1.本发明涉及轴承打滑诊断预测技术领域,主要涉及一种面向打滑诊断的智能轴承系统及打滑诊断预测方法。
背景技术:
2.滚动轴承作为高速旋转机械的重要部件,其工作环境越来越恶劣,主要表现为轴承的dn值(轴承内圈内径d(mm)
×
内圈转速n(r/min))较高,致使轴承经常出现如打滑蹭伤、疲劳失效和运动失稳等故障,这其中比较常见的是轴承打滑故障,约占总故障数的34%左右。研究表明,轴承打滑大多发生在变载荷、转速以及润滑等的变工况下,但轴承打滑信号由于其信号相比其它故障信号更加微弱,更加容易被变工况或者别的噪声(未知冲击和谐波)淹没。结合上述特点,针对轴承打滑现象的诊断需要获取多源轴承实时运行状态信息和利用有效的数据处理方法相结合。
3.智能轴承是获取轴承实时运行多源状态信息的有效手段。智能轴承是在传统轴承的基础上集成不同用途而成的传感装置和调控装置,使其结合成为一体而形成独特的轴承结构单元,利用信息处理、自动控制等技术实现轴承运行状态实时在线监测、故障检测以及状态实时调控。现有技术中,邵毅敏等提出了一种基于嵌入式多参量传感器的智能轴承结构,该复合传感器包括2个微型振动加速度传感器、2个微型转速传感器和2个微型温度传感器,实现了对轴承运转过程中水平和垂直地面两方向的振动信号、轴承转速信号、内圈(轴)和外圈温度信号的采集。王方哲设计完成了一种集成振动系统,将传感器采集系统固定至轴承的外圈,使测试系统与轴承成为一体,从而获得较高的信号质量。王恒等设计了一种嵌入式智能轴承监测系统可以获取轴承振动加速度和温度信息,并利用卡尔曼滤波器进行故障诊断。相关研究尚未考虑应力应变以及轴承装配姿态角度信号的采集,而轴承打滑现象与运行过程的应力应变和姿态角度相关性极强。
4.此外轴承运行工况复杂,失效模式多变,而且监测数据中存在测量噪声随机干扰,导致打滑现象诊断预测结果不可避免地具有不确定性。因此,必须量化轴承打滑诊断预测过程中的不确定性。
技术实现要素:
5.发明目的:基于上述背景技术中存在的问题,本发明提供了一种面向打滑诊断的智能轴承系统及打滑诊断预测方法,能够实现对轴承运行状态的实时监测,同时利用随机变分推理对循环卷积神经网络的诊断预测不确定性进行量化,获得较好的打滑诊断、预测与控制效果。
6.技术方案:为实现上述目的,本发明采用的技术方案为:
7.一种面向打滑诊断的智能轴承系统,包括无线电能传输模块、电路板、滑环引电器和轴承模块;所述无线电能传输模块包括高频电源、发射线圈、和接收线圈;所述接收线圈固定安装于环形电路板内圈,由外部电能管理模块控制供电;所述电路板上设有电源模块、
中央处理器、信号采集模块、信号传输模块和若干传感器模块;所述轴承模块包括沿轴心依次向外设置的轴承内套圈、轴承内圈、轴承滚子、轴承外圈和轴承外套圈;所述轴承滚子沿端部外侧还设有轴承保持架;所述轴承内套圈和轴承内圈之间设有间隙,沿轴承内套圈圆周方向设置有若干均匀交叉分布的轴承内圈应变传感器和轴承内圈温度传感器;所述轴承外圈和轴承外套圈之间也设有间隙,沿轴承外圈圆周方向设置有若干均匀交叉分布的轴承外圈应变传感器和轴承外圈温度传感器;所述滑环引电器分别连接电路板和轴承模块;所述电路板固定连接于轴承外套圈上。
8.进一步地,所述无线电能传输模块中在发射线圈和接收线圈中间还设有中继线圈;各线圈均采用对集肤效应不敏感的利兹线,且线圈均采用圆柱形密绕方式进行绕线。
9.进一步地,所述滑环引电器转子侧固定安装于轴承内套圈上,并与轴承内圈应变传感器和轴承内圈温度传感器相连;滑环引电器定子侧固定安装于电路板上,通过导电线圈将采集到的轴承内圈温度和应变信息传输至信号采集模块和中央处理器,;轴承外圈温度和应变信息直接利用信号线传输至信号采集模块和中央处理器。
10.进一步地,所述传感器模块包括振动加速度传感器、温度湿度传感器、九轴姿态角度传感器、电涡流转速传感器;各传感器模块将采集的信息输入至信号采集模块和中央处理器,并通过信号传输模块将采集到的信息传输至数据管理模块。
11.进一步地,所述电涡流转速传感器的测点中心与轴承滚子位于同一水平线上。
12.进一步地,所述振动加速度传感器采用adxl355型,所述温度湿度传感器采用sht20型,所述九轴姿态角度传感器采用wt931型。
13.一种采用上述任一项所述的面向打滑诊断的智能轴承系统的打滑诊断预测方法,包括以下步骤:
14.步骤s1、数据管理模块采集智能轴承系统输出的多源信息集合;
15.步骤s2、通过数据预处理模块对多源信息集合依次进行数据清洗、多尺度深层特征表征和特征降维处理,最后进行多源融合操作;
16.步骤s3、构建循环卷积神经网络,进行轴承打滑诊断预测;
17.步骤s4、基于不确定性量化的打滑诊断与预测模块利用随机变分推理对上述循环卷积神经网络的诊断预测不确定性进行量化;
18.步骤s5、自主调控模块调节轴承转速与润滑状态,避免打滑。
19.进一步地,所述步骤s3中同步采集轴承保持架转速与轴承振动信号,根据采集到的轴承保持架转速和轴承内圈转速计算轴承保持架打滑率,计算公式如下:
[0020][0021]
其中,ωc是轴承保持架实际转速;ω
cm
是轴承保持架理论转速;χ是轴承保持架打滑率;其中轴承保持架理论转速ω
cm
满足
[0022][0023]
其中,rw是轴承滚子半径;rm是轴承节圆半径;ωi是轴承内圈转速;
[0024]
利用循环连接和门控机制构建循环卷积神经网络;使用h
×1×
s的多通道时间序
列数据作为网络输入;其中h是每个传感器序列的长度;s是传感器个数;然后使用m个循环卷积层和池化层从输入数据中自动提取深层特征,并捕获不同打滑状态之间的时间依赖性;对于第i个循环卷积层(i=1,2,...,m),所有卷积核都有相同的参数设置;对于前m-1个池化层,使用最大池化函数执行降采样操作;对于最后第m个池化层,使用全局最大池化操作执行降采样操作;第m个循环卷积层学习到的高层次表征转换为向量并输入到n个全连接层中。
[0025]
进一步地,所述步骤s4中,将循环卷积神经网络视作一个具有随机变量ω的概率模型,且ω服从高斯先验分布;随机变量ω包括循环卷积层中的卷积核和偏置:
[0026][0027]
以及全连接层中的权值和偏置
[0028][0029]
其中,ω
rcl
是循环卷积层中需要优化的随机变量集合;ω
fcl
是全连接层中需要优化的随机变量集合;和是卷积核;和是偏置项;m表示循环卷积层的个数;n表示全连接层个数;
[0030]
给定由r个输入样本和输出样本组成的训练数据集,根据贝叶斯定理,随机变量ω的后验分布表示为:
[0031][0032]
其中,p(ω|u,o)表示ω的后验分布;p(ou,ω)表示u和ω同时发生后o的条件概率;p(ω)表示ω的先验概率;p(ou)表示已知u发生后o的条件概率;
[0033]
根据式(1)对于新的输入u
*
,通过下式(4)获得预测分布:
[0034]
p(o
*
|u
*
,u,o)=∫p(o
*
|u
*
,ω)p(ω|u,o)dω
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0035]
其中,u
*
表示新的输入;o
*
表示新的输出;p(o
*
|u
*
,ω)表示u
*
和ω同时发生后o
*
的条件概率;p(o
*
|u
*
,u,o)表示u
*
、u和o同时发生后o
*
的条件概率;
[0036]
利用变分推理近似计算后验分布p(ωu,o);首先定义近似变分分布q(ω)分解权值与偏置,即:
[0037][0038]
其中,q(
·
)代表每个权值和偏置的近似变分分布;
[0039][0040][0041]
其中,π
l
∈[0,1]是提前给定的概率;和分别为权值和偏置的变分参数;τ是模型精度;i为单位矩阵;n(
·
)表示关于变量的函数;用w
l
和b
l
表示第l个权值层的权值和偏置,其中l=1,2,...,m n;
[0042]
通过最小化近似变分分布和后验分布的kulback-leibler散度kl(q(ω)||p(ω|u,o))获得近似的预测分布:
[0043]
p(o
*
|u
*
,u,o)≈∫p(o
*
|u
*
,ω)q
*
(ω)dω
ꢀꢀ
(8)
[0044]
其中,q
*
(ω)为使kl散度最小化时ω的近似变分分布;最小化kl散度等效于最大化边际似然函数下界,因此循环卷积神经网络的目标函数为:
[0045][0046]
其中,p(or|ur,ω)是ur和ω同时发生后or的条件概率;kl(q(ω)||p(ω))表示q(ω)和p(ω)的相对熵;对式(7)第一项进行蒙特卡洛积分求解,获得最终目标函数如式(10):
[0047][0048]
其中,是损失函数;是神经网络输出;是第r个样本随机变量估计值;c是先验的长度系数;根据式(10)可知预测不确定性可以通过在每个循环卷积层和全连接层中添加一个概率为π的dropout和权值衰退系数为λ的l2正则项进行量化,等价于式(11):
[0049][0050]
其中,是神经网络第r个输出值;在变循环神经网络中,通过随机梯度下降法使目标函数(11)最小化。
[0051]
一种采用上述任一项所述面向打滑诊断的智能轴承系统的设计方法,包括以下步骤:
[0052]
步骤l1、利用nastran计算轴承滚子的接触刚度,仅建立下半滚子部分与轴承外圈之间的接触模型,并将滚子上表面所有节点与滚子中心点做多点约束刚性连接,在连接点上施加不同径向载荷;
[0053]
步骤l2、分别利用nastran和adams分析轴承内圈应变传感器和轴承外圈应变传感器安装位置与安装个数对应力测量和轴承整体运动状态的影响;
[0054]
步骤l3、利用comsol研究在无线电能传输模块增加中继线圈以及改变接收线圈偏转角度对电能传输效率的影响。
[0055]
有益效果:
[0056]
(1)本发明设计的智能轴承系统利用无线电能传输技术为智能轴承系统供电,在无线电能传输模块中加入中继线圈,延长有效电能传输距离,提高电能传输效率;并研究结合轴承实际工作环境测试线圈偏转角度对电能传输效率的影响。
[0057]
(2)本发明针对轴承打滑信号微弱的特点,在传统采集振动加速度、温度和转速等信号的基础上,进一步采集了与打滑现象密切相关的轴承内外圈应力应变和温度湿度信号等多源信息,更能充分反映轴承打滑现象下轴承的工作状态。
[0058]
(3)本发明通过安装电涡流传感器测量轴承保持架转速,实现在考虑润滑状态下轴承保持架转速的精确测量。
[0059]
(4)本发明利用滑环引电器测量高速旋转的轴承内圈应力应变以及温度信号,解决了旋转部件状态测量问题。
[0060]
(5)本发明利用随机变分推理对循环卷积神经网络的诊断预测不确定性进行量化,提高了打滑诊断预测的可靠性。
附图说明
[0061]
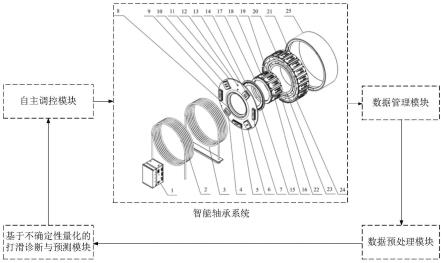
图1为本发明提供的智能轴承系统结构示意图;
[0062]
图2为本发明提供的轴承打滑诊断预测流程图;
[0063]
图3为本发明实施例中轴承打滑率变化曲线图;
[0064]
图4为本发明实施例中轴承打滑诊断结果图;
[0065]
图5为本发明实施例中轴承打滑预测结果图;
[0066]
图6为本发明实施例中轴承滚子接触刚度仿真图;
[0067]
图7为本发明实施例中轴承外圈应变传感器在不同安装个数下的仿真分析;
[0068]
图8为本发明实施例中中继线圈对电能传输效率的影响;
[0069]
图9为本发明实施例中线圈偏转角度对电能传输效率的影响。
[0070]
附图标记说明:
[0071]
1-高频电源;2-发射线圈;3-中继线圈;4-电源模块;5-振动加速度传感器;6-中央处理器;7-温度湿度传感器;8-接收线圈;9-九轴姿态角度传感器;10-信号采集模块;11-电路板;12-电涡流转速传感器;13-信号传输模块;14-导电线圈;15-滑环引电器;16-轴承内圈应变传感器;17-轴承内套圈;18-轴承内圈温度传感器;19-轴承滚子;20-轴承外圈应变传感器;21-轴承外圈温度传感器;22-轴承外圈;23-轴承内圈;24-轴承保持架;25-轴承外套圈。
具体实施方式
[0072]
下面结合附图对本发明作更进一步的说明。
[0073]
本发明首先设计了一种面向打滑诊断的智能轴承系统,具体结构如图1所示,包括无线电能传输模块、电路板11、滑环引电器15和轴承模块。无线电能传输模块包括高频电源1、发射线圈2、和接收线圈8。无线电能传输模块中在发射线圈2和接收线圈8中间还设有中继线圈3。各线圈均采用对集肤效应不敏感的利兹线,且线圈均采用圆柱形密绕方式进行绕线。接收线圈8固定安装于环形电路板11内圈,由外部电能管理模块控制供电。
[0074]
电路板11上设有电源模块4、中央处理器6、信号采集模块10、信号传输模块13和若干传感器模块。传感器模块包括振动加速度传感器5、温度湿度传感器7、九轴姿态角度传感器9、电涡流转速传感器12。各传感器模块将采集的信息输入至信号采集模块10和中央处理器6,并通过信号传输模块13将采集到的信息传输至数据管理模块。
[0075]
本实施例中振动加速度传感器5采用adxl355型,温度湿度传感器7采用sht20型,九轴姿态角度传感器9采用wt931型。此外电涡流转速传感器12的测点中心与轴承滚子位于同一水平线,避免在轴承旋转过程中轴承保持架24遮挡电涡流转速传感器12探头,实现在有油污影响的状态下准确测量保持架转速。
[0076]
轴承模块包括沿轴心依次向外设置的轴承内套圈17、轴承内圈23、轴承滚子19、轴
承外圈22和轴承外套圈25。轴承滚子19沿端部外侧还设有轴承保持架24。轴承内套圈17和轴承内圈23之间设有间隙,沿轴承内套圈17圆周方向设置有若干均匀交叉分布的轴承内圈应变传感器16和轴承内圈温度传感器18。轴承外圈22和轴承外套圈25之间也设有间隙,沿轴承外圈22圆周方向设置有若干均匀交叉分布的轴承外圈应变传感器20和轴承外圈温度传感器21。滑环引电器15分别连接电路板11和轴承模块。电路板11固定连接于轴承外套圈25上。
[0077]
滑环引电器15分别连接电路板11和轴承模块。其中转子侧固定安装于轴承内套圈17上,并与轴承内圈应变传感器16和轴承内圈温度传感器18相连。滑环引电器15定子侧固定安装于电路板11上,通过导电线圈14将采集到的轴承内圈温度和应变信息传输至信号采集模块10和中央处理器6;轴承外圈温度和应变信息直接利用信号线传输至信号采集模块10和中央处理器6。
[0078]
基于上述智能轴承系统,本发明提供了相应的打滑诊断预测方法,如图2所示,包括以下步骤:
[0079]
步骤s1、数据管理模块采集智能轴承系统输出的多源信息集合。
[0080]
步骤s2、通过数据预处理模块对多源信息集合依次进行数据清洗、多尺度深层特征表征和特征降维处理,最后进行多源融合操作。
[0081]
步骤s3、构建循环卷积神经网络,进行轴承打滑诊断预测。
[0082]
根据采集到的轴承保持架转速和轴承内圈转速计算轴承保持架打滑率,计算公式如下:
[0083][0084]
其中,ωc是轴承保持架实际转速。ω
cm
是轴承保持架理论转速。χ是轴承保持架打滑率。其中轴承保持架理论转速ω
cm
满足:
[0085][0086]
其中,rw是轴承滚子半径。rm是轴承节圆半径。ωi是轴承内圈转速。轴承打滑率变化曲线如图3所示。
[0087]
利用循环连接和门控机制构建循环卷积神经网络。使用h
×1×
s的多通道时间序列数据作为网络输入。其中h是每个传感器序列的长度。s是传感器个数。然后使用m个循环卷积层和池化层从输入数据中自动提取深层特征,并捕获不同打滑状态之间的时间依赖性。对于第i个循环卷积层(i=1,2,...,m),所有卷积核都有相同的参数设置。对于前m-1个池化层,使用最大池化函数执行降采样操作。对于最后第m个池化层,使用全局最大池化操作执行降采样操作。第m个循环卷积层学习到的高层次表征转换为向量并输入到n个全连接层中。
[0088]
步骤s4、基于不确定性量化的打滑诊断与预测模块利用随机变分推理对上述循环卷积神经网络的诊断预测不确定性进行量化。
[0089]
将循环卷积神经网络视作一个具有随机变量ω的概率模型,且ω服从高斯先验分布。随机变量ω包括循环卷积层中的卷积核和偏置:
[0090][0091]
以及全连接层中的权值和偏置
[0092][0093]
其中,ω
rcl
是循环卷积层中需要优化的随机变量集合。ω
fcl
是全连接层中需要优化的随机变量集合。和是卷积核。和是偏置项。m表示循环卷积层的个数。n表示全连接层个数。
[0094]
给定由r个输入样本和输出样本组成的训练数据集,根据贝叶斯定理,随机变量ω的后验分布表示为:
[0095][0096]
其中,p(ω|u,o)表示ω的后验分布。p(o|u,ω)表示u和ω同时发生后o的条件概率。p(ω)表示ω的先验概率。p(o|u)表示已知u发生后o的条件概率。
[0097]
根据式(1)对于新的输入u
*
,通过下式(4)获得预测分布:
[0098]
p(o
*
|u
*
,u,o)=∫p(o
*
|u
*
,ω)p(ω|u,o)dω
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0099]
其中,u
*
表示新的输入。o
*
表示新的输出。p(o
*
|u
*
,ω)表示u
*
和ω同时发生后o
*
的条件概率。p(o
*
|u
*
,u,o)表示u
*
、u和o同时发生后o
*
的条件概率。
[0100]
利用变分推理近似计算后验分布p(ω|u,o)。首先定义近似变分分布q(ω)分解权值与偏置,即:
[0101][0102]
其中,q(
·
)代表每个权值和偏置的近似变分分布。
[0103][0104][0105]
其中,π
l
∈[0,1]是提前给定的概率。和分别为权值和偏置的变分参数。τ是模型精度。i为单位矩阵。n(
·
)表示关于变量的函数。用w
l
和b
l
表示第l个权值层的权值和偏置,其中l=1,2,...,m n。
[0106]
通过最小化近似变分分布和后验分布的kulback-leibler散度kl(q(ω)||p(ω|u,o))获得近似的预测分布:
[0107]
p(o
*
|u
*
,u,o)≈∫p(o
*
|u
*
,ω)q
*
(ω)dω
ꢀꢀ
(8)
[0108]
其中,q
*
(ω)为使kl散度最小化时ω的近似变分分布。最小化kl散度等效于最大化边际似然函数下界,因此循环卷积神经网络的目标函数为:
[0109][0110]
其中,p(or|ur,ω)是ur和ω同时发生后or的条件概率。kl(q(ω)||p(ω))表示q
(ω)和p(ω)的相对熵。对式(7)第一项进行蒙特卡洛积分求解,获得最终目标函数如式(10):
[0111][0112]
其中,是损失函数。是神经网络输出。是第r个样本随机变量估计值。c是先验的长度系数。根据式(10)可知预测不确定性可以通过在每个循环卷积层和全连接层中添加一个概率为π的dropout和权值衰退系数为λ的l2正则项进行量化,等价于式(11):
[0113][0114]
其中,是神经网络第r个输出值。在变循环神经网络中,通过随机梯度下降法使目标函数(11)最小化。轴承打滑诊断结果如图4所示,轴承打滑预测结果如图5所示。
[0115]
步骤s5、自主调控模块调节轴承转速与润滑状态,避免打滑。
[0116]
下面提供一种上述智能轴承系统的设计方法,具体包括以下步骤:
[0117]
步骤l1、利用nastran计算轴承滚子的接触刚度,仅建立下半滚子部分与轴承外圈之间的接触模型,并将滚子上表面所有节点与滚子中心点做多点约束刚性连接,在连接点上施加不同径向载荷。接触刚度计算结果如下表1所示:
[0118]
表1不同载荷下滚子与内外圈的接触位移和刚度计算结果
[0119][0120]
具体计算结果如图6所示。
[0121]
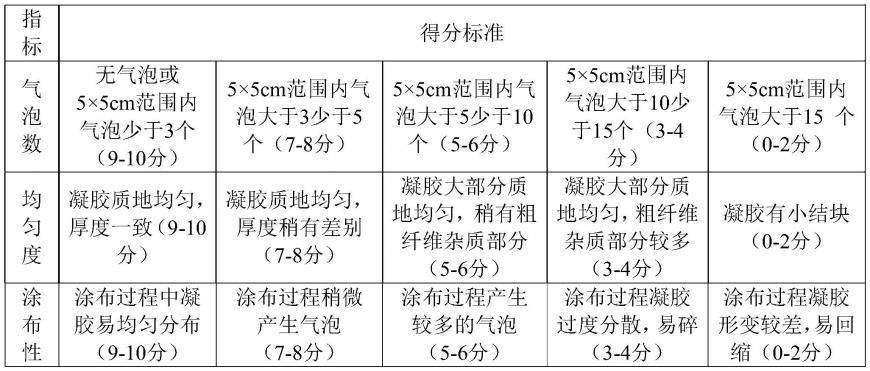
步骤l2、由于在轴承内外圈分别切割安装若干应变传感会改变轴承本身动力学特性,评估应变传感器测量效果和对轴承运行带来的影响大小十分必要。本实施例分别利用nastran和adams分析轴承内圈应变传感器和轴承外圈应变传感器安装位置与安装个数对应力测量和轴承整体运动状态的影响。不同轴承外圈应变传感器安装个数测量效果如下表2所示:
[0122]
表2轴承外圈应变传感器不同安装个数与测量效果
[0123][0124]
图7展示了不同轴承外圈应变传感器安装个数应变分析结果。
[0125]
步骤l3、利用comsol研究在无线电能传输模块增加中继线圈以及改变接收线圈偏转角度对电能传输效率的影响。
[0126]
由于无线电能传输技术受到系统传输距离的限制,因此本实施例增加中继线圈来保证传输效率。通过已知的线圈参数可在comsol中建立系统仿真模型,通过对比同一位置接收线圈上某定点的磁通密度模的大小评判加入中继线圈的作用。影响无线电能传输系统效率的主要因素是线圈之间的耦合系数,通过分析不同传输距离变化以及有无中继线圈对耦合系数的影响进行电能传输效果对比,如图8所示。由于实际工况中存在线圈偏转角度的影响,因此基于仿真软件研究了接收线圈与中继线圈之间耦合系数随偏转角度的变化曲线图,结果如图9所示。
[0127]
以上所述仅是本发明的优选实施方式,应当指出:对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。