1.本发明涉及载人航天技术领域,尤其涉及一种舱外航天服头盔面窗光学性能综合测试装置及方法。
背景技术:
2.舱外航天服是航天员在轨进行空间出舱任务时的必备装备,而头盔面窗则是航天员着舱外航天服后进行空间出舱任务时直接观察了解外界的唯一窗口,在极端高/低温、真空、辐照等恶劣空间环境下集压力防护、视觉防护、热防护、视觉工效保障等多种功能于一体,视觉防护和视觉工效保障功能是其所独有的特殊防护功能。
3.头盔面窗从内向外为多层面窗结构,其整体光学性能,包括透光率、雾度、光畸变、角偏差,是否满足要求是航天员顺利运行空间出舱任务的基本条件,也是航天员能否进行精细化操作的保障。因此,航天服地面总装集成及验收交付过程中,头盔面窗的各项光学性能是测试考核的要点。
技术实现要素:
4.针对舱外航天服研制及产品验收交付过程中头盔面窗光学性能综合测试问题,本发明提供一种舱外航天服头盔面窗光学性能综合测试装置及方法,在测量过程中仪器与面窗之间需保持非接触以防止面窗受到磕碰划伤,实现了服装头盔内部带压力和不带压力两种工况测量,测试准确,操控便捷。
5.为达到上述目的,本发明提供了一种舱外航天服头盔面窗光学性能综合测试装置,包括信号发射单元、信号接收单元、底盘、运行机构以及控制单元;
6.所述底盘设置安装座,所述安装座提供安装舱外航天服的密封接口;
7.所述运行机构包括主动轴、从动轴和底座;底座输出驱动轴连接的主动轴,所述底座能够带动所述主动轴水平x向平动、水平y向平动以及绕竖直z轴旋转;所述从动轴固定至所述底座输出驱动轴设置在所述舱外航天服外部,随主动轴同步运动;
8.所述信号发射单元安装至所述从动轴;所述信号接收单元安装至所述主动轴;所述信号发射单元发射的光线穿过所述舱外航天服头盔面窗,由所述信号接收单元接收;
9.所述控制单元控制所述运行机构,调整所述信号发射单元和所述信号发射单元的位置,基于所述信号接收单元传送的信号,测量舱外航天服头盔面窗光学性能参数。
10.进一步地,所述底盘包括压盘、转盘、盘根密封条以及支撑盘;所述支撑盘通过桁架固定支撑;所述压盘为中心圆孔的圆环盘结构,所述压盘的外环固定在所述支撑盘的翻边法兰上,所述压盘和所述支撑盘形成容纳空间,所述转盘设置在所述容纳空间;所述压盘中心圆孔为穿过该孔与转盘固定连接的主动轴提供了水平平动及绕竖直z轴转动的运行空间;所述转盘上、下表面中心均设计有传动轴,通过下表面中心部位的传动轴与运行机构底座上输出驱动轴固定连接,上表面中心部位的传动轴与所述主动轴固定连接;所述转盘下表面上设有沿周向的双密封槽,密封槽内安装盘根密封条,使得所述转盘在绕z轴旋转运动
及水平x向、y向平动过程中,所述转盘与所述支撑盘之间形成动密封。
11.进一步地,所述压盘上表面固定密封安装有安装座,所述安装座筒壁上设置有气体管路接嘴,用于服装内部的气体压力加注和释放。
12.进一步地,所述主动轴固定至所述转盘的上表面中心部位的传动轴,随所述转盘旋转及水平平动,所述转盘上表面传动轴设置在所述安装座内部;所述主动轴上设置第一移动组件,所述第一移动组件,用于调整所述信号接收单元的高度、竖直平面内和竖直z轴的夹角角度及与面窗之间的间距;所述从动轴平行于所述主动轴,所述从动轴设置第二移动组件,所述第二用于调整所述信号发射单元的高度、所述信号发射单元与面窗的间距,并调整所述信号接收单元与所述发射单元之间的光轴同轴。
13.进一步地,所述信号发射单元,包括:标准c光源、准直透镜以及标靶板;
14.所述标准c光源通电后发光,所发射的光经所述准直透镜后形成平行光,所述平行光经被测舱外航天服头盔面窗后的透射光被所述信号接收单元捕捉采集,从而用于舱外航天服头盔面窗的透光率和雾度测试;
15.所述标靶板为平板玻璃片,其上印制有均匀分布的黑圆点点阵;所述平行光经所述点阵后,再经舱外航天服头盔面窗后被所述信号接收单元捕捉采集,与点阵的真实分布进行对比,从而测试航天服头盔面窗的光畸变和角偏差。
16.进一步地,所述信号接收单元,包括:积分球、光纤、光谱仪、ccd相机以及距离传感器;
17.所述ccd相机用对所述发射单元所属部件标靶板上的高精度点阵经舱外航天服头盔面窗后形成的新的点阵图像的采集,利用新点阵与标靶板点阵中对应点位的变化信息,从而通过控制单元所配备的软件计算出航天服头盔面窗的光畸变、角偏差;
18.所述积分球前部设置有进光孔,后部设置有光陷阱,顶部设置有测试孔,测试孔尾部通过光纤与所述光谱仪连接;所述积分球后部的光陷阱设置连接反光板、快门电机,当在快门电机作用下反光板盖住光陷阱时,通过所述积分球顶部测试孔来采集透射光,经所述测试孔尾部的光纤传导到所述光谱仪后完成对透射光通量的分析计算;当在快门电机作用下反光板撤离光陷阱时,通过所述积分球顶部测试孔来采集散射光,经所述测试孔尾部的光纤传导到所述光谱仪后完成对散射光通量的分析计算;通过控制单元所配备的软件基于光通量计算出航天服头盔面窗的透光率、雾度;
19.所述距离传感器用于采集与舱外航天服头盔面窗之间的距离,实现对航天服头盔面窗内压力面窗的扫描。
20.进一步地,所述控制单元基于航天服头盔面窗内压力面窗的扫描,对所述航天服头盔面窗进行三维建模。
21.进一步地,所述控制单元,在不放置舱外航天服头盔面窗的情况下,开启信号发射单元的标准c光源、信号接收单元的积分球和光谱仪,通过调节使标准c光源发出的光线正好全部透过积分球前端进光孔,开启积分球快门电机使得与快门电机连接的反光板盖住积分球光陷阱;由积分球顶部测试孔采集的光经光纤导入到光谱仪后并由光谱仪计算出光通量t1;当与快门电机连接的反光板撤离积分球光陷阱时,由积分球顶部测试孔采集的光经光纤导入到光谱仪后并由光谱仪计算出的光通量t3;调整ccd相机和标靶板,使标靶板上点阵中心点位于ccd相机视野中心,ccd相机采集标靶上点阵的原始点阵图像;
22.放置舱外航天服头盔面窗的情况下,开启信号发射单元的标准c光源、信号接收单元的积分球和光谱仪,通过调节使标准c光源发出的光线正好全部透过积分球前端进光孔,开启积分球快门电机使得与快门电机连接的反光板盖住积分球光陷阱;由积分球顶部测试孔采集的光经光纤导入到光谱仪后并由光谱仪计算出光通量t2;当与快门电机连接的反光板撤离积分球光陷阱时,由积分球顶部测试孔采集的光经光纤导入到光谱仪后并由光谱仪计算出的光通量t4;ccd相机拍照采集标靶上点阵经航天服头盔面窗会后的新点阵图像;
23.计算透光率雾度
24.根据ccd相机拍摄的原始点阵图像和新点阵图像,获取标靶板中心原点的中心oi偏离检测板中心x轴的角度偏差分量e
ix
,ccd相机拍摄到的oi偏离检测板中心y轴的角度偏差分量e
iy
,i为入射角度,计算角偏差
25.调整运行机构保持ccd相机与标靶板同步运动,当ccd相机视野中心与标靶板点阵中心点的连线穿过新选的面窗测试点时,进行拍照,计算新选的面窗测试点的角偏差,直至完成所有测试点的角偏差测试。
26.测量当前面窗测量点的光畸变值:当前以标靶板中心原点为初始位置,每移动到新位置时,ccd相机拍摄点阵图像;针对所采集点阵图,软件自动识别、计算各张点阵图上中心点的x轴向偏移量及y轴向偏移量;分别获得x轴向最大偏移量max x和最小偏移量min x、y轴向最大偏移量max y和最小偏移量min y;计算出x轴向上角偏差最大值与最小值的差值θmax x-θmin x、y轴向上角偏差最大值与最小值的差值θmax y-θmin y,并以其中大的差值作为该测量处面窗的光畸变值;其中θmax x,θmin x分别为放置面窗后通过ccd捕捉到的标靶板中心原点偏离原标靶板中心圆点在x轴的角度偏差分量e
ix
的最大值和最小值;θmax y和θmin y分别为放置面窗后通过ccd捕捉到的标靶板中心原点偏离原标靶板中心圆点在y轴的角度偏差分量e
iy
的最大值和最小值;
27.复位到初始位置,重新选择面窗测试点,调整运行机构保持ccd相机与标靶板同步运动,当ccd相机视野中心与标靶板点阵中心点的连线穿过重新选择的面窗测试点时,测量当前面窗测量点的光畸变值,直至完成面窗所有测量点的光畸变值测量。
28.另一方面提供一种利用所述的舱外航天服头盔面窗光学性能综合测试装置进行光学性能综合测试的方法,包括:
29.将舱外航天服安装至底盘的安装座;
30.通过运行机构底座调整主动轴位置及旋转角度,使得主动轴信号接收单元上距离传感器的轴线与服装纵向中性面基本一致;调整主动轴上信号接收单元的高度,使得距离传感器的轴线与面窗中心高度基本一致;调节信号接收单元上的距离传感器与面窗之间间距,使得距离传感器能够采集与面窗之间间距;在每个高度,沿水平方向以设定步长扫描航天服头盔面窗内压力面窗;
31.调整从动轴上信号发射单元的高度,使得信号发射的单元上距离传感器的轴线与面窗中心高度基本一致;调节信号发射的单元上的距离传感器与面窗之间间距,使得信号发射的单元上的距离传感器能够采集与面窗之间间距;在每个高度,沿水平方向以设定步长扫描航天服头盔面窗外压力面窗;由控制单元对所述航天服头盔面窗进行三维建模;
32.调整信号发射单元与信号接收单元的位置,使得所述信号发射单元发射的光纤发出的光线能够全部浸入所述信号接收单元的积分球的进光孔;
33.控制单元基于所述信号接收单元传送的信号,测量舱外航天服头盔面窗光学性能参数。
34.进一步地,还包括:向所述舱外航天服内充入气体,压力达到所述舱外航天服的工作压力;再次测量舱外航天服头盔面窗光学性能参数。
35.进一步地,测量舱外航天服头盔面窗光学性能参数,包括:
36.在不放置舱外航天服头盔面窗的情况下,开启信号发射单元的标准c光源、信号接收单元的积分球和光谱仪,通过调节使标准c光源发出的光线正好全部透过积分球前端进光孔,开启积分球快门电机使得与快门电机连接的反光板盖住积分球光陷阱;由积分球顶部测试孔采集的光经光纤导入到光谱仪后并由光谱仪计算出光通量t1;当与快门电机连接的反光板撤离积分球光陷阱时,由积分球顶部测试孔采集的光经光纤导入到光谱仪后并由光谱仪计算出的光通量t3;调整ccd相机和标靶板,使标靶板上点阵中心点位于ccd相机视野中心,ccd相机采集标靶上点阵的原始点阵图像;
37.放置舱外航天服头盔面窗的情况下,开启信号发射单元的标准c光源、信号接收单元的积分球和光谱仪,通过调节使标准c光源发出的光线正好全部透过积分球前端进光孔,开启积分球快门电机使得与快门电机连接的反光板盖住积分球光陷阱;由积分球顶部测试孔采集的光经光纤导入到光谱仪后并由光谱仪计算出光通量t2;当与快门电机连接的反光板撤离积分球光陷阱时,由积分球顶部测试孔采集的光经光纤导入到光谱仪后并由光谱仪计算出的光通量t4;ccd相机拍照采集标靶上点阵经航天服头盔面窗会后的新点阵图像;
38.计算透光率雾度
39.根据ccd相机拍摄的原始点阵图像和新点阵图像,获取标靶板中心原点的中心oi偏离检测板中心x轴的角度偏差分量e
ix
,ccd相机拍摄到的oi偏离检测板中心y轴的角度偏差分量e
iy
,i为入射角度,计算角偏差
40.测量当前面窗测量点的光畸变值:当前以标靶板中心原点为初始位置,按照步长1mm移动标靶板,扫描3mm
×
3mm的给定区域,每移动到新位置时,ccd相机拍摄点阵图像;针对所采集点阵图,软件自动识别、计算各张点阵图上中心点的x轴向偏移量及y轴向偏移量;分别获得x轴向最大偏移量max x和最小偏移量min x、y轴向最大偏移量max y和最小偏移量min y;计算出x轴向上角偏差最大值与最小值的差值θmax x-θmin x、y轴向上角偏差最大值与最小值的差值θmax y-θmin y,并以其中大的差值作为该测量处面窗的光畸变值;其中θmax x,θmin x分别为放置面窗后通过ccd捕捉到的标靶板中心原点偏离原标靶板中心圆点在x轴的角度偏差分量e
ix
的最大值和最小值;θmax y和θmin y分别为放置面窗后通过ccd捕捉到的标靶板中心原点偏离原标靶板中心圆点在y轴的角度偏差分量e
iy
的最大值和最小值;
41.复位到初始位置,重新选择面窗测试点,调整运行机构保持ccd相机与标靶板同步运动,当ccd相机视野中心与标靶板点阵中心点的连线穿过重新选择的面窗测试点时,测量当前面窗测量点的光畸变值,直至完成面窗所有测量点的光畸变值测量。
42.本发明的上述技术方案具有如下有益的技术效果:
43.(1)本发明实现了舱外航天服内部充注气压和不充注气压两种工况下的头盔面窗整体光学性能测试,包括透光率、雾度、角偏差、光畸变的测试;保证了产品验收交付的可靠性。
44.(2)本发明的光学性能综合测试装置结构简单,操控便捷,测量准确。
附图说明
45.图1为本发明设备结构组成图。
46.图2为本发明设备底盘密封结构图。
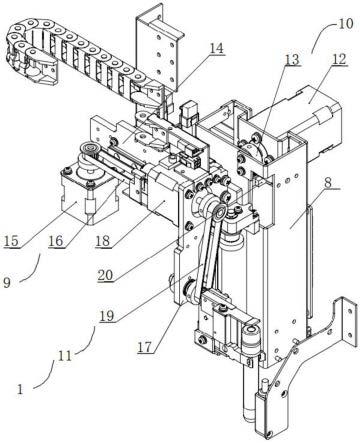
47.图3为本发明设备运动机构单元零部件示意图。
48.图4为本发明设备信号接收单元组成图。
49.图5为本发明设备积分球结构图。
50.图6为本发明设备信号发射单元和接收单元示意图。
51.图7为本发明面窗曲面仿形后的局部点云图。
52.图8为本发明的头盔面窗角偏差测量算法原理图。
53.图9为本发明的头盔面窗光畸变测量原理图。
具体实施方式
54.为使本发明的目的、技术方案和优点更加清楚明了,下面结合具体实施方式并参照附图,对本发明进一步详细说明。应该理解,这些描述只是示例性的,而并非要限制本发明的范围。此外,在以下说明中,省略了对公知结构和技术的描述,以避免不必要地混淆本发明的概念。
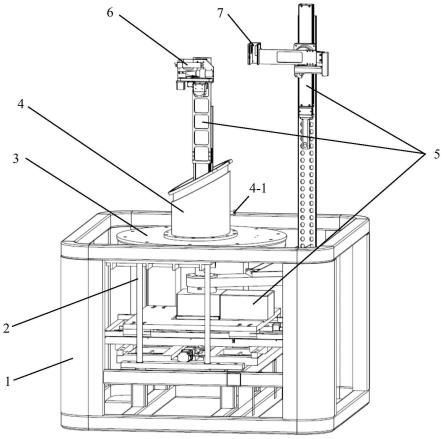
55.如图1所示,舱外航天服头盔面窗光学性能综合测试装置包括箱体1、桁架2、底盘3、安装座4、运行机构5、信号接收单元6、信号发射单元7以及控制单元。可实现舱外服加压(服内气体压力工况)、不加压两种工况下的服装头盔面窗整体的透光率、雾度、光畸变、角偏差共4项光学性能指标的测试。
56.所述底盘3安装在箱体1内部的桁架2上,由压盘、转盘、盘根密封条、支撑盘组成,如图2。所述压盘为中心圆孔的圆环盘结构,所述压盘的外环固定在所述支撑盘的翻边法兰上,所述压盘和所述支撑盘形成容纳空间,所述转盘设置在所述容纳空间;所述压盘中心圆孔为穿过该孔与转盘固定连接的主动轴提供了水平平动及绕竖直z轴转动的运行空间;压盘,支撑盘为固定静止结构,转盘与运行机构5的主动轴相连并随主动轴做平面旋转运动,主动轴即图,图2中的传动轴,又称为c轴。所述转盘上、下表面中心均设计有传动轴,通过下表面中心部位的传动轴与运行机构底座上输出驱动轴固定连接,上表面中心部位的传动轴与所述主动轴固定连接。为确保服装带压工况下头盔面窗光学性能测试,转盘下表面上设计有双密封槽,每条密封槽内均安装有盘根密封条,使得转盘下表面在旋转运动过程中与支撑盘上表面之间形成动密封,从而维持服装、安装座4、底盘3之间形成的内部容腔的气体压力,确保服装带压工况状态测试。此外,支撑盘上设计有蝌蚪型的油槽,油槽内的存油既可为转盘运动提供润滑,又可增加转盘运动过程中与支撑盘之间的密封性能。
57.所述安装座4为椭圆筒状结构,上部提供有服装安装接口,下部密封固连在底盘3
上,并与服装、底盘3之间共同形成能够封闭的容腔。安装座4的筒壁正面中部提供有一个气体管路接嘴4-1,用于内部容腔的气体压力加注和释放。
58.所述运行机构5包含有主动轴、从动轴和底座构成,主动轴主体部分位于服装内部,从动轴位于服装外部,二者在控制单元的控制下相互配合,形成具有9自由度的空间仿形运动机构,如图3所示,从而完成对舱外服头盔面窗的仿形及测试。所述底座可做水平x向平动、水平y向平动,并提供了绕竖直z轴旋转的输出驱动轴,从而使得与底座输出驱动轴连接的主动轴具有3运动自由度;所述主动轴固定至所述转盘的上表面中心部位的传动轴,随所述转盘旋转及水平平动,所述转盘上表面传动轴设置在所述安装座内部;所述主动轴上设置第一移动组件,该移动组件上设置有竖直面内转动及沿组件轴线方向进给运动的装置,用于调整所述信号接收单元的高度、竖直方向的旋转角度及其与面窗之间的间距,使得所述信号接收单元具有3运动自由度;所述从动轴平行于所述主动轴,所述从动轴设置第二移动组件,该移动组件上同样设置有竖直面内转动及沿组件轴线方向进给运动的装置,用于调整所述信号发射单元的高度、所述信号接收单元与面窗的间距,并调整所述信号接收单元与所述发射单元之间的光轴同轴,使得所述信号发射单元具也有3运动自由度。调整所述信号接收单元与所述发射单元之间的光轴同轴,可以由中央控制处理单元采集到的发射单元光学器件运行数据,结合结构尺寸,自动反馈计算出接收单元端对应的光学器件的目标位置。也可以手动调整,也可根据发射光是否全部进入到积分球的进光孔来判断。
59.所述信号接收单元6安装在运行机构5的主动轴上,主要由积分球、光纤、光谱仪(注:光谱仪设置在控制单元机柜内)、距离传感器及“ccd 镜头”等组成,见图4。所述积分球直径为φ60mm,其前部设置有直径φ10mm的进光孔,后部设置有直径φ9.5mm光陷阱,顶部设置有测试孔,测试孔尾部通过光纤与所述光谱仪连接;所述积分球后部的光陷阱设置连接反光板、快门电机,当在快门电机作用下反光板盖住光陷阱时,通过所述积分球顶部测试孔来采集透射光,经所述测试孔尾部的光纤传导到所述光谱仪后完成对透射光通量的分析计算;当在快门电机作用下反光板撤离光陷阱时,通过所述积分球顶部测试孔来采集散射光,经所述测试孔尾部的光纤传导到所述光谱仪后完成对散射光通量的分析计算。进而,通过控制单元所配备的软件计算出航天服头盔面窗的透光率、雾度。
60.为适应服装内部的狭小空间,所述积分球在满足光学性能测试(透光率、雾度)基础上进行了小型化设计,最终使得积分球直径φ60mm、进光口直径φ10mm,光陷阱开口直径φ9.5mm,实现了积分球空间体积小、自动快门、出口孔径精度高等特点,如图6。所述ccd选用了3.45um像元、2448
×
2048像素、global shutter(帧曝光)的高性能相机,并配以65mm变焦、2倍光学放大倍数的镜头,形成的“ccd 镜头”组可确保对头盔面窗光畸变、角偏差性能指标测试过程中视觉图像的捕捉和采集。为确保服装头盔面窗全程光学性能测量为非接触测量,所述距离传感器选用了光斑直径φ9μm、线性量程3mm、位移测量绝对误差0.75μm、光谱分辨率36nm的光谱共焦型传感器,用于测试过程中接收单元6的定位并起到防止仪器接触磕碰或划伤面窗的功能。所述ccd相机用对所述发射单元所属部件标靶板上的高精度点阵经舱外航天服头盔面窗后形成的新的点阵图像的采集,利用新点阵与标靶板点阵中对应点位的变化信息,从而通过控制单元所配备的软件计算出航天服头盔面窗的光畸变、角偏差。
61.所述运行机构5及信号接收单元6上安装的高精度共焦型光谱距离传感器,结合控
制单元上的专用软件算法,可对面窗空间曲面进行仿形扫描和离散化网格点重建,从而实现了对面窗上指定点或区域的光学性能测试。在曲面仿形扫描重建过程中,既可根据设定的区域边界及步长进行自动化的扫描重建,也可通过手动操作定位到面窗上采集点进行。
62.信号发射单元7安装在运行机构5的从动轴上,主要由“标靶板”、“准直透镜 标准c光源”共同组成,如图6。所述标靶板为大小40mm
×
40mm
×
2.3mm的平板玻璃片,其上印制有直径(偏差0.6μm)、圆心间距1.0mm(偏差0.5μm)黑圆点的高精度5
×
5点阵,该高精度点阵经舱外航天服头盔面窗后被所述信号接收单元捕捉采集,从而用于航天服头盔面窗的光畸变、角偏差测试。所述标靶板,与信号接收单元6上的ccd配套使用,完成对头盔面窗光畸变、角偏差的测试。所述“准直透镜 光源”中的光源为符合国际照明委员会(cie)1931年标准比色法测定要求的c光源,并通过前端的准直透镜把发散光变为平行光后,与信号接收单元6上的积分球配套使用完成对头盔面窗透光率、雾度的测试。所述接近传感器(接触端头设计有柔性接触面)用于测试过程中信号发射单元7的定位并起到防止仪器接触磕碰或划伤面窗的功能,以确保全程测量为非接触测量。
63.上述技术方案中的控制单元,为柜式结构,柜体上部为显示操作台面,柜体下部安装有工控机、光谱仪、距离传感器控制器。整个控制单元通过信号电缆与箱体1内部的运行机构5、信号接收单元6、信号发射单元7相联,通过“人机”交互控制软件进行整个设备的机构运行控制、激励的输入及信号采集处理、测试结果的存储和输出等。距离传感器控制器与距离传感器配合使用,距离传感器工作原理:距离传感器发射出一束宽光谱的复色光(呈白色),经距离传感器自身的色散镜头发生光谱色散后形成不同的单色光,每一个波长都对应一个到被测物体的距离。测量光射到物体表面被反射回来后,只有满足共焦条件的(反射)单色光可以通过距离传感器自身上的采集小孔、并经传感器末端光纤导入到距离传感器控制器,经距离传感器控制器感应分析反算出距离传感器镜头与被测物之间的测量距离。
64.控制单元光学性能测试数据处理及计算:
65.控制单元的“人机”交互控制软件中分别编译有透光率/雾度的算法及角偏差/光畸变的算法。
66.透光率/雾度测试,包括:信号发射单元“标准c光源 准直透镜”产生的平行光,不经过或经过舱外航天服头盔面窗后,由信号接收单元“积分球”前端“进光孔”进入积分球内部并被采集后,由“光纤”导入到“光谱仪(注:光谱仪置于控制单元机柜中)”分析得出入射光通量t1或t3、散射光通量t2或t4,该分析数据经控制单元的专用软件计算后即可得出舱外航天服头盔面窗的透光率、雾度。
67.光畸变/角偏差测试:信号发射单元“标靶板”上的5
×
5点阵,不经过或经过舱外航天服头盔面窗,被信号接收单元“ccd”采集后,经控制单元的专用软件对比计算后即可得出舱外航天服头盔面窗的光畸变、角偏差。
68.①
透光率/雾度
69.透光率/雾度按gjb 1253《透明材料透光度、雾度、色度试验方法》计算方法进行:透光率计算公式:
70.在不放置舱外航天服头盔面窗的情况下,开启信号发射单元的标准c光源、信号接收单元的积分球和光谱仪,通过调节使标准c光源发出的光线正好全部透过积分球前端进
光孔,开启积分球快门电机使得与快门电机连接的反光板盖住积分球光陷阱;由积分球顶部测试孔采集的光经光纤导入到光谱仪后并由光谱仪计算出光通量t1;当与快门电机连接的反光板撤离积分球光陷阱时,由积分球顶部测试孔采集的光经光纤导入到光谱仪后并由光谱仪计算出的光通量t3。放置舱外航天服头盔面窗的情况下,开启信号发射单元的标准c光源、信号接收单元的积分球和光谱仪,通过调节使标准c光源发出的光线正好全部透过积分球前端进光孔,开启积分球快门电机使得与快门电机连接的反光板盖住积分球光陷阱;由积分球顶部测试孔采集的光经光纤导入到光谱仪后并由光谱仪计算出光通量t2;当与快门电机连接的反光板撤离积分球光陷阱时,由积分球顶部测试孔采集的光经光纤导入到光谱仪后并由光谱仪计算出的光通量t4。
71.雾度计算公式:
72.式中,t1为总的入射光通量,t2为通过试样的透射光通总量,t3为仪器的散射光通量,t4为仪器和样品的散射光通量。
73.②
角偏差
74.角偏差按gjb503《飞机夹层玻璃通用试验方法》中“准直望远镜测量法”计算,角偏差计算公式如下:
[0075][0076]
其中,
[0077]
式中,ei为角偏差矢量绝对值(i为入射角度),单位:秒;
[0078]eix
为根据ccd抓拍到拍摄的原始点阵图像和新点阵图像,获取标靶板中心原点的中心oi偏离检测板中心x轴的角度偏差分量,参见图8;其中x1为oi点在x轴向的偏移量,单位mm d1为ccd镜头到面窗表面被测区域中心的直线距离,单位mm。e
iy
为根据ccd抓拍到拍摄的原始点阵图像和新点阵图像,获取标靶板中心原点的中心oi偏离检测板中心y轴的角度偏差分量,参见图中8中y1为oi点在y轴向的偏移量,单位mm。
[0079]
角偏差的测试流程包括:
[0080]
(1)未放置舱外航天服头盔面窗时,调整ccd与标靶板使标靶板上5
×
5点阵中心点位于ccd视野中心,ccd拍照采集标靶上5
×
5点阵的原始点阵图像;
[0081]
(2)放置航天服头盔面窗后,ccd拍照采集标靶上5
×
5点阵经航天服头盔面窗会后的新点阵图;
[0082]
(3)因面窗光学性能原因,新点阵图像上中心圆点位置相对于原始位置会有偏移变化;按公式计算出中心点位的角偏差矢量绝对值作为该测试点的光学角偏差值;
[0083]
(4)调整运行机构保持ccd与标靶板同步运动,当ccd视野中心与标靶板点阵中心点的连线穿过新选的面窗测试点时,进行ccd拍照。
[0084]
(5)返回步骤(3)直至完成所有测试点的光学角偏差值计算。
[0085]
③
光畸变
[0086]
光畸变按gjb503《飞机夹层玻璃通用试验方法》中“投影(逐点)测量法”测量计算,首先统计出x轴向最大偏移量max x和最小偏移量min x、y轴向最大偏移量max y和最小偏
移量min y,如图9,计算对应角偏差值θmax x、θmin x、θmax y、θmin y。得到x轴线上角偏差分量最大代数差值θmax x-θmin x,y轴线上角偏差分量最大代数差值θmax y-θmin y,取两者最大值作为试件光畸变值。θx就是放置面窗后通过ccd捕捉到的标靶板中心原点偏离原标靶板中心圆点在x轴的角度偏差分量e
ix
;θmax x,θmin x分别为角度偏差分量e
ix
的最大值和最小值;θmax y和θmin y分别为ccd相机拍摄到的oi偏离检测板中心y轴的角度偏差分量e
iy
的最大值和最小值。
[0087]
光畸变值测试过程包括:
[0088]
(1)未放置舱外航天服头盔面窗时,调整ccd与标靶板使标靶板上5
×
5点阵中心点位于ccd视野中心,ccd拍照采集标靶上5
×
5点阵的原始点阵图像;
[0089]
(2)放置航天服头盔面窗后,ccd拍照采集标靶上5
×
5点阵经航天服头盔面窗会后的新点阵图;
[0090]
(3)按照步长1mm,以上面步骤2的初始位置为中心,自动扫描3mm
×
3mm的给定区域,遍历所有采集点。每移动到新位置时,ccd自动拍照新的点阵图;针对所采集点阵图,软件自动识别、计算各张点阵图上中心点的x轴向偏移量及y轴向偏移量;分别获得x轴向、y轴向的最大偏移量和最小偏移量;计算出x轴向上角偏差最大值与最小值的差值θmax x-θmin x、y轴向上角偏差最大值与最小值的差值θmax y-θmin y,并以其中大的差值作为该测量处面窗的光畸变值.
[0091]
(4)复位到步骤(2)的初始位置,调整运行机构保持ccd与标靶板同步运动,当ccd视野中心与标靶板点阵中心点的连线穿过新选的面窗测试点时,返回步骤(2),直至完成面窗上所有测试点的光畸变测试计算。
[0092]
另一方面提供一种利用所述的舱外航天服头盔面窗光学性能综合测试装置进行光学性能综合测试的方法,包括如下步骤:
[0093]
1、启动光学性能综合测试装置,检查运行机构、光学仪器、控制单元等的信号输入/输出的导通性、机构运行的顺畅性。
[0094]
2、调试运行机构5在设备的左右中间对称位,将运行机构5上的主动轴、从动轴分离后退到合适位置,将主动轴上的信号接收单元6、从动轴上的信号发射单元7同样向后调整到合适位置,为被测服装在设备上的安装提供空间。
[0095]
2.1通过运行机构底座调整主动轴位置及旋转角度,使得主动轴信号接收单元上距离传感器的轴线与服装纵向中性面基本一致.
[0096]
2.2调整主动轴上信号接收单元的高度,使得距离传感器的轴线与面窗中心高度基本一致;
[0097]
2.3通过信号接收单元上的调节结构调整距离传感器与面窗之间间距到合适距离.
[0098]
2.4给定距离传感器左/右移动步长(1mm),即运行机构底座水平横y向移动步,,先水平方向行扫描面窗;行扫描完后再按照上/下移动步长(1mm)移动到新高度行,即信号接收单元在主动轴上的移动步长,完成新高度行的面窗水平扫描。
[0099]
3、将服装从上往下移动套住运行机构5的主动轴及其上信号接收单元6,最终需将服装安装固定在设备的安装座4上,并确保接口之间的密封性、连接可靠性,且整个安装过程中不得磕碰接触服装头盔面窗。
[0100]
4、对航天服头盔面窗内压力面窗扫描,由控制单元对所述航天服头盔面窗进行三维建模。距离传感器用于采集与舱外航天服头盔面窗之间的距离,实现对航天服头盔面窗内压力面窗的扫描,包括:
[0101]
4.1通过运行机构底座调整主动轴位置及旋转角度,使得主动轴信号接收单元上距离传感器的轴线与服装纵向中性面基本一致;
[0102]
4.2调整主动轴上信号接收单元的高度,使得距离传感器的轴线与面窗中心高度基本一致;
[0103]
4.3通过信号接收单元上的调节结构调整距离传感器与面窗之间间距到合适距离;
[0104]
4.4给定距离传感器左/右移动步长(1mm)(注:即运行机构底座水平横y向移动步长,见图3),先水平方向行扫描面窗;行扫描完后再按照上/下移动步长(1mm)移动到新高度行(注:即信号接收单元在主动轴上的移动步长),完成新高度行的面窗水平扫描。
[0105]
5、通过手动输入控制,将运行机构5的主动轴、从动轴相向前进到合适位置,在信号接收单元6、信号发射单元7上测距传感器的辅助基础上,将主动轴上信号接收单元6、从动轴上信号发射单元7相向接近前进调整到与面窗间距合适位置。
[0106]
6、通过手动输入信号逐步逼近法,精细调节信号发射单元7位置,确保其上发射光源正好能够全部进入信号接收单元6上积分球进光孔,从而确保反射端与采集端光学仪器的光轴共轴性,此时光轴所穿过的面窗点位即为初始点位或称为零点位。
[0107]
7、开展面窗零点位的透光率、雾度测试;注:点位位置、测试结果均由设备软件自动采集、计算生产。怎么调整发射和接收设备,测量入射光通量t1,通过舱外航天服头盔面窗的透射光通总量t2,仪器的散射光通量t3,仪器和舱外航天服头盔面窗的散射光通量t4;计算透光率雾度
[0108]
根据需求,自动或手动选择新的测试点,开展新点位的透光率、雾度性能测试。
[0109]
8、进行将信号接收单元6、信号发射单元7回复到初始点位或称为零点位;根据需要,启动信号接收单元6与主动轴之间的旋转电机,转换积分球与ccd相机的位置,将ccd相机调整到工作位;
[0110]
9、启动信号接收单元6ccd相机、信号发射单元7ccd电源,开展面窗零点位的光畸变、角偏差性能测试;注:点位位置、测试结果均由设备软件自动采集、计算生产。
[0111]
根据ccd采集模块抓拍图像,获取ccd抓拍到的oi偏离检测板中心x轴的角度偏差分量e
ix
,ccd抓拍到的oi偏离检测板中心y轴的角度偏差分量e
iy
,i为入射角度,计算角偏差基于ccd采集模块抓拍图像,统计出x轴向最大偏移量max x和最小偏移量min x、y轴向最大偏移量max y和最小偏移量min y,计算对应角偏差值θmax x、θmin x、θmax y、θmin y;得到x轴线上角偏差分量最大代数差值θmax x-θmin x,y轴线上角偏差分量最大代数差值θmax y-θmin y,取两者最大值作为光畸变值。
[0112]
根据需求,自动或手动选择新的测试点,开展新点位的光畸变、角偏差光学性能测试;
[0113]
10、将信号接收单元6、信号发射单元7回复到初始点位或称为零点位。
[0114]
11、通过安装座4上的气嘴4-1,对服装内部充气加压,并通过持续补气方式维持服装内部的稳定压力;
[0115]
12、重复上述7~9步骤,开展服装加压工作工况下头盔面窗的光学性能测试;
[0116]
13、航天服泄压,回复到未加压前状态;
[0117]
14、将运行机构5上的主动轴、从动轴分离后退到合适位置,将主动轴上的信号接收单元6、从动轴上的信号发射单元7同样向后调整到合适位置,为服装从设备上的撤离做好准备。
[0118]
15、先向上抽取移动服装,待运行机构5主动轴及其上信号接收单元6彻底从服装底部出来后,横向移动服装,完成服装撤场及回收。
[0119]
16、关闭控制单元,关闭各部件电源,关闭总电源,做好设备试验后的防护等措施。
[0120]
综上所述,本发明涉及一种舱外航天服头盔面窗光学性能综合测试装置及方法,测试装置底盘设置安装座,提供安装舱外航天服的密封接口;运行机构包括主动轴、从动轴和底座;主动轴通过转盘的转接与输出驱动轴连接,并设置在舱外航天服内;从动轴安装至转盘下表面的传动轴上,并设置在舱外航天服外部;信号发射单元安装至从动轴,信号接收单元安装至主动轴;控制单元控制运行机构,调整信号发射单元和信号接收单元的位置,基于信号接收单元传送的信号,测量舱外航天服头盔面窗光学性能参数。本发明实现了舱外航天服内部充注气压和不充注气压两种工况下的头盔面窗整体光学性能测试,包括透光率、雾度、角偏差、光畸变的测试;保证了产品验收交付的可靠性。
[0121]
应当理解的是,本发明的上述具体实施方式仅仅用于示例性说明或解释本发明的原理,而不构成对本发明的限制。因此,在不偏离本发明的精神和范围的情况下所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。此外,本发明所附权利要求旨在涵盖落入所附权利要求范围和边界、或者这种范围和边界的等同形式内的全部变化和修改例。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。