基于dr设备的三维图像的采集方法和系统
技术领域
1.本技术实施例涉及图像技术领域,尤其涉及一种基于dr设备的三维图像的采集方法和系统。
背景技术:
2.通过dr(digital radiography,直接数字化x射线摄影)系统拍摄待检器官的x光影像,已经成为医院放射科必备的技术之一。
3.现有技术中,通过dr系统对待检器官连续多角度透视,采集图像,利用三维重建技术生成三维图像,但是由于dr系统的探测器的成像范围的限制,限制了重建后三维图像的范围,导致在需要成像范围较大的应用场景,如对全脊柱、双下肢等成像时,无法完成对待检器官的完整成像。
技术实现要素:
4.本技术实施例提供一种基于dr设备的三维图像数据采集方法和系统,可解决dr系统因探测器的成像范围有限,而限制成像范围的问题。
5.本技术实施例一方面提供了一种基于dr设备的三维图像数据采集方法,包括:根据预先确定的三维图像的拍摄范围,确定拍摄模块的多个拍摄位置;
6.控制所述拍摄模块在每个所述拍摄位置分别采集拍摄对象的二维图像;
7.获取所述拍摄模块的每个所述拍摄位置的位置信息,以及获取所述拍摄对象所在的旋转站台的旋转角度信息,以将所述二维图像与所述拍摄位置信息以及所述旋转角度信息相对应,按照预设建立模型建立所述二维图像对应的三维图像。
8.本技术实施例一方面提供了一种基于dr设备的三维图像数据采集系统,包括:主控台、拍摄模块和dr处理模块;
9.所述主控台,用于根据预先确定的三维图像的拍摄范围,确定所述拍摄模块的多个拍摄位置;
10.还用于控制所述拍摄模块在每个所述拍摄位置分别采集拍摄对象的二维图像,并将所述二维图像发送给所述dr处理模块;
11.所述dr处理模块用于获取所述拍摄模块的每个所述拍摄位置的位置信息,以及获取所述拍摄对象所在的旋转站台的旋转角度信息,以将所述二维图像与所述拍摄位置信息以及所述旋转角度信息相对应,按照预设建立模型建立所述二维图像对应的三维图像。
12.从上述本技术各实施例可知,根据预先确定的三维图像的拍摄范围,确定拍摄模块的多个拍摄位置,控制拍摄模块在每个拍摄位置分别采集拍摄对象的二维图像,获取拍摄模块在每个拍摄位置的位置信息,以及获取该拍摄对象所在的旋转站台的旋转角度信息,将该二维图像与拍摄位置以及旋转角度相对应,基于二维图像建立三维图像,可通过拼接多个拍摄位置拍摄的二维图像扩大重建三维图像的拍摄范围,增加dr数据采集的适用场景,同时提高采集的自动化程度。
附图说明
13.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作一简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
14.图1为本技术实施例提供的基于dr设备的三维图像数据采集方法中dr设备的结构示意图;
15.图2为本技术实施例提供的基于dr设备的三维图像数据采集方法的流程示意图;
16.图3为本技术实施例提供的基于dr设备的三维图像数据采集方法中在多个拍摄位置拍摄图像的示意图;
17.图4为本技术实施例提供的基于dr设备的三维图像数据采集系统的结构示意图。
具体实施方式
18.为使本技术实施例的目的、技术方案和优点更加清楚,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
19.本技术实施例提供了一种基于dr设备的三维图像数据采集方法和系统,用于控制dr设备多次在多个位置采集构建三维图像的二维图像,通过二维图像以及二维图像对应的拍摄位置和角度数据可构建三维图像,该采集方法和系统可以解决dr设备在负重位功能中采样的单段图像的z轴范围不足的问题。
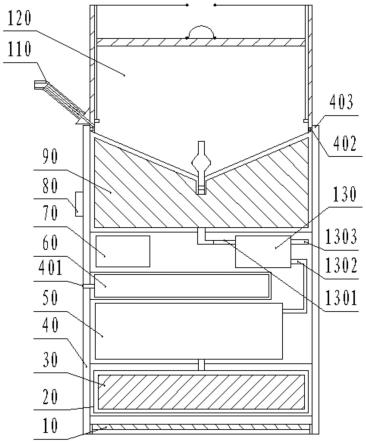
20.参见图1,图1为基于dr设备的三维图像数据采集方法中dr设备的结构示意图,该dr设备包括:
21.dr处理模块10、旋转站台20、主控台30、机架40、x射线高压发生器50、 x射线球管60和平板探测器70;
22.其中,dr处理模块10设置在终端中,连接旋转站台20、主控台30和平板探测器70;主控台30还连接机架40和x射线高压发生器50;机架40还连接x射线球管60和平板探测器70;x射线高压发生器50还连接x射线球管60 和平板探测器70。
23.被采集图像的人员站立在旋转站台20上,旋转站台20用于旋转该人员,并将旋转站台20的转盘的角度数据上传给dr处理模块10,该角度数据可标识旋转位置,用于为三维图像的重建提供位置信息支撑;
24.主控台30用于通过控制机架40来控制平板探测器70和x射线球管60进行运动,制x射线高压发生器50曝光,以及用于将平板探测器70和x射线球管60的位置数据发送给dr处理模块10;
25.机架40用于响应主控台30的控制操作,控制平板探测器70和x射线球管 60运动,并通过电位器对x射线球管60的位置和平板探测器70位置进行采样,并将采样数据反馈给主控台30,该采样数据即为x射线球管60的位置数据和平板探测器70的位置数据,x射线球管60和平板探测器70相对位置和角度固定,可以作为一个整体对拍摄对象进行x光图像的拍摄、采集,这些位置数据用于在重建三维图像时辅助三维图像拼接;
26.x射线高压发生器50用于实现和平板探测器70的的曝光出图步骤的时序同步,x射线高压发生器50和平板探测器70同步后,控制x射线球管60发出 x射线,x射线高压发生器50还用于和主控台30进行信息交互;
27.x射线球管60用于发出x射线;
28.平板探测器70用于采集人体的x光二维图像,并上传给dr处理模块10。
29.dr处理模块10中内置dr处理软件,dr处理模块10用于接收平板探测器70上传的采集的二维图像,获取主控台30发送的x射线球管60和平板探测器70的位置数据,获取旋转站台20上传得旋转角度数据,并根据该位置数据和该旋转角度数据,重建基于二维图像的三维图像。
30.参见图2,图2为本技术实施例提供的基于图2中的dr设备的三维图像数据采集方法的流程示意图,该采集方法包括:
31.s201、根据预先确定的三维图像的拍摄范围,确定拍摄模块的多个拍摄位置;
32.dr处理模块根据预先确定的三维图像的拍摄范围,确定拍摄模块的多个拍摄位置,该三维图像的拍摄范围具体可以是拍摄对象的z轴方向上的拍摄范围,多个拍摄位置是在z轴方向上的不同位置,通过拍摄模块在该多个拍摄位置拍摄的图像可以拼接成该三维图像的拍摄范围。
33.拍摄模块包括x射线球管和平板探测器,x射线球管发出x射线,平板探测器基于x射线采集图像,平板探测器拍摄的是二维图像,三维图像是根据二维图像建立的,三维图像的拍摄范围和二维图像的拍摄范围相同,均指所拍摄的拍摄对象的部位范围。
34.在步骤s201之前确定该三维图像的拍摄范围:
35.主控台控制该拍摄模块先后移动到拍摄起点位置和拍摄终点位置,dr处理模块响应于选择操作,通过选择该拍摄起点位置和拍摄终点位置得到该三维图像的拍摄范围,该拍摄起点位置和该拍摄终点位置分别对应该拍摄模块拍摄该拍摄对象的起始位置和截止位置;主控台通过电位器获取该拍摄起点位置和该拍摄终点位置,并将该拍摄起点位置和该拍摄终点位置之间的范围确定为该三维图像的拍摄范围。
36.具体地,dr处理模块设置在终端内,dr处理模块运行dr处理软件,dr 处理软件的界面显示在该终端的显示屏上,用户可以通过触屏或鼠标、键盘等输入方式选择拍摄起点位置和拍摄终点位置。
37.进一步地,医生通过操控主控台来控制拍摄模块,拍摄模块被控制运行到该拍摄起点位置,该拍摄起点位置对应该拍摄模块拍摄该拍摄对象的起始位置,例如被拍摄人员的颈部,用户在dr处理软件中将该位置设置为拍摄起点位置;拍摄模块被控制运行到该拍摄终点位置,拍摄终点位置对应该拍摄模块拍摄该拍摄对象的截止位置,例如该被拍摄人员的腿部,用户在dr处理软件中将该位置设置为拍摄终点位置,这样,dr处理模块获取到了该拍摄起点位置和该拍摄终点位置。
38.机架上的电位器采集到拍摄模块的拍摄起点位置和拍摄终点位置,将该拍摄起点位置和该拍摄终点位置上传给主控台,主控台根据该拍摄起点位置和该拍摄终点位置计算得到该三维图像的拍摄范围。
39.需要说明的是,在确定该三维图像的拍摄范围之前,dr软件切换到三维图像拼接部位后,基于dr设备的三维图像数据采集开启负重位拼接功能,负重位站台也即旋转站台
初始化并实现位置归零,x射线球管和平板探测器实现一键对中,成为相对位置固定的一个整体,作为拍摄模块采集拍摄目标的二维图像。
40.步骤s201根据预先确定的三维图像的拍摄范围,确定拍摄模块的多个拍摄位置包括:根据三维图像的拍摄范围和该拍摄模块的最大拍摄区域,计算该拍摄范围所需拍摄次数以及每次拍摄时该拍摄模块的拍摄位置。
41.具体地,根据该拍摄范围和该拍摄模块的最大拍摄区域确定最少拍摄次数,拍摄范围为l,最大拍摄区域为maxroi,则最少拍摄次数i=l/maxroi,结果为整数,则i取值即为该结果;结果不为整数,则i取值为该结果的整数部分加1。该最少拍摄次数是指更换多个位置拍摄该最少拍摄次数后,在各位置获得的图像可以拼接出该拍摄范围的图像,实际拍摄次数可以多于该最少拍摄次数,但是不能少于该最少拍摄次数,少于该最少拍摄次数则无法完整拼接出该拍摄范围的图像。
42.该最大拍摄区域为该拍摄模块能够拍摄的最大拍摄区域,为了拍摄图像清晰,该拍摄模块在实际应用中拍摄区域小于该最大拍摄区域。
43.根据该拍摄范围l、该最少拍摄次数i和相邻拍摄区域的重叠区域s,确定该拍摄模块的本次拍摄区域(roi,region of interest),本次拍摄区域即为在上述实际应用中拍摄区域,为二维图像和三维图像要采集的拍摄目标的区域,该拍摄模块的本次roi小于该最大拍摄区域,且本次roi符合束光器的要求,束光器安装于x线管组件管套输出窗前方,可控制x射线球管输出线的照射区域。计算该拍摄模块的本次roi的公式如下:
44.roi=(l s(i-1))/i;
45.roi≤maxroi
46.其中,s为已知量。
47.根据该本次roi和重叠区域s,确定每个拍摄位置之间的步进距离step,公式如下:
48.step=roi-s;
49.根据该拍摄起点位置x、该本次roi、步进距离step和拍摄次数i,确定每个拍摄位置k,该拍摄位置k是平板探测器的曝光位置,计算公式如下:
50.k(i)=x-roi/2-step*i;
51.其中,i从1开始递增,每次递增值为1。
52.按照平板探测器的拍摄区域,无法一次拍摄全拍摄范围l,通过上述确定拍摄位置的方法,在拍摄范围l的z轴方向上确定多个拍摄位置,将拍摄范围l 均分为多段拍摄,每个拍摄位置拍摄一次,即,在每个拍摄位置x射线球管发射x射线,对应地,平板探测器采集一次图像,并将在多个拍摄位置拍摄的二维图像进行拼接,便可得到拍摄范围l的完整图像。
53.参见图3,图3为将拍摄范围l分为三段拍摄的示意图,即,在拍摄起点位置和拍摄终点位置之间再确定一个拍摄位置,在这三个拍摄位置x射线球管分别发送x射线,对应地,平板探测器进行三次拍摄。
54.s202、控制该拍摄模块在每个该拍摄位置分别采集拍摄对象的二维图像;
55.主控台控制该拍摄模块每到一个拍摄位置,采集一次拍摄对象的二维图像,每个拍摄位置采集预设数量的二维图像,例如350张二维图像。
56.s203、获取该拍摄模块的每个拍摄位置的位置信息,以及获取该拍摄对象所在的旋转站台的旋转角度信息;
57.主控台控制该拍摄模块依次运行到各拍摄位置,各拍摄位置包括拍摄起点位置、拍摄终点位置,以及拍摄起点位置和拍摄终点位置之间的每个拍摄位置,便将每个所述拍摄位置的位置信息发送给dr处理模块。
58.旋转站台转动并将旋转角度信息实时发送给dr处理模块,x线高压发生器开始工作,x线球管发出x射线,平板探测器采集拍摄对象的透视的二维图像,并将二维图像传给dr处理模块。
59.s204、将该二维图像与该拍摄位置信息以及该旋转角度信息相对应,以按照预设建立模型,建立该二维图像对应的三维图像。
60.dr处理模块将该二维图像的每一帧图像与拍摄模块的拍摄位置和旋转站台的旋转角度相对应,用于按照预设建立模型建立该二维图像的三维图像,该建立模型为现有的根据二维图像建立三维图像的处理模型,此处不作具体的限定。
61.进一步地,在一个该拍摄位置采集预设数量的二维图像后,控制该拍摄模块停止采集该二维图像,并控制该旋转站台的位置归零;
62.控制该拍摄模块移动到下一个该拍摄位置,继续采集该二维图像,该旋转站台不停止旋转,继续相dr处理模块上传旋转角度信息。
63.本实施例中,根据预先确定的三维图像的拍摄范围,确定拍摄模块的多个拍摄位置,控制拍摄模块在每个拍摄位置分别采集拍摄对象的二维图像,获取拍摄模块在每个拍摄位置的位置信息,以及获取该拍摄对象所在的旋转站台的旋转角度信息,将该二维图像与拍摄位置以及旋转角度相对应,基于二维图像建立三维图像,可通过拼接多个拍摄位置拍摄的二维图像扩大重建三维图像的拍摄范围,增加dr数据采集的适用场景,同时提高采集的自动化程度。
64.参见图4,图4为本技术实施例中基于dr设备的三维图像数据采集系统的结构示意图,该系统包括:
65.主控台100、拍摄模块200和dr处理模块300;
66.dr处理模块300设置在一个终端中,该终端可以是pc机也可以是移动终端。
67.主控台100连接拍摄模块200和dr处理模块300,dr处理模块300也连接拍摄模块200。
68.主控台100即为前述图1所示的主控台30,拍摄模块200包括前述图1所示的x射线球管60和平板探测器70,dr处理模块300即为前述图1所示的 dr处理模块10。
69.主控台100,用于根据预先确定的三维图像的拍摄范围,确定拍摄模块200 的多个拍摄位置;
70.还用于控制拍摄模块200在每个拍摄位置分别采集拍摄对象的二维图像,并将二维图像发送给dr处理模块300;
71.dr处理模块300用于获取拍摄模块200的每个拍摄位置的位置信息,以及获取拍摄对象所在的旋转站台的旋转角度信息,以将二维图像与拍摄位置信息以及旋转角度信息相对应,按照预设建立模型建立二维图像对应的三维图像。
72.主控台100还用于被控制将拍摄模块200先后移动到拍摄起点位置和拍摄终点位置,拍摄起点位置和拍摄终点位置分别对应拍摄模块200拍摄拍摄对象的起始位置和截止位置;
73.dr处理模块300,响应于选择操作,通过选择拍摄起点位置和拍摄终点位置得到三维图像的拍摄范围;
74.主控台100还用于通过电位器获取拍摄起点位置和拍摄终点位置,并将拍摄起点位置和拍摄终点位置之间的范围确定为三维图像的拍摄范围。
75.主控台100,还用于根据三维图像的拍摄范围和拍摄模块200的最大拍摄区域,计算拍摄范围所需拍摄次数以及每次拍摄时拍摄模块200的拍摄位置。
76.主控台100,还用于根据拍摄范围和拍摄模块200的最大拍摄区域,确定最少拍摄次数;
77.根据拍摄范围、最少拍摄次数和相邻拍摄区域的重叠区域,确定拍摄模块 200的本次拍摄区域;
78.根据本次拍摄区域和重叠区域,确定每个拍摄位置之间的步进距离;
79.根据拍摄起点位置、本次拍摄区域、步进距离和拍摄次数,确定每个拍摄位置。
80.主控台100还用于在一个拍摄位置采集预设数量的二维图像后,控制拍摄模块200停止采集二维图像,并控制旋转站台的位置归零;
81.以及,用于控制拍摄模块200移动到下一个拍摄位置,继续采集二维图像;
82.dr处理模块300,还用于获取拍摄模块200移动到下一个拍摄位置继续采集二维图像时旋转站台的旋转角度信息。
83.本实施例中的未尽技术细节,参见前述图2所示实施例的内容。
84.在上述实施例中,对各个实施例的描述都各有侧重,某个实施例中没有详述的部分,可以参见其它实施例的相关描述。
85.以上为对本发明所提供的基于dr设备的三维图像数据采集方法和系统的描述,对于本领域的技术人员,依据本发明实施例的思想,在具体实施方式及应用范围上均会有改变之处,综上,本说明书内容不应理解为对本发明的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。