集成多种不同类型agv于一体的调度系统及其使用方法
技术领域
1.本发明涉及车辆调度技术领域,尤其涉及集成多种不同类型agv于一体的调度系统及其使用方法。
背景技术:
2.随着目前智能物流行业的发展迅速,自动导航的需求也越来越高,然而在多种agv运行的环境中,agv运行不仅存在交汇、交叉等情况,更多的是出现任务数据下发混乱,有可能导致agv空闲时间过长或者执行不匹配的任务等,影响运行效率,也存在agv动作错误造成安全隐患,同时,在同一个区域里的若有有中不同类型的车,用多个不同的调度系统会存在系统之间的数据不能互通,从而导致agv交通堵塞,降低物流配送的效率。
3.目前的任务管理以及调度方法都相对局限,在单个系统里面可控制的车辆类型只有一种,相当于“一对一”的模式,无法兼容多种类型的agv来进行相同路段区域统一性的管理,因此,本发明提出集成多种不同类型agv于一体的调度系统及其使用方法以解决现有技术中存在的问题。
技术实现要素:
4.针对上述问题,本发明提出集成多种不同类型agv于一体的调度系统及其使用方法,该集成多种不同类型agv于一体的调度系统及其使用方法解决同一系统里多类型车辆任务以及交通管控的不兼容问题,效率更高、绑定设置灵活。
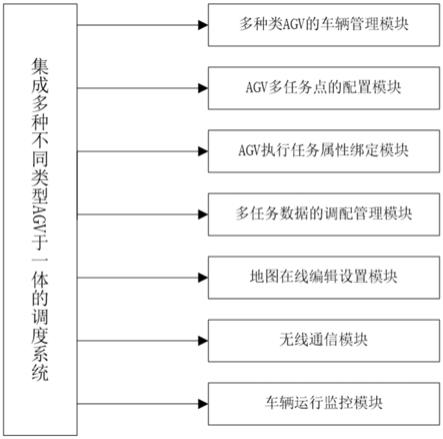
5.为实现本发明的目的,本发明通过以下技术方案实现:集成多种不同类型agv于一体的调度系统,包括模块系统和硬件系统,所述模块系统包括多种类agv车辆管理模块、agv多任务点配置模块、agv执行任务属性绑定模块、多任务数据的调配管理模块、地图在线编辑设置模块、无线通信模块和车辆运行监控模块;
6.所述硬件系统包括agv本体和上位机,所述agv本体包含了车载控制器以及通讯模块,所述模块系统装载于上位机内,所述车载控制器负责agv的正常运行,接收一切传感器和外部输入信息,作出控制决策;所述通讯模块用于接收所述模块系统发送过来的信息以及向模块系统反馈信息。
7.进一步改进在于:所述多种类agv车辆管理模块用于添加以及区分各种类型的agv,绑定对应管制车辆的ip以及是否启动的选项;所述agv多任务点配置模块用于捆绑任务点、管制区域、区域内指定agv队列。
8.进一步改进在于:所述agv执行任务属性绑定模块用于设置工作点的动作、高度、增减速点、任务点状态设置;所述多任务数据的调配管理模块用于实时任务状态以及历史任务的数据显示、存储、查询、添加、删除功能的实现。
9.进一步改进在于:所述地图在线编辑设置模块用于显示agv实时运行的线路、在线编辑地图线路、添加删除车辆、上料点、下料点、充电点;所述无线通信模块用于接收agv返回的信息以及向agv发送任务指令;所述车辆运行监控模块用于对车辆运行到达的点位实
时信息进行追踪显示,达到监控的作用。
10.进一步改进在于:所述上位机为装有操作系统,具备通信硬件接口、人机界面、存储功能的计算机,所述上位机通过所述无线通信模块实现信息收发。
11.进一步改进在于:所述通讯模块和无线通信模块为wifi、zigbee中远距离模块中的一种,所述通讯模块和无线通信模块处于同一工作频段。
12.进一步改进在于:所述车载控制器作出控制决策包括停车以及行进;所述通讯模块接收和反馈的信息包括agv编号、ip、车辆运行状态、当前地图编码、任务执行状态。
13.集成多种不同类型agv于一体的调度系统的使用方法,包括以下步骤:
14.步骤一:数据绑定
15.打开模块系统,系统自动进行初始化状态,接着利用多种类agv车辆管理模块按照不同的agv的分类进行车辆的无线连接通信配置,初次使用时,利用agv多任务点配置模块将后期使用且不轻易改变的数据进行绑定;
16.步骤二:任务分配
17.利用agv执行任务属性绑定模块自动接收来自上位机的wms系统或者无限呼叫设备的任务需求,根据所需得到对应的工作点,通过工作点station从加载绑定工作点的列表找到可匹配任务的对应管制区域的队列,紧接着通过多任务数据的调配管理模块查询队列里面空闲且无任务的agv,将处于列表里面的第一的车辆优先分配任务,选中agv后向车载控制器的任务接口发送请求;
18.步骤三:请求判断
19.当接口请求成功,判断接口返回的任务数据是否有效且符合接口内容设定的标准,有效则表明任务派遣车辆成功,当接口请求失败或者返回的数据无效,则重新发送任务请求;
20.步骤四:查询状态
21.调配agv成功后模块系统每隔一定周期通过无线通信模块广播发送查询命令查询所有运行中的agv当前的所处位置、车辆状态以及任务执行状态信息,当接收到agv返回的任务执行是未执行或者执行中的信息,说明agv依然处于忙碌状态,通过多任务数据的调配管理模块自动把该agv从可派遣的队列里移除,队列中的剩余的其他agv位置均往前顺移一位;
22.步骤五:排队队列更新
23.当接收到agv返回的状态是任务已经执行完毕,则将该agv重新自动添加到当前任务编号的管制区agv排队队列,同时,更新人机界面的实时任务状态的表格,更新数据库,模块系统也持续开放接收上位机的wms信息的接口,循环运行直至系统关闭;
24.步骤六:路径规划
25.利用多任务数据的调配管理模块调用距离任务起点最近的同时是无报警且空闲状态之下的agv去接受这个任务,在运行过程中利用地图在线编辑设置模块判断agv运行过程中是否有路径冲突,当有则从内部对agv进行交通管制,根据车辆运行监控模块的追踪显示,先到达占用点位的agv优先通过,后面的依次排队。
26.进一步改进在于:所述步骤一中,将后期使用且不轻易改变的数据进行绑定,包括任务点的参数、属性以及管制区域的绑定,每个编号的管制区对应有一个agv排队队列。
27.进一步改进在于:所述步骤六中,排在后面agv在1分钟内未能轮到,则进行路径的重新规划,循环运行直至系统关闭。
28.本发明的有益效果为:
29.1、本发明利用多种类agv车辆管理模块配合agv多任务点配置模块,来根据不同车辆类型来划分为不同的任务类型、特殊任务点、工作点动作,每种类型独立区分,有对应的绑定属性,所有类型的agv均受上位机中模块系统的管控与分配,解决同一系统里多类型车辆任务以及交通管控的不兼容问题,效率更高、绑定设置灵活。
30.2、本发明利用agv执行任务属性绑定模块对于不同类型的agv系统进行分类管制任务,同时管制在不同区域对应设置可调配的agv管控队列,当有配送任务的需求时,通过多任务数据的调配管理模块根据任务的类别分配对应类型的agv,从绑定工作点的agv队列里面查询出空闲的agv进行分配,通过在固定时间间隔里把控车辆的行驶状态以及任务完成状态来管控任务,当队列首位的agv已经被分配任务,模块系统把该agv移出队列,在队列中agv的位置均往前顺移,原地待命,当任务完成后,模块系统自动将此agv添加到可调配的agv队列中,以此按规律来进行调配,可避免多类型车辆任务发送的混乱以及错误的情况,提高物流配送的准确性。
附图说明
31.图1为本发明的模块系统示意图;
32.图2为本发明的硬件系统示意图;
33.图3为本发明的使用方法流程图。
具体实施方式
34.为了加深对本发明的理解,下面将结合实施例对本发明做进一步详述,本实施例仅用于解释本发明,并不构成对本发明保护范围的限定。
35.实施例一
36.根据图1、2所示,本实施例提出了集成多种不同类型agv于一体的调度系统,包括模块系统和硬件系统,所述模块系统包括多种类agv车辆管理模块、agv多任务点配置模块、agv执行任务属性绑定模块、多任务数据的调配管理模块、地图在线编辑设置模块、无线通信模块和车辆运行监控模块;
37.所述硬件系统包括agv本体和上位机,所述agv本体包含了车载控制器以及通讯模块,所述模块系统装载于上位机内,所述车载控制器负责agv的正常运行,接收一切传感器和外部输入信息,作出控制决策;所述通讯模块用于接收所述模块系统发送过来的信息以及向模块系统反馈信息。
38.所述多种类agv车辆管理模块用于添加以及区分各种类型的agv,绑定对应管制车辆的ip以及是否启动的选项;所述agv多任务点配置模块用于捆绑任务点、管制区域、区域内指定agv队列。所述agv执行任务属性绑定模块用于设置工作点的动作、高度、增减速点、任务点状态设置;所述多任务数据的调配管理模块用于实时任务状态以及历史任务的数据显示、存储、查询、添加、删除功能的实现。所述地图在线编辑设置模块用于显示agv实时运行的线路、在线编辑地图线路、添加删除车辆、上料点、下料点、充电点;所述无线通信模块
用于接收agv返回的信息以及向agv发送任务指令;所述车辆运行监控模块用于对车辆运行到达的点位实时信息进行追踪显示,达到监控的作用。
39.所述上位机为装有操作系统,具备通信硬件接口、人机界面、存储功能的计算机,所述上位机通过所述无线通信模块实现信息收发。所述通讯模块和无线通信模块为wifi、zigbee中远距离模块中的一种,所述通讯模块和无线通信模块处于同一工作频段。所述车载控制器作出控制决策包括停车以及行进;所述通讯模块接收和反馈的信息包括agv编号、ip、车辆运行状态、当前地图编码、任务执行状态。使用时,利用多种类agv车辆管理模块配合agv多任务点配置模块,来根据不同车辆类型来划分为不同的任务类型、特殊任务点、工作点动作,每种类型独立区分,有对应的绑定属性,所有类型的agv均受上位机中模块系统的管控与分配,同时,利用agv执行任务属性绑定模块对于不同类型的agv系统进行分类管制任务,同时管制在不同区域对应设置可调配的agv管控队列,当有配送任务的需求时,通过多任务数据的调配管理模块根据任务的类别分配对应类型的agv,从绑定工作点的agv队列里面查询出空闲的agv进行分配,通过在固定时间间隔里把控车辆的行驶状态以及任务完成状态来管控任务,当队列首位的agv已经被分配任务,模块系统把该agv移出队列,在队列中agv的位置均往前顺移,原地待命,当任务完成后,模块系统自动将此agv添加到可调配的agv队列中,以此按规律来进行调配。
40.实施例二
41.根据图3所示,本实施例提出了集成多种不同类型agv于一体的调度系统的使用方法,包括以下步骤:
42.步骤一:数据绑定
43.打开模块系统,系统自动进行初始化状态,接着利用多种类agv车辆管理模块按照不同的agv的分类进行车辆的无线连接通信配置,初次使用时,利用agv多任务点配置模块将后期使用且不轻易改变的数据进行绑定,包括任务点的参数、属性以及管制区域的绑定,每个编号的管制区对应有一个agv排队队列;
44.步骤二:任务分配
45.利用agv执行任务属性绑定模块自动接收来自上位机的wms系统或者无限呼叫设备的任务需求,根据所需得到对应的工作点,通过工作点station从加载绑定工作点的列表找到可匹配任务的对应管制区域的队列,紧接着通过多任务数据的调配管理模块查询队列里面空闲且无任务的agv,将处于列表里面的第一的车辆优先分配任务,选中agv后向车载控制器的任务接口发送请求;解决同一系统里多类型车辆任务以及交通管控的不兼容问题,效率更高、绑定设置灵活;
46.步骤三:请求判断
47.当接口请求成功,判断接口返回的任务数据是否有效且符合接口内容设定的标准,有效则表明任务派遣车辆成功,当接口请求失败或者返回的数据无效,则重新发送任务请求;
48.步骤四:查询状态
49.调配agv成功后模块系统每隔一定周期通过无线通信模块广播发送查询命令查询所有运行中的agv当前的所处位置、车辆状态以及任务执行状态信息,当接收到agv返回的任务执行是未执行或者执行中的信息,说明agv依然处于忙碌状态,通过多任务数据的调配
管理模块自动把该agv从可派遣的队列里移除,队列中的剩余的其他agv位置均往前顺移一位;
50.步骤五:排队队列更新
51.当接收到agv返回的状态是任务已经执行完毕,则将该agv重新自动添加到当前任务编号的管制区agv排队队列,同时,更新人机界面的实时任务状态的表格,更新数据库,模块系统也持续开放接收上位机的wms信息的接口,循环运行直至系统关闭;
52.步骤六:路径规划
53.利用多任务数据的调配管理模块调用距离任务起点最近的同时是无报警且空闲状态之下的agv去接受这个任务,在运行过程中利用地图在线编辑设置模块判断agv运行过程中是否有路径冲突,当有则从内部对agv进行交通管制,根据车辆运行监控模块的追踪显示,先到达占用点位的agv优先通过,后面的依次排队,排在后面agv在1分钟内未能轮到,则进行路径的重新规划,循环运行直至系统关闭。可避免多类型车辆任务发送的混乱以及错误的情况,提高物流配送的准确性。
54.本发明利用多种类agv车辆管理模块配合agv多任务点配置模块,来根据不同车辆类型来划分为不同的任务类型、特殊任务点、工作点动作,每种类型独立区分,有对应的绑定属性,所有类型的agv均受上位机中模块系统的管控与分配,解决同一系统里多类型车辆任务以及交通管控的不兼容问题,效率更高、绑定设置灵活。且本发明利用agv执行任务属性绑定模块对于不同类型的agv系统进行分类管制任务,同时管制在不同区域对应设置可调配的agv管控队列,当有配送任务的需求时,通过多任务数据的调配管理模块根据任务的类别分配对应类型的agv,从绑定工作点的agv队列里面查询出空闲的agv进行分配,通过在固定时间间隔里把控车辆的行驶状态以及任务完成状态来管控任务,当队列首位的agv已经被分配任务,模块系统把该agv移出队列,在队列中agv的位置均往前顺移,原地待命,当任务完成后,模块系统自动将此agv添加到可调配的agv队列中,以此按规律来进行调配,可避免多类型车辆任务发送的混乱以及错误的情况,提高物流配送的准确性。
55.以上显示和描述了本发明的基本原理、主要特征和优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。