1.本发明涉及安全监控技术领域,特别涉及一种通风柜安全操作的行为分析控制系统。
背景技术:
2.目前,根据实验工艺要求,实验过程中科研人员需使用通风柜进行有毒有害高风险的实验操作,由于操作不当引发的安全事故频率较高,对人员人身安全和职业健康影响较大。
3.然而,已有的控制系统为通风控制系统和视窗动作控制系统,尚未有控制系统可以对通风柜内的风险操作预判、报警、联动做集中控制;现有的监控技术为人脸识别和gmp车间操作识别技术,尚未有针对实验工艺和科研人员的操安全风险的识别技术。且科研单位多采用人工例行检查方式,人工成本较高且不能实时进行检查和风险识别,不满足现实情况。同时,尚未有通风柜操作安全风险数据库,科研单位科普教育无数据无影像,科普难度较大且效果不佳,
4.因此,为了克服上述问题,本发明提供了一种通风柜安全操作的行为分析控制系统
技术实现要素:
5.本发明提供一种通风柜安全操作的行为分析控制系统,用以实现基于通风柜安全操作的行为分析,并依此进行报警和通风柜相关设备的联动,降低科研人员实验操作过程安全风险。
6.一种通风柜安全操作的行为分析控制系统,包括:
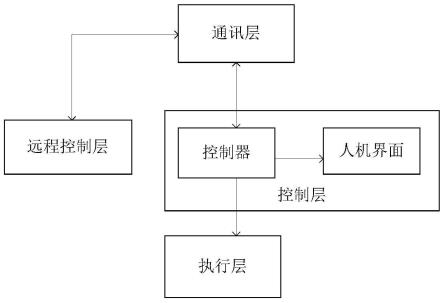
7.控制层、执行层、通讯层以及远端控制层;
8.所述控制层分别与所述执行层以及所述通讯层连接,且所述通讯层与所述远端控制层连接;
9.所述控制层,包含控制器以及人机界面,其中,所述控制器,用于对所述执行层发出动作指令并采集所述执行层的反馈数据,所述人机界面,用于显示控制器的数据参数及运行状态;
10.所述执行层,用于接收控制器的动作指令并基于所述动作指令完成运行动作,同时,基于运行结果向所述控制器发送反馈数据;
11.所述通讯层,用于读取控制器的数据参数及运行状态,并将所述数据参数及运行状态上传至远程控制层;
12.所述远程控制层,用于基于互联网监控所述控制器的数据参数及运行状态,同时,基于预设权限向所述控制器进行反向控制。
13.优选的,一种通风柜安全操作的行为分析控制系统,所述控制器,包括:
14.监控模块,用于控制监控系统实时监控在通风柜中进行的实验操作;高速开关量
模块,用于当通风柜中的实验发生安全事故时,打开视窗运动系统、vav控制系统、气体灭火系统、报警系统、排风机组控制系统中的一种或多种进行工作;模拟量模块,用于在所述通风柜中的实验发生安全事故时,对安全事故进行分析以及定位,并根据分析结果以及定位结果对vav控制系统或者视窗运动系统进行控制;通讯模块,用于将控制器中的数据参数及运行状态进行传输;大数据模块,用于对监控内容进行风险预警分析以及学习风险识别。
15.优选的,一种通风柜安全操作的行为分析控制系统,所述执行层,包括:
16.视窗运动系统,用于控制通风柜视窗进行移动;vav控制系统,用于对风量进行调节;气体灭火系统,用于当通风柜中发生火灾时,进行灭火操作;监控系统,用于监控通风柜中的实验操作;报警系统,用于当通风柜中发生安全事故时,进行报警操作;排风机组控制系统,用于对通风柜的通风速度进行调控。
17.优选的,一种通风柜安全操作的行为分析控制系统,所述通讯层包含通讯模块,所述远程控制层包含移动端与集成管理平台端。
18.优选的,一种通风柜安全操作的行为分析控制系统,所述大数据模块,包括:
19.预警分析单元,用于基于第一预设算法对通风安全操作进行预警分析,具体步骤为:
20.步骤1:获取在进行通风安全操作时的风险行为,并对所述风险行为进行分析,确定动态风险数据集;
21.步骤2:在所述动态风险数据集中选择初始化的k个样本作为初始聚类中心α,且α=α1,α2,...,αk;
22.步骤3:计算所述动态风险数据集中每个样本xm到所述k个初始聚类中心的距离,并基于计算结果,将每个样本xm分到距离最小的聚类中心所对应的风险类别中;
23.步骤4:基于分配结果,并根据如下公式,重新计算在每个风险类别中的聚类中心;
[0024][0025]
其中,aj表示在第j个风险类别中的聚类中心;ci表示在所述第j个风险类别中的第i个聚类中心;x表示所述第j个风险类别中的动态风险数据;
[0026]
步骤5:获取目标中止条件,并重复所述步骤2-4,直至达到所述目标终止条件;
[0027]
步骤6:基于计算结果,完成对风险行为的预警分析。
[0028]
优选的,一种通风柜安全操作的行为分析控制系统,所述大数据模块,还包括:
[0029]
风险行为识别单元,用于基于第二预设算法对通风柜中进行安全操作中的风险行为进行学习,具体步骤为:
[0030]
s101:获取预设卷积网络的网络神经元,并基于所述网络神经元的输出结果确定第一网络神经元状态yh=[y1,y2,...,yn]
t
,其中,h∈[1,n];y1表示卷积神经网络中第一个神经元;y2表示卷积网络中第二个神经元;yn表示卷积网络中第n个神经元;n表示所述卷积神经网络的网络神经元个数;t表示转置;
[0031]
s102:获取所述卷积神经网络的初始状态y0=[y1(0),y2(0),...,yn(0)]
t
,其中,y0表示所述卷积神经网络的初始状态,y1(0)表示所述卷积神经网络中第一个初始神经元;y2(0)表示所述卷积神经网络中第二个初始神经元;yn(0)表示所述卷积神经网络中第n个初始神经元;
[0032]
将所述卷积神经网络的初始状态在所述卷积神经网络中进行设定,基于设定结果,根据如下公式,确定所述卷积神经网络中每个神经元的学习状态变化规律;
[0033][0034]
其中,yk表示所述第二网络神经元状态;n表示所述卷积神经网络的网络神经元个数;h表示当前个网络神经元,k表示进行学习后的当前个网络神经元,且h与k一一对应;whk表示由第一网络神经元状态yh向第二网络神经元状态yk进行学习的学习因子,且取值范围为(0.99,1.01);tk表示在学习过程中的转移状态值;
[0035]
s104:基于所述学习状态变化规律以及学习结果完成对所述通风柜中进行安全操作中的风险行为进行学习。
[0036]
优选的,一种通风柜安全操作的行为分析控制系统,所述监控模块,包括:
[0037]
视频图像获取单元,用于基于预设视频图像采集装置获取在所述通风柜中进行实验操作的视频图像;
[0038]
视频图像处理单元,提取所述视频图像的上一帧视频图像以及当前帧视频图像,同时,分别获取所述上一帧视频图像的第一图像编码以及所述当前帧视频图像的第二图像编码;
[0039]
所述视频图像处理单元,还用于将所述第一图像编码与所述第二图像编码进行融合处理,确定所述目标图像编码;
[0040]
像素点信息确定单元,用于将所述目标图像编码进行二维正交变换确定所述视频图像的像素点信息;
[0041]
所述视频图像处理单元,还用于将所述视频图像的像素点信息根据预设方式进行运算,确定所述视频图像的背景图像以及前景图像;
[0042]
图像读取单元,用于对所述背景图像进行第一读取,确定通风柜进行工作的工作环境,将所述工作环境进行数据化描述,生成工作环境数据;
[0043]
风险内容确认单元,用于将所述工作环境数据在预设风险数据库中进行第一匹配,确定第一预测风险内容;
[0044]
所述图像读取单元,还用于对所述前景图像进行第二读取,提取所述前景图像中操作人员,并对所述操作人员进行追踪,确定所述操作人员的动作行为;
[0045]
姿态数据分析单元,用于基于所述操作人员的动作行为确定所述操作人员的姿态数据,同时,将所述姿态数据输入至预设操作动作模型中进行分析,并根据输出结果估计所述操作人员进行的目标操作实验;
[0046]
所述风险内容确认单元,还用于确定所述目标操作实验的实验数据,并将所述实验数据输入至所述预设风险数据库中进行第二匹配,确定第二预测风险内容;
[0047]
安全监控条件生成单元,用于根据所述第一预测风险内容以及所述第二预测风险内容,设定安全监控条件;
[0048]
监控单元,用于基于所述安全监控条件对目标操作实验进行安全监控,并当所述操作人员违背所述安全监控条件时,生成报警指令,并传输至所述执行层进行报警操作。
[0049]
优选的,一种通风柜安全操作的行为分析控制系统,如图3所示,所述监控模块,还包括:
[0050]
初始状态确认单元,用于获取所述控制器的初始数据参数,并根据所述初始数据
参数确定所述控制器的初始状态;
[0051]
区间设定单元,用于根据实验操作的安全准则以及所述控制器的初始状态所对应的初始数据参数对数据参数的变化区间进行设定,确定数据参数安全变化区间;
[0052]
运行状态读取单元,用于对所述运行状态进行读取,确定所述运行状态所对应的运行数据参数,同时,实时记录所述运行数据参数;
[0053]
安全性预测单元,用于获取所述初始数据参数与所述运行数据参数的实时变化值,并将所述实时变化值与所述数据参数安全变化区间进行比较,并根据比较结果,对通风柜中实验操作的安全性进行预测;
[0054]
其中,当所述实时变化值在所述数据参数安全变化区间内时,则判定所述通风柜中的实验操作没有发生安全事故;
[0055]
当所述实时变化值等于所述数据参数安全变化区间的临界阈值时,则判定所述通风柜中的实验操作即将发生安全事故;
[0056]
当所述实时变化值不在所述数据参数安全变化区间内时,则判定所述通风柜中的实验操作发生安全事故。
[0057]
优选的,一种通风柜安全操作的行为分析控制系统,所述安全性预测单元,还包括:
[0058]
第一报警子单元,用于当所述通风柜中的实验操作即将发生安全事故时,基于所述实时变化值生成第一预警指令,并基于所述第一预警指令控制报警系统进行第一报警操作;
[0059]
第二报警子单元,用于当所述通风柜中的实验操作发生安全事故时,基于所述实时变化值生成第二预警指令,并基于所述第二预警指令控制报警系统进行第二报警操作。
[0060]
优选的,一种通风柜安全操作的行为分析控制系统,所述远程控制层,包括:
[0061]
信息获取单元,用于当基于所述预设权限向所述控制器进行反向控制时,获取所述预设权限的权限信息以及所述控制器进行反向控制的控制指令信息;
[0062]
关联节点确认单元,用于获取通讯层与所述远程控制层的通信关联节点,并在所述通讯关联节点中确定通讯网关标签;
[0063]
请求生成单元,用于根据所述权限信息、控制指令信息以及所述通讯网关标签生成指令传递请求,并将所述指令传递请求发送至所述通讯层;
[0064]
验证单元,用于基于所述通讯层接收所述指令传递请求,并对所述指令传递请求进行读取,确定指令验证码;
[0065]
所述验证单元,还用于将所述指令验证码在预设验证文本中进行匹配验证,并当匹配验证通过时,基于所述指令传递请求将所述控制指令信息通过所述通讯层发送至所述控制器。
[0066]
本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
[0067]
下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
附图说明
[0068]
附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
[0069]
图1为本发明实施例中一种通风柜安全操作的行为分析控制系统结构图;
[0070]
图2为本发明实施例中系统架构图;
[0071]
图3为本发明实施例中监控模块结构图。
具体实施方式
[0072]
以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
[0073]
实施例1:
[0074]
本实施例提供了一种通风柜安全操作的行为分析控制系统,如图1-2所示,包括:
[0075]
控制层、执行层、通讯层以及远端控制层;
[0076]
所述控制层分别与所述执行层以及所述通讯层连接,且所述通讯层与所述远端控制层连接;
[0077]
所述控制层,包含控制器以及人机界面,其中,所述控制器,用于对所述执行层发出动作指令并采集所述执行层的反馈数据,所述人机界面,用于显示控制器的数据参数及运行状态;
[0078]
所述执行层,用于接收控制器的动作指令并基于所述动作指令完成运行动作,同时,基于运行结果向所述控制器发送反馈数据;
[0079]
所述通讯层,用于读取控制器的数据参数及运行状态,并将所述数据参数及运行状态上传至远程控制层;
[0080]
所述远程控制层,用于基于互联网监控所述控制器的数据参数及运行状态,同时,基于预设权限向所述控制器进行反向控制。
[0081]
该实施例中,控制层与执行层通过有线信号连接,控制层与通讯层通过modbus连接,通讯层与远端控制层通过以太网/5g相互连接。
[0082]
该实施例中,数据参数可以是系统在正常运行时提前设定好的,运行状态可以是对通风柜中进行实验操作的监控确定的运行状态。
[0083]
该实施例中,控制器为嵌入式控制器存储运行程序和智能分析策略,对执行层发出动作指令并采集执行层反馈数据。接收上位机操作指令,其中,上位机可以是远程控制层向控制器进行反向控制的操作指令,人机界面(hmi)显示系统数据参数以及运行状态。
[0084]
上述技术方案的工作原理为:通过对通风柜的操作实验进行监控,并当发生安全事故时基于控制层中的控制器生成动作指令,并将动作指令发送至执行层进行执行,然后通过执行层执行的结果反馈至控制层,并通过人机界面进行数据显示,根据通讯层将控制器中的数据参数与运行状态基于互联网传送至远程控制层进行监控。
[0085]
上述技术方案的有益效果是:本控制系统可实现基于通风柜安全操作的行为分析,并依此进行报警和通风柜相关设备的联动,降低科研人员实验操作过程安全风险。
[0086]
实施例2:
[0087]
在实施例1的基础上,本实施例提供了一种通风柜安全操作的行为分析控制系统,
所述控制器,包括:
[0088]
监控模块,用于控制监控系统实时监控在通风柜中进行的实验操作;高速开关量模块,用于当通风柜中的实验发生安全事故时,打开视窗运动系统、vav控制系统、气体灭火系统、报警系统、排风机组控制系统中的一种或多种进行工作;模拟量模块,用于在所述通风柜中的实验发生安全事故时,对安全事故进行分析以及定位,并根据分析结果以及定位结果对vav控制系统或者视窗运动系统进行控制;通讯模块,用于将控制器中的数据参数及运行状态进行传输;大数据模块,用于对监控内容进行风险预警分析以及学习风险识别。
[0089]
该实施例中,vav控制系统为变风量控制系统,用来控制风量。
[0090]
该实施例中,所述模拟量模块,包括:
[0091]
传感器确认单元,用于当所述通风柜中发生火灾时,确定所述通风柜中的传感器组,且所述传感器组中每一个传感器与火源的距离相等;
[0092]
第一计算单元,用于计算所述火源到所述传感器的距离;
[0093][0094]
其中,lg(
·
)表示以10为底的对数;d表示所述火源到所述传感器的距离;δ表示所述通风柜中传感器的总个数;τ表示当前个传感器;t表示火源的温度值;ti表示第i个传感器感应到的温度值;k表示常数,取值为32.4;c表示所述传感器发送的红外波在空气中的传播速度,一般取值为3*108m/s;λ表示红外波的波长;
[0095]
目标传感器获取单元,用于在所述传感器组的中心点a,同时,在所述传感器组中随机选取一个传感器,作为目标传感器,且目标传感器的位置点为b;
[0096]
第二计算单元,用于基于所述火源到所述传感器的距离,计算所述传感器组的中心点a与目标传感器的位置点所在的线段ab方向与火源方向的夹角;
[0097][0098]
其中,θ表示所述线段ab方向与火源方向的夹角;t
ε
表示所述目标传感器感应到的温度值;
[0099]
位置确认单元,用于基于所述火源到所述传感器的距离以及所述线段ab方向与所述火源方向的夹角,确定所述火源在所述通风柜中的具体位置。
[0100]
上述技术方案的有益效果是:通过控制器中的监控模块、高速开关量模块、模拟量模块、通讯模块以及大数据模块,从而实现对系统的控制监控,有利于对安全监控报警数据的可溯源性,同时,控制系统集成大数据模块,可针对风险行为分析的动态数据形成数据库,通过机器学习算法和行为分析预测模型算法迭代数据库和优化智能判据。
[0101]
实施例3:
[0102]
在实施例1的基础上,本实施例提供了一种通风柜安全操作的行为分析控制系统,所述执行层,包括:
[0103]
视窗运动系统,用于控制通风柜视窗进行移动;vav控制系统,用于对风量进行调节;气体灭火系统,用于当通风柜中发生火灾时,进行灭火操作;监控系统,用于监控通风柜中的实验操作;报警系统,用于当通风柜中发生安全事故时,进行报警操作;排风机组控制
系统,用于对通风柜的通风速度进行调控。
[0104]
上述技术方案的有益效果是:通过执行层的精准执行,可以有效保障操作人员的人身安全。
[0105]
实施例4:
[0106]
在实施例1的基础上,本实施例提供了一种通风柜安全操作的行为分析控制系统,所述通讯层包含通讯模块,所述远程控制层包含移动端与集成管理平台端。
[0107]
上述技术方案的有益效果是:基于通讯层可以实现远程控制层与控制层之间的信息交互,从而提高了对通风柜安全操作的监视控制效率。
[0108]
实施例5:
[0109]
在实施例2的基础上,本实施例提供了一种通风柜安全操作的行为分析控制系统,所述大数据模块,包括:
[0110]
预警分析单元,用于基于第一预设算法对通风安全操作进行预警分析,具体步骤为:
[0111]
步骤1:获取在进行通风安全操作时的风险行为,并对所述风险行为进行分析,确定动态风险数据集;
[0112]
步骤2:在所述动态风险数据集中选择初始化的k个样本作为初始聚类中心α,且α=α1,α2,...,αk;
[0113]
步骤3:计算所述动态风险数据集中每个样本xm到所述k个初始聚类中心的距离,并基于计算结果,将每个样本xm分到距离最小的聚类中心所对应的风险类别中;
[0114]
步骤4:基于分配结果,并根据如下公式,重新计算在每个风险类别中的聚类中心;
[0115][0116]
其中,aj表示在第j个风险类别中的聚类中心;ci表示在所述第j个风险类别中的第i个聚类中心;x表示所述第j个风险类别中的动态风险数据;
[0117]
步骤5:获取目标中止条件,并重复所述步骤2-4,直至达到所述目标终止条件;
[0118]
步骤6:基于计算结果,完成对风险行为的预警分析。
[0119]
该实施例中,第一预设算法可以是k-means行为分析算法。
[0120]
该实施例中,目标中止条件可以是人为提前设定好的,用来中止算法进行的条件。
[0121]
该实施例中,初始化是可以基于在通风柜中进行操作时,提前设定表示有风险的样本数据以及没有风险的样本数据。
[0122]
上述技术方案的有益效果是:通过k-means行为分析算法从而可以迭代数据库,实现对实验操作的操作行为的精准分类。
[0123]
实施例6:
[0124]
在实施例2的基础上,本实施例提供了一种通风柜安全操作的行为分析控制系统,所述大数据模块,还包括:
[0125]
风险行为识别单元,用于基于第二预设算法对通风柜中进行安全操作中的风险行为进行学习,具体步骤为:
[0126]
s101:获取预设卷积网络的网络神经元,并基于所述网络神经元的输出结果确定第一网络神经元状态yh=[y1,y2,...,yn]
t
,其中,h∈[1,n];y1表示卷积神经网络中第一个
神经元;y2表示卷积网络中第二个神经元;yn表示卷积网络中第n个神经元;n表示所述卷积神经网络的网络神经元个数;t表示转置;
[0127]
s102:获取所述卷积神经网络的初始状态y0=[y1(0),y2(0),...,yn(0)]
t
,其中,y0表示所述卷积神经网络的初始状态,y1(0)表示所述卷积神经网络中第一个初始神经元;y2(0)表示所述卷积神经网络中第二个初始神经元;yn(0)表示所述卷积神经网络中第n个初始神经元;
[0128]
将所述卷积神经网络的初始状态在所述卷积神经网络中进行设定,基于设定结果,根据如下公式,确定所述卷积神经网络中每个神经元的学习状态变化规律;
[0129][0130]
其中,yk表示所述第二网络神经元状态;n表示所述卷积神经网络的网络神经元个数;h表示当前个网络神经元,k表示进行学习后的当前个网络神经元,且h与k一一对应;whk表示由第一网络神经元状态yh向第二网络神经元状态yk进行学习的学习因子,且取值范围为(0.99,1.01);tk表示在学习过程中的转移状态值;
[0131]
s104:基于所述学习状态变化规律以及学习结果完成对所述通风柜中进行安全操作中的风险行为进行学习。
[0132]
该实施例中,当卷积神经网络中每个神经元都不再改变时,则神经元的输出状态为:lim
t
→
∞
x(t);其中,t表示输出时间;x(t)表示神经元的输出状态。
[0133]
该实施例中,第一网络神经元状态可以是在卷积网络中没有进行学习而确定的网络神经元状态。
[0134]
该实施例中,第二网络神经元状态可以是在卷积网络中进行学习后确定的网络神经元状态。
[0135]
该实施例中,第二预设算法可以是hopfield机器学习算法。
[0136]
上述技术方案的有益效果是:提高对操作行为中风险行为的识别精度,并且可以优化对风险行为的智能判断。
[0137]
实施例7:
[0138]
在实施例2的基础上,本实施例提供了一种通风柜安全操作的行为分析控制系统,所述监控模块,包括:
[0139]
视频图像获取单元,用于基于预设视频图像采集装置获取在所述通风柜中进行实验操作的视频图像;
[0140]
视频图像处理单元,提取所述视频图像的上一帧视频图像以及当前帧视频图像,同时,分别获取所述上一帧视频图像的第一图像编码以及所述当前帧视频图像的第二图像编码;
[0141]
所述视频图像处理单元,还用于将所述第一图像编码与所述第二图像编码进行融合处理,确定所述目标图像编码;
[0142]
像素点信息确定单元,用于将所述目标图像编码进行二维正交变换确定所述视频图像的像素点信息;
[0143]
所述视频图像处理单元,还用于将所述视频图像的像素点信息根据预设方式进行运算,确定所述视频图像的背景图像以及前景图像;
[0144]
图像读取单元,用于对所述背景图像进行第一读取,确定通风柜进行工作的工作
环境,将所述工作环境进行数据化描述,生成工作环境数据;
[0145]
风险内容确认单元,用于将所述工作环境数据在预设风险数据库中进行第一匹配,确定第一预测风险内容;
[0146]
所述图像读取单元,还用于对所述前景图像进行第二读取,提取所述前景图像中操作人员,并对所述操作人员进行追踪,确定所述操作人员的动作行为;
[0147]
姿态数据分析单元,用于基于所述操作人员的动作行为确定所述操作人员的姿态数据,同时,将所述姿态数据输入至预设操作动作模型中进行分析,并根据输出结果估计所述操作人员进行的目标操作实验;
[0148]
所述风险内容确认单元,还用于确定所述目标操作实验的实验数据,并将所述实验数据输入至所述预设风险数据库中进行第二匹配,确定第二预测风险内容;
[0149]
安全监控条件生成单元,用于根据所述第一预测风险内容以及所述第二预测风险内容,设定安全监控条件;
[0150]
监控单元,用于基于所述安全监控条件对目标操作实验进行安全监控,并当所述操作人员违背所述安全监控条件时,生成报警指令,并传输至所述执行层进行报警操作。
[0151]
该实施例中,预设视频图像采集装置例如可以是摄像机等。
[0152]
该实施例中,第一图像编码可以是上一帧视频图像的图像编码,第二图像编码可以是当前帧视频图像的图像编码。
[0153]
该实施例中,目标图像编码可以是第一图像编码与第二图像编码进行融合处理后确定的目标图像编码,用来精准获取图像编码,从而有利于提取视频图像的像素点信息。
[0154]
该实施例中,预设方式可以是二值化运算,用来提取视频图像的背景图像以及前景图像。
[0155]
该实施例中,第一读取是用来读取背景图像,从而确定通风柜的工作环境,其中,工作环境例如可以是在实验操作中是否有明火等工作环境。
[0156]
该实施例中,预设风险数据库可以是设定好的,通过k-means行为分析算法以及hopfield机器学习算法不断优化学习获得的,里面包含多种实验,以及在实验存在的风险等数据。
[0157]
该实施例中,第一匹配是将工作环境数据在预设风险数据库中进行匹配,第二匹配是将实验数据在预设风险数据库中进行匹配。
[0158]
该实施例中,第一预测风险内容例如,当工作环境中有明火。
[0159]
该实施例中,第二预测风险内容例如可以是,操作人员的操作过程会不会造成明火或者有害气体的泄露。
[0160]
该实施例中,姿态数据可以是操作人员的操作动作。
[0161]
该实施例中,安全监控条件可以是根据第一预测风险内容和第二预测风险内容确定的条件,用来作为目标操作实验进行监控的条件,当违背了安全监控条件时,则判定目标操作实验可能存在风险。
[0162]
上述技术方案的有益效果是:通过对视频图像确定视频图像的前景图像以及背景图像,并对前景图像以及背景图像进行分析,从而有利于准确确定目标操作实验以及目标操作实验的实验环境,进而通过第一预测风险内容以及第二预测风险内容,确定安全监控条件,大大提高了监控的准确性和监控效率,从而可以有效避免风险的发生。
[0163]
实施例8:
[0164]
在实施例2的基础上,本实施例提供了一种通风柜安全操作的行为分析控制系统,如图3所示,所述监控模块,还包括:
[0165]
初始状态确认单元,用于获取所述控制器的初始数据参数,并根据所述初始数据参数确定所述控制器的初始状态;
[0166]
区间设定单元,用于根据实验操作的安全准则以及所述控制器的初始状态所对应的初始数据参数对数据参数的变化区间进行设定,确定数据参数安全变化区间;
[0167]
运行状态读取单元,用于对所述运行状态进行读取,确定所述运行状态所对应的运行数据参数,同时,实时记录所述运行数据参数;
[0168]
安全性预测单元,用于获取所述初始数据参数与所述运行数据参数的实时变化值,并将所述实时变化值与所述数据参数安全变化区间进行比较,并根据比较结果,对通风柜中实验操作的安全性进行预测;
[0169]
其中,当所述实时变化值在所述数据参数安全变化区间内时,则判定所述通风柜中的实验操作没有发生安全事故;
[0170]
当所述实时变化值等于所述数据参数安全变化区间的临界阈值时,则判定所述通风柜中的实验操作即将发生安全事故;
[0171]
当所述实时变化值不在所述数据参数安全变化区间内时,则判定所述通风柜中的实验操作发生安全事故。
[0172]
该实施例中,初始数据参数是系统提前设定的,是在系统监控的通风柜是安全的基准上设定的参数。
[0173]
该实施例中,实验操作的安全准则可以是通风柜中实验人员的实验操作规范过程,是不会导致发生安全事故的操作过程。
[0174]
该实施例中,数据参数安全变化区间,可以是初始参数在安全范围内所能变化的最大区间。
[0175]
该实施例中,运行数据参数会随着实验的进行不断的变化,因此,实时变化值即为运行数据参数与初始状态参数之间的变化数值即为实时变化值。
[0176]
该实施例中,临界阈值为数据参数变化区间的区间最大值,数据参数变化区间的取值范围为大于或大于零,且小于或等于临界阈值。
[0177]
上述技术方案的有益效果是:通过对运行参数的记录追踪,可以及时发现在通风柜中进行实验操作的安全性,从而提高了监控的灵敏度。
[0178]
实施例9:
[0179]
在实施例8的基础上,本实施例提供了一种通风柜安全操作的行为分析控制系统,所述安全性预测单元,还包括:
[0180]
第一报警子单元,用于当所述通风柜中的实验操作即将发生安全事故时,基于所述实时变化值生成第一预警指令,并基于所述第一预警指令控制报警系统进行第一报警操作;
[0181]
第二报警子单元,用于当所述通风柜中的实验操作发生安全事故时,基于所述实时变化值生成第二预警指令,并基于所述第二预警指令控制报警系统进行第二报警操作。
[0182]
该实施例中,通过实时变化值生成第一预警指令或者第二预警指令,有利准确触
发第一报警操作或者第二报警操作。
[0183]
该实施例中,第一报警操作例如可以是通过通讯层向控制层或远端控制层发送报警短信。
[0184]
该实施例中,第二报警操作可以是声音、振动、灯光中的一种或多种进行报警。
[0185]
上述技术方案的有益效果是:通过第一报警操作或者第二报警操作,有利于及时发现实验操作会发生安全事故,从而有利于当通风柜中发生危险时,节省补救时间。
[0186]
实施例10:
[0187]
在实施例1的基础上,本实施例提供了一种通风柜安全操作的行为分析控制系统,所述远程控制层,包括:
[0188]
信息获取单元,用于当基于所述预设权限向所述控制器进行反向控制时,获取所述预设权限的权限信息以及所述控制器进行反向控制的控制指令信息;
[0189]
关联节点确认单元,用于获取通讯层与所述远程控制层的通信关联节点,并在所述通讯关联节点中确定通讯网关标签;
[0190]
请求生成单元,用于根据所述权限信息、控制指令信息以及所述通讯网关标签生成指令传递请求,并将所述指令传递请求发送至所述通讯层;
[0191]
验证单元,用于基于所述通讯层接收所述指令传递请求,并对所述指令传递请求进行读取,确定指令验证码;
[0192]
所述验证单元,还用于将所述指令验证码在预设验证文本中进行匹配验证,并当匹配验证通过时,基于所述指令传递请求将所述控制指令信息通过所述通讯层发送至所述控制器。
[0193]
该实施例中,控制指令信息可以是远程控制层通过用户操作自动生成的。
[0194]
该实施例中,关联节点可以是通讯层与远程控制层进行数据传递时的通讯数据节点。
[0195]
该实施例中,通讯网关标签可以是在通讯层与远程控制层的通讯网关所对应的标签,可以用二进制数据进行表示,用来准确生成指令传递请求的。
[0196]
该实施例中,指令验证码是用来验证指令传递请求的,为了保护系统数据的安全性。
[0197]
上述技术方案的有益效果是:通过生成指令传递请求并通过通讯层对指令传递请求进行验证,有利于维护本系统的安全性,并当通过验证时,将控制指令信息传递到控制器,有利于安全且精准的将数据进行反向操作。
[0198]
显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。