技术特征:
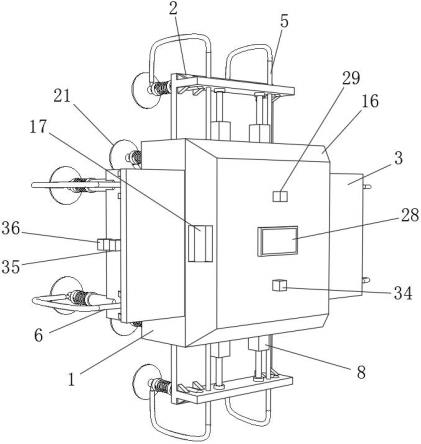
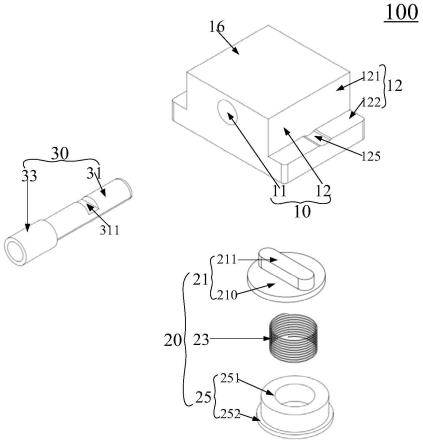
1.一种建筑施工用墙体修正垂直度测量用设备,包括壳体(1)、纵向行走架(2)和横向行走架(3),其特征在于:所述壳体(1)的顶壁后部、底壁后部、左侧壁前部和右侧壁前部均设置有限位槽(4),所述纵向行走架(2)与壳体(1)顶壁上和底壁上的限位槽(4)滑动连接,所述横向行走架(3)与壳体(1)左侧壁上和右侧壁上的限位槽(4)滑动连接,所述壳体(1)顶壁上和底壁上均固定连接有两根硬直管a(5),所述壳体(1)左侧壁上和右侧壁上均固定连接有两根硬直管b(6),所述壳体(1)后侧壁上均匀固定连接有四根硬直管c(7),所述壳体(1)顶壁上的两根硬直管a(5)之间和壳体(1)底壁上的两根硬直管a(5)之间均设置有两个电动推杆a(8),所述壳体(1)左侧壁上的两根硬直管b(6)之间和壳体(1)右侧壁上的两根硬直管b(6)之间均设置有两个电动推杆b(9),上侧两个所述电动推杆a(8)的输出端均固定连接在纵向行走架(2)的内侧顶端,下侧两个所述电动推杆a(8)的输出端均固定连接在纵向行走架(2)的内侧底端,左侧两个所述电动推杆b(9)的输出端均固定连接在横向行走架(3)的内侧左端,右侧两个所述电动推杆b(9)的输出端均固定连接在横向行走架(3)的内侧右端,所述壳体(1)上侧的两个电动推杆a(8)之间设置有控制器(10),所述壳体(1)下侧的两个电动推杆a(8)之间设置有真空泵(11),所述真空泵(11)的进气口固定连接有四通阀(12),所述四通阀(12)顶端固定连接有汇流器a(13),所述四通阀(12)前端固定连接有汇流器b(14),所述四通阀(12)后端固定连接有汇流器c(15),所述汇流器a(13)与四根硬直管a(5)连通,所述汇流器b(14)与四根硬直管b(6)连通,所述汇流器c(15)与四根硬直管c(7)连通,所述壳体(1)前端固定连接有前端盖(16),所述前端盖(16)左右两端均固定连接有gps定位器(17),所述壳体(1)后端中部均匀设置有若干个光电传感器a(18),所述纵向行走架(2)顶端后部左右两侧、纵向行走架(2)底端后部左右两侧、横向行走架(3)左端后部上下两侧、横向行走架(3)右端后部上下两侧和壳体(1)后端四角均固定连接有套筒(19),所述套筒(19)内侧滑动连接有滑杆(20),所述滑杆(20)后端通过球铰与真空吸盘(21)相连,所述壳体(1)顶壁上的两根硬直管a(5)分别与纵向行走架(2)顶端后侧的两个真空吸盘(21)连通,所述壳体(1)底壁上的两根硬直管a(5)分别与纵向行走架(2)底端后侧的两个真空吸盘(21)连通,所述壳体(1)左侧壁上的两根硬直管b(6)分别与横向行走架(3)左端后侧的两个真空吸盘(21)连通,所述壳体(1)右侧壁上的两根硬直管b(6)分别与横向行走架(3)右端后侧的两个真空吸盘(21)连通,所述壳体(1)后侧壁上的四根硬直管c(7)分别与壳体(1)后侧的四个真空吸盘(21)连通,所述滑杆(20)外侧设置有弹簧(22),所述套筒(19)后端固定连接有电磁铁a(23),所述滑杆(20)前部外侧固定连接有电磁铁b(24),所述纵向行走架(2)后侧顶端中部固定连接有光电传感器b(33),所述前端盖(16)前端下部固定连接有光电传感器c(34),所述横向行走架(3)左右两端的中部前侧均固定连接有光电传感器d(35),所述横向行走架(3)左右两端的中部后侧均固定连接有光电传感器e(36),若干个所述光电传感器a(18)的检测端均朝后,所述光电传感器b(33)的检测端朝上,所述光电传感器c(34)的检测端朝下,所述横向行走架(3)左端的光电传感器d(35)的检测端朝左,所述横向行走架(3)右端的光电传感器d(35)的检测端朝右,两个所述光电传感器d(35)的检测端均朝后,上侧两个所述电动推杆a(8)分别固定连接在壳体(1)顶壁的左右两侧,下侧两个所述电动推杆a(8)分别固定连接在壳体(1)底壁的左右两侧,左侧两个所述电动推杆b(9)分别固定连接在壳体(1)左侧壁的上下两侧,右侧两个所述电动推杆b(9)分别固定连接在壳体(1)右侧壁的上下两侧,所述控制器(10)固定连接在壳体(1)的内侧顶端,所述真空泵(11)固定连接在壳
体(1)的内侧底端,所述弹簧(22)设置在电磁铁a(23)和电磁铁b(24)之间,所述滑杆(20)贯穿电磁铁a(23),所述滑杆(20)前部外侧均匀固定连接有限位块(25),所述限位块(25)前后两端均设置有缓冲层(26),所述套筒(19)内侧设置有与限位块(25)对应的滑槽(27),所述弹簧(22)始终处于压缩状态,所述前端盖(16)前端中部固定连接有显示器(28),所述前端盖(16)前端上部固定连接有蓝牙(29)。2.根据权利要求1所述的一种建筑施工用墙体修正垂直度测量用设备,其特征在于:所述纵向行走架(2)顶端前部左右两侧、纵向行走架(2)底端前部左右两侧、横向行走架(3)左端前部上下两侧和横向行走架(3)右端前部上下两侧均设置有限位孔(30),上侧两个所述硬直管a(5)分别与纵向行走架(2)顶端的两个限位孔(30)滑动连接,下侧两个所述硬直管a(5)分别与纵向行走架(2)底端的两个限位孔(30)滑动连接,左侧两个所述硬直管b(6)分别与横向行走架(3)左端的两个限位孔(30)滑动连接,右侧两个所述硬直管b(6)分别与横向行走架(3)右端的两个限位孔(30)滑动连接。3.根据权利要求1所述的一种建筑施工用墙体修正垂直度测量用设备,其特征在于:所述纵向行走架(2)前侧壁上设置有与硬直管c(7)对应的通槽(31),所述通槽(31)的形状为条形,所述壳体(1)的左侧壁上和右侧壁上均设置有排气孔(32),所述壳体(1)左侧壁上的排气孔(32)设置在壳体(1)左侧壁上的两个电动推杆b(9)之间,所述壳体(1)右侧壁上的排气孔(32)设置在壳体(1)右侧壁上的两个电动推杆b(9)之间。4.根据权利要求1所述的一种建筑施工用墙体修正垂直度测量用设备,其特征在于:所述控制器(10)通过信号线与电动推杆a(8)、电动推杆b(9)、真空泵(11)、四通阀(12)、gps定位器(17)、光电传感器a(18)、光电传感器b(33)、光电传感器c(34)、光电传感器d(35)、光电传感器e(36)、电磁铁a(23)、电磁铁b(24)、显示器(28)和蓝牙(29)相连。5.根据权利要求1所述的一种建筑施工用墙体修正垂直度测量用设备的使用方法,其特征在于:包括以下步骤:s1.姿态调整工作人员将修正垂直度测量用设备的真空吸盘(21)后端与墙体贴合,控制器(10)获取两个gps定位器(17)的三维空间位置信息后,得出纵向行走架(2)的中轴线与水平面的夹角,并通过显示器(28)呈现纵向行走架(2)的中轴线与水平面的夹角,工作人员根据显示器(28)呈现的夹角调节壳体(1)的姿态,使纵向行走架(2)的中轴线与水平面垂直;s2.设备初始化纵向行走架(2)顶端和底端的电磁铁a(23)和电磁铁b(24)通电并相互吸合,横向行走架(3)左端和右端的电磁铁a(23)和电磁铁b(24)通电并相互吸合,使纵向行走架(2)顶端和底端的滑杆(20)以及横向行走架(3)左端和右端的滑杆(20)滑入套筒(19),使与纵向行走架(2)顶端和底端的滑杆(20)以及横向行走架(3)左端和右端的滑杆(20)对应的真空吸盘(21)远离墙体,四通阀(12)底端和后端导通,顶端和前端闭合,启动真空泵(11),真空泵(11)通过四通阀(12)、汇流器c(15)和硬直管c(7)抽取壳体(1)底端四个真空吸盘(21)内侧的空气,使壳体(1)底端的四个真空吸盘(21)吸附在墙体表面,此时修正垂直度测量用设备呈初始化状态;s3.纵向测量壳体(1)底壁上的电动推杆a(8)收缩,壳体(1)顶壁上的电动推杆a(8)拉伸,使纵向行
走架(2)相对墙体及壳体(1)向上移动,之后纵向行走架(2)顶端和底端的电磁铁a(23)和电磁铁b(24)断电,弹簧(22)推动滑杆(20)沿套筒(19)向后滑动,使纵向行走架(2)顶端和底端的真空吸盘(21)与墙体贴合,四通阀(12)顶端导通,真空泵(11)通过四通阀(12)、汇流器a(13)和硬直管a(5)抽取纵向行走架(2)顶端和底端的真空吸盘(21)内侧的空气,使纵向行走架(2)顶端和底端的真空吸盘(21)吸附在墙体表面,四通阀(12)后端闭合,壳体(1)后端四角的电磁铁a(23)和电磁铁b(24)通电并相互吸合,壳体(1)后端四角的滑杆(20)和真空吸盘(21)远离墙体,壳体(1)底壁上的电动推杆a(8)拉伸,壳体(1)顶壁上的电动推杆a(8)收缩,使壳体(1)相对墙体及纵向行走架(2)向上移动,之后壳体(1)后端四角的电磁铁a(23)和电磁铁b(24)断电,弹簧(22)推动滑杆(20)沿套筒(19)向后滑动,使壳体(1)后端四角的真空吸盘(21)与墙体贴合,四通阀(12)后端导通,真空泵(11)通过四通阀(12)、汇流器c(15)和硬直管c(7)抽取壳体(1)底端四个真空吸盘(21)内侧的空气,使壳体(1)底端的四个真空吸盘(21)吸附在墙体表面,四通阀(12)顶端闭合,纵向行走架(2)顶端和底端的电磁铁a(23)和电磁铁b(24)通电并相互吸合,纵向行走架(2)顶端和底端的滑杆(20)和真空吸盘(21)远离墙体,修正垂直度测量用设备按照上述运行方式,使纵向行走架(2)和壳体(1)交替相对墙体向上移动,实现纵向上行,纵向上行过程中,壳体(1)后端中部均匀设置的光电传感器a(18)对墙体进行测距,控制器(10)结合两个gps定位器(17)传递的三维空间位置信息,判断各个光电传感器a(18)的三维空间位置信息,并结合光电传感器a(18)测距结果测定纵向上行过程中经过的墙体的垂直度;s4.横向行走修正垂直度测量用设备纵向上行过程中,光电传感器b(33)对上方障碍物到自身的距离进行检测,当所测距离小于300mm时,说明修正垂直度测量用设备到达墙体顶部,控制器(10)使四通阀(12)、电磁铁a(23)和电磁铁b(24)的状态与所述s2中初始化状态一致,壳体(1)左侧壁上的电动推杆b(9)收缩,壳体(1)右侧壁上的电动推杆b(9)拉伸,使横向行走架(3)相对墙体及壳体(1)向右移动,之后横向行走架(3)左端和右端的电磁铁a(23)和电磁铁b(24)断电,弹簧(22)推动滑杆(20)沿套筒(19)向后滑动,使横向行走架(3)左端和右端的真空吸盘(21)与墙体贴合,四通阀(12)前端导通,真空泵(11)通过四通阀(12)、汇流器b(14)和硬直管b(6)抽取横向行走架(3)左端和右端的真空吸盘(21)内侧的空气,使横向行走架(3)左端和右端的真空吸盘(21)吸附在墙体表面,四通阀(12)后端闭合,壳体(1)后端四角的电磁铁a(23)和电磁铁b(24)通电并相互吸合,壳体(1)后端四角的滑杆(20)和真空吸盘(21)远离墙体,壳体(1)左侧壁上的电动推杆b(9)拉伸,壳体(1)右侧壁上的电动推杆b(9)收缩,使壳体(1)相对墙体及横向行走架(3)向右移动,之后壳体(1)后端四角的电磁铁a(23)和电磁铁b(24)断电,弹簧(22)推动滑杆(20)沿套筒(19)向后滑动,使壳体(1)后端四角的真空吸盘(21)与墙体贴合,四通阀(12)后端导通,真空泵(11)通过四通阀(12)、汇流器c(15)和硬直管c(7)抽取壳体(1)底端四个真空吸盘(21)内侧的空气,使壳体(1)底端的四个真空吸盘(21)吸附在墙体表面,四通阀(12)前端闭合,横向行走架(3)左端和右端的电磁铁a(23)和电磁铁b(24)通电并相互吸合,横向行走架(3)左端和右端的滑杆(20)和真空吸盘(21)远离墙体,修正垂直度测量用设备按照上述运行方式,使横向行走架(3)和壳体(1)交替相对墙体向右移动,使修正垂直度测量用设备横向右行;s5.面域测量
修正垂直度测量用设备横向右行后,壳体(1)底壁上的电动推杆a(8)拉伸,壳体(1)顶壁上的电动推杆a(8)收缩,使纵向行走架(2)相对墙体及壳体(1)向下移动,之后纵向行走架(2)顶端和底端的电磁铁a(23)和电磁铁b(24)断电,弹簧(22)推动滑杆(20)沿套筒(19)向后滑动,使纵向行走架(2)顶端和底端的真空吸盘(21)与墙体贴合,四通阀(12)顶端导通,真空泵(11)通过四通阀(12)、汇流器a(13)和硬直管a(5)抽取纵向行走架(2)顶端和底端的真空吸盘(21)内侧的空气,使纵向行走架(2)顶端和底端的真空吸盘(21)吸附在墙体表面,四通阀(12)后端闭合,壳体(1)后端四角的电磁铁a(23)和电磁铁b(24)通电并相互吸合,壳体(1)后端四角的滑杆(20)和真空吸盘(21)远离墙体,壳体(1)底壁上的电动推杆a(8)收缩,壳体(1)顶壁上的电动推杆a(8)拉伸,使壳体(1)相对墙体及纵向行走架(2)向下移动,之后壳体(1)后端四角的电磁铁a(23)和电磁铁b(24)断电,弹簧(22)推动滑杆(20)沿套筒(19)向后滑动,使壳体(1)后端四角的真空吸盘(21)与墙体贴合,四通阀(12)后端导通,真空泵(11)通过四通阀(12)、汇流器c(15)和硬直管c(7)抽取壳体(1)底端四个真空吸盘(21)内侧的空气,使壳体(1)底端的四个真空吸盘(21)吸附在墙体表面,四通阀(12)顶端闭合,纵向行走架(2)顶端和底端的电磁铁a(23)和电磁铁b(24)通电并相互吸合,纵向行走架(2)顶端和底端的滑杆(20)和真空吸盘(21)远离墙体,修正垂直度测量用设备按照上述运行方式,使纵向行走架(2)和壳体(1)交替相对墙体向下移动,实现纵向下行,纵向下行过程中,壳体(1)后端中部均匀设置的光电传感器a(18)配合控制器(10)和两个gps定位器(17)测定纵向下行过程中经过的墙体的垂直度,光电传感器c(34)对地面到自身的距离进行检测,当所测距离小于500mm时,说明修正垂直度测量用设备到达墙体底部,控制器(10)使四通阀(12)、电磁铁a(23)和电磁铁b(24)的状态与所述s2中初始化状态一致,接着修正垂直度测量用设备按照所述s4中的运行方式再次横向右行,完成面域测量中的一个检测周期,重复多个检测周期后完成面域测量;s6.位置校正限位块(25)滑动至滑槽(27)内侧后端时真空吸盘(21)到光电传感器e(36)检测端的距离为参考距离,修正垂直度测量用设备进行面域测量过程中,当横向行走架(3)左端的光电传感器e(36)所测距离大于参考距离或横向行走架(3)左端的光电传感器d(35)所测距离小于300mm时,说明修正垂直度测量用设备到达墙体左边缘,控制器(10)使四通阀(12)、电磁铁a(23)和电磁铁b(24)的状态与所述s2中初始化状态一致,修正垂直度测量用设备按照所述s4中的运行方式使横向行走架(3)和壳体(1)各右移一次,接着继续进行面域测量,当横向行走架(3)右端的光电传感器e(36)所测距离大于参考距离或横向行走架(3)右端的光电传感器d(35)所测距离小于300mm时,说明修正垂直度测量用设备到达墙体右边缘,修正垂直度测量用设备的控制器(10)使四通阀(12)、电磁铁a(23)和电磁铁b(24)的状态与所述s2中初始化状态一致,壳体(1)左侧壁上的电动推杆b(9)拉伸,壳体(1)右侧壁上的电动推杆b(9)收缩,使横向行走架(3)相对墙体及壳体(1)向左移动,之后横向行走架(3)左端和右端的电磁铁a(23)和电磁铁b(24)断电,弹簧(22)推动滑杆(20)沿套筒(19)向后滑动,使横向行走架(3)左端和右端的真空吸盘(21)与墙体贴合,四通阀(12)前端导通,真空泵(11)通过四通阀(12)、汇流器b(14)和硬直管b(6)抽取横向行走架(3)左端和右端的真空吸盘(21)内侧的空气,使横向行走架(3)左端和右端的真空吸盘(21)吸附在墙体表面,四通阀(12)后端闭合,壳体(1)后端四角的电磁铁a(23)和电磁铁b(24)通电并相互吸合,壳体(1)后端四角
的滑杆(20)和真空吸盘(21)远离墙体,壳体(1)左侧壁上的电动推杆b(9)收缩,壳体(1)右侧壁上的电动推杆b(9)拉伸,使壳体(1)相对墙体及横向行走架(3)向左移动,之后壳体(1)后端四角的电磁铁a(23)和电磁铁b(24)断电,弹簧(22)推动滑杆(20)沿套筒(19)向后滑动,使壳体(1)后端四角的真空吸盘(21)与墙体贴合,四通阀(12)后端导通,真空泵(11)通过四通阀(12)、汇流器c(15)和硬直管c(7)抽取壳体(1)底端四个真空吸盘(21)内侧的空气,使壳体(1)底端的四个真空吸盘(21)吸附在墙体表面,四通阀(12)前端闭合,横向行走架(3)左端和右端的电磁铁a(23)和电磁铁b(24)通电并相互吸合,横向行走架(3)左端和右端的滑杆(20)和真空吸盘(21)远离墙体,接着继续进行面域测量;s7.结果反馈面域测量过程中,控制器(10)通过蓝牙(29)将墙体垂直度信息及两个gps定位器(17)的三维空间位置信息传递至工作人员携带的移动设备中,面域测量结束后,工作人员关闭真空泵(11),使真空吸盘(21)停止提供吸附力,接着将修正垂直度测量用设备从墙体处取下,完成垂直度测量工作。
技术总结
本发明提供一种建筑施工用墙体修正垂直度测量用设备,涉及建筑工程施工检测技术领域。该建筑施工用墙体修正垂直度测量用设备,包括壳体、纵向行走架和横向行走架,所述壳体下侧的两个电动推杆A之间设置有真空泵,所述四通阀顶端固定连接有汇流器A,所述四通阀前端固定连接有汇流器B,所述四通阀后端固定连接有汇流器C,所述汇流器A与四根硬直管A连通,所述汇流器B与四根硬直管B连通,所述汇流器C与四根硬直管C连通,所述壳体后端中部均匀设置有若干个光电传感器A,所述滑杆后端通过球铰与真空吸盘相连。设备能够自动化进行大量程墙体垂直度测量,减少人力物力消耗,节约设备占用空间,灵活便利。灵活便利。灵活便利。
技术研发人员:李星明 袁野 杨东 赵彦军 尹俊 张星亮
受保护的技术使用者:山西卓弈翔科技有限公司
技术研发日:2022.03.30
技术公布日:2022/7/12
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。