技术特征:
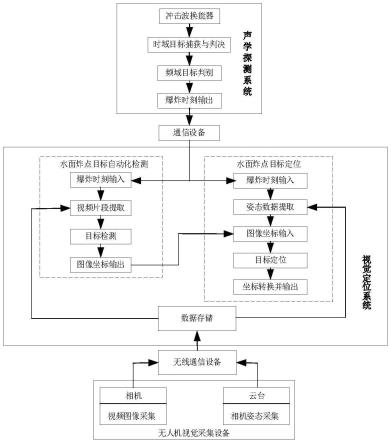
1.一种基于声学和视觉联合的水下爆炸定位方法,其特征在于,包括如下步骤:步骤1:构建水下爆炸定位系统;所述水下爆炸定位系统包括声学探测模块、视觉定位系统和无人机视觉采集模块;所述视觉定位系统包括水面炸点目标自动化检测模块和水面炸点目标定位模块;所述声学探测模块用于探测水下爆炸发生的时刻;所述无人机视觉采集模块从上方向下采集水面视频;所述水面炸点目标自动化检测模块根据水下爆炸发生时刻,进行水面炸点目标的视觉自动化检测并输出水面炸点目标在视频图像帧中的坐标;所述水面炸点目标定位模块基于水面炸点目标在视频图像帧中的坐标与无人机视觉采集模块姿态数据完成水面炸点目标在大地坐标系中的定位;所述声学探测模块、视觉定位系统安装在船舶上,无人机视觉采集模块安装在无人机上;步骤2:水下爆炸定位系统启动;所述声学探测模块开始工作,并持续监测水下的爆炸信号,同时携带视觉采集设备的无人机跟随在舰船后上方同步运动;步骤3:当发生水下爆炸时,声学探测模块检测到爆炸信号同时将爆炸发生的时刻发送至视觉定位系统;所述声学探测模块、视觉定位系统通过gps授时的方式实现时间同步;步骤4:无人机视觉采集模块将持续采集到的水面视频与无人机视觉采集模块的姿态数据通过无线通信的方式传送给水面炸点目标自动化检测模块;步骤5:水面炸点目标自动化检测模块持续接收并存储无人机视觉采集模块传送的水面视频数据、无人机视觉采集模块的姿态数据;步骤6:当水面炸点目标自动化检测模块接收到水下爆炸发生的时刻后,从存储的水面视频数据中提取到水下爆炸发生时刻前后设定时间范围的视频数据,并在提取的视频数据中进行水面炸点目标的检测,检测到水面炸点目标后将水面炸点目标在视频图像帧中的坐标传递给水面炸点目标定位模块;步骤7:水面炸点目标定位模块接收到水面炸点目标在视频图像帧中的坐标和水下爆炸发生的时刻后,根据水下爆炸发生的时刻提取同一时间无人机视觉采集模块的姿态数据;采用基于共线方程的单目视觉定位方法将无人机视觉采集模块所在的倾斜坐标系转换为水平坐标系,得到相机坐标系下的水面炸点目标位置;再将无人机视觉采集模块的gps坐标转换为utm坐标,通过代数运算将水面炸点目标相对无人机视觉采集模块在相机坐标系下的笛卡尔坐标转换为utm坐标,最后将水面炸点目标的utm坐标转换为gps坐标,得到水面炸点目标在大地坐标系的坐标。2.根据权利要求1所述的一种基于声学和视觉联合的水下爆炸定位方法,其特征在于,所述声学探测模块监测水下爆炸信号的具体方法如下:所述声学探测模块采用基于能量检测的声学探测系统;采用大于25khz的高频带与低于10khz的低频带同时检测的方式;对接收的水声信号进行前置放大后再进行滤波,然后采用多级固定增益放大级联的方式实现对大动态范围水声信号进行每级放大倍数为10倍的三次逐级放大;将放大到不同倍数的水声信号进行数字化采集和存储,采用时域能量检测的方法实现对水下爆炸冲击波信号的初步判断,当判断有信号超过检测门限时,将超过门限的脉冲信号通过fft变换到频域,在频域判断脉冲信号是否具有爆炸冲击波的频谱特征,
当高频与低频的频谱同时满足冲击波的特征时判决脉冲信号为水下爆炸冲击波信号,发送水下爆炸发生的时刻至水面炸点目标自动化检测模块和水面炸点目标定位模块。3.根据权利要求1所述的一种基于声学和视觉联合的水下爆炸定位方法,其特征在于,所述无人机视觉采集模块为无人机航拍设备,配置单目摄像机、云台、相机姿态传感器、相机水平传感器、机高度传感器和相机位置传感器。4.根据权利要求1所述的一种基于声学和视觉联合的水下爆炸定位方法,其特征在于,所述水面炸点目标自动化检测模块进行水面炸点目标检测具体过程包括图像预处理和自动化目标检测;所述图像预处理将无人机视觉采集模块采集到的视频图像帧进行:
①
图像矫正:获取获得无人机视觉采集模块的矫正参数后,根据矫正参数进行计算实现图像坐标的矫正,解决相机镜头为非理想凸透镜,导致空间物体在图像中发生畸变影响图像坐标的问题;
②
图像灰度化:将获取到的彩色图像转化为灰度图,只利用图像中的强度信息,采用平均值法进行灰度处理;
③
图像滤波:采用高斯滤波做图像的平滑与降噪,首先根据滤波需求设计高斯核,然后利用高斯核进行滑动卷积,最终求出图像中的每一个像素的值,从而降低非目标对目标检测的干扰;所述自动化目标检测采用固定背景融合帧差算法:选取水下爆炸发生时刻前后设定时间范围的视频数据中水下爆炸发生时刻前的多帧视频图像帧的融合图像作为背景帧,然后对水下爆炸发生时刻后的视频图像帧求差实现对水面炸点目标的检测。
技术总结
本发明公开了一种基于声学和视觉联合的水下爆炸定位方法,本发明方法中将声学探测模块和视觉定位系统搭载于运动的作业船舶上,其中声学探测模块将持续监测附近可能出现的爆炸信号,并将其监测到的爆炸时刻发送到视觉定位系统;视觉采集设备则搭载在跟随运动舰船的无人机上,将持续采集到的视觉图像与相机内外参数通过无线通信的方式回传给定位系统。视觉定位系统综合利用声学监测到的爆炸发生时刻与水面炸点的视觉图像完成对水面炸点的定位。本发明方法具备灵活性、可靠性、灵活性,克服了单一的声学定位系统的复杂性以及单一的视觉定位系统的不可靠性。定位系统的不可靠性。定位系统的不可靠性。
技术研发人员:罗建 魏袁媛 杨松 张海涛 王慧刚
受保护的技术使用者:西北工业大学
技术研发日:2022.03.08
技术公布日:2022/7/12
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。