1.本公开涉及人工智能技术领域,尤其涉及自动驾驶、自主泊车和智能交通技术领域,可适用于巡航记忆泊车和低速辅助驾驶场景。
背景技术:
2.随着人工智能技术的发展,自动驾驶技术逐渐兴起。例如,自动控制车辆巡航记忆泊车和低速辅助驾驶等。然而,自动驾驶环境中通常存在障碍物等不定因素,严重影响车辆自动驾驶的安全性。
技术实现要素:
3.本公开提供了一种车辆控制方法、装置、设备以及存储介质。
4.根据本公开的一方面,提供了一种车辆控制方法,包括:
5.根据车辆行驶方向,从车辆上预设基准点中选择目标基准点,以及确定所述车辆行驶方向关联的距离计算参数;
6.根据所述目标基准点的位置信息、所述距离计算参数,以及目标障碍物的位置信息,确定所述目标障碍物与所述车辆之间的间隔距离;
7.根据目标障碍物与车辆之间的间隔距离,控制车辆行驶。
8.根据本公开的另一方面,提供了一种电子设备,该电子设备包括:
9.至少一个处理器;以及
10.与至少一个处理器通信连接的存储器;其中,
11.存储器存储有可被至少一个处理器执行的指令,指令被至少一个处理器执行,以使至少一个处理器能够执行本公开任一实施例的车辆控制方法。
12.根据本公开的另一方面,提供了一种存储有计算机指令的非瞬时计算机可读存储介质,其中,计算机指令用于使计算机执行本公开任一实施例的车辆控制方法。
13.本公开实施例的方案,能够提高目标障碍物与车辆之间距离计算的精准性,进而提高车辆控制的安全性和可靠性。
14.应当理解,本部分所描述的内容并非旨在标识本公开的实施例的关键或重要特征,也不用于限制本公开的范围。本公开的其它特征将通过以下的说明书而变得容易理解。
附图说明
15.附图用于更好地理解本方案,不构成对本公开的限定。其中:
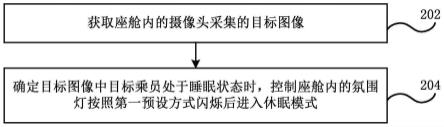
16.图1a是根据本公开实施例提供的一种车辆控制方法的流程图;
17.图1b是根据本公开实施例提供的车辆俯视图;
18.图2a是根据本公开实施例提供的一种车辆控制方法的流程图;
19.图2b是根据本公开实施例提供的车辆向前直行示意图;
20.图2c是根据本公开实施例提供的车辆倒车直行示意图;
21.图2d是根据本公开实施例提供的车辆向前右转示意图;
22.图2e是根据本公开实施例提供的车辆倒车右转示意图;
23.图3是根据本公开实施例提供的一种车辆控制方法的流程图;
24.图4是根据本公开实施例提供的一种车辆控制方法的流程图;
25.图5是根据本公开实施例提供的一种车辆控制装置的结构示意图;
26.图6是用来实现本公开实施例的车辆控制方法的电子设备的框图。
具体实施方式
27.以下结合附图对本公开的示范性实施例做出说明,其中包括本公开实施例的各种细节以助于理解,应当将它们认为仅仅是示范性的。因此,本领域普通技术人员应当认识到,可以对这里描述的实施例做出各种改变和修改,而不会背离本公开的范围和精神。同样,为了清楚和简明,以下的描述中省略了对公知功能和结构的描述。
28.图1a是根据本公开实施例提供的一种车辆控制方法的流程图;本公开实施例适用于控制自动驾驶车辆行驶的情况。尤其适用于在巡航记忆泊车或低速辅助驾驶场景下,控制自动驾驶车辆行驶的情况。该方法可以由车辆控制装置来执行,该装置可以采用软件和/或硬件的方式实现。具体可以集成于自动驾驶车辆的控制设备中。如图1a所示,本实施例提供的车辆控制方法可以包括:
29.s101,根据车辆行驶方向,从车辆上预设基准点中选择目标基准点,以及确定车辆行驶方向关联的距离计算参数。
30.本实施例中车辆的行驶方向可以包括向前直行、倒车直行、向前转弯和倒车转弯四种,其中,向前转弯又可进一步包括向前左转和向前右转;倒车转弯又可进一步包括倒车左转和倒车右转。
31.本实施例中的预设基准点为车辆上的预设基准点可以是预先在车辆上选择出的用于辅助计算目标障碍物与车辆之间的间隔距离的位置点。可选的,本实施例可以在车辆上选择多个预设基准点,并将各预设基准点在车体坐标系下的位置坐标作为各预设基准点的位置信息。
32.本实施例的距离计算参数,可以是用于计算目标障碍物与车辆之间的间隔距离时,所需要使用到的出目标基准点和目标障碍物的位置信息之外的其他参数。其可以是车辆的固有参数,如车体中心、还可以是与车辆行驶状态相关的参数,如车辆的转弯中心;还可以是为了保证安全行驶预设的参数,如预设的安全距离阈值(如10cm)。
33.可选的,本实施例可以根据当前车辆行驶方向的不同,选择不同的预设基准点和距离计算参数,来辅助计算目标障碍物与车辆之间的间隔距离。具体的,可以预先为不同的行驶方向设置不同的目标基准点筛选规则,以及距离计算参数筛选规则,此时,可以根据车辆当前的行驶方向,根据该行驶方向对应的目标基准点筛选规则和计算参数筛选规则,从车辆上的多个预设基准点中确定目标基准点,以及确定车辆行驶方向关联的距离计算参数。
34.s102,根据目标基准点的位置信息、距离计算参数,以及目标障碍物的位置信息,确定目标障碍物与车辆之间的间隔距离。
35.本实施例的目标障碍物可以是车身四周一定范围内所包含的所有障碍物(即车辆
周围障碍物);也可以是从车身四周的所有障碍物中,筛选出来的位于车辆行驶方向关联的危险区域内的那部分障碍物,其中,车辆行驶方向关联的危险区域可以是车辆基于该行驶方向行驶的过程中可能会发生碰撞的区域。可选的,本实施例的目标障碍物可以是环境中的静态障碍物,如停车场的柱子和马路上的围栏等。也可以是环境中的动态障碍物,如道路中的其他车辆和行人等。本实施例中的目标障碍物的数量为一个或多个。
36.本实施例可以基于超声波传感器和视觉感知设备(如摄像头和激光雷达等)采集车辆四周的环境数据,并对不用设备采集的环境数据进行融合分析,确定车身四周存在的所有障碍物,然后将所有障碍物作为目标障碍物,或者从中筛选出可能会与车辆发生碰撞的障碍物作为目标障碍物,并进一步确定目标障碍物在车辆坐标系下的坐标位置,作为目标障碍物的位置信息。可选的,本实施例可以基于图像处理算法和/或预先训练的神经网络模型来解析环境数据,确定目标障碍物以及目标障碍物的位置信息。
37.可选的,本实施例根据目标基准点的位置信息、距离计算参数,以及目标障碍物的位置信息,确定目标障碍物与车辆之间的间隔距离的方式有很多,对此不进行限定。一种可实现方式为:针对每一目标障碍物,将该目标障碍物的位置信息、目标基准点的位置信息和距离计算参数输入到预先训练好的距离推算模型中,该模型即可基于输入的信息解析该目标障碍物与车辆之间的间隔距离。另一种可实现方式为:针对不同的车辆行驶方向,预先设置不同的间隔距离计算公式,即基于目标障碍物的位置信息、目标基准点的位置信息和距离计算参数,计算目标障碍物与车辆之间的间隔距离的公式。此时可以基于当前的车辆行驶方向,选择对应的间隔距离计算公式,并依次将每一目标障碍物的位置信息、目标基准点的位置信息和距离计算参数代入到选择的间隔距离计算公式中,计算该目标障碍物与车辆之间的间隔距离。
38.s103,根据目标障碍物与车辆之间的间隔距离,控制车辆行驶。
39.可选的,本实施例可以基于确定出各个目标障碍物与车辆之间的间隔距离,来控制车辆行驶。具体的,可以将各个目标障碍物与车辆之间的间隔距离输入到自动驾驶车辆的决策模块中,该决策模块可以基于各目标障碍物与车辆之间的间隔距离,结合车辆行驶路线和车辆自身的行驶数据,如速度、加速度、方向盘扭矩等,控制车辆避开目标障碍行驶,如可以通过减速变道的方式避开目标障碍物。若目标障碍物与车辆距离较近,难以避让时,可以控制车辆刹车制动,以避免与目标障碍物发生碰撞。
40.本公开实施例的方案,针对不同的车辆行驶方向,从预设基准点中选择不同的目标基准点,以及确定不同的距离计算参数,来根据目标基准点的位置信息,计算目标障碍物与车辆之间的间隔距离,进而基于该间隔距离,控制车辆行驶。相比于现有技术直接通过传感器,如超声波传感器来测量车辆与目标障碍物之间的间隔距离,极大的提高了障碍物与车辆之间的间隔距离确定的精准性,进而基于该精准的间隔距离控制车辆行驶,很好的保障了车辆自动驾驶的安全性和可靠性。
41.可选的,本实施例可以在车辆上选择至少四个预设基准点,即第一基准点、第二基准点、第三基准点和第四基准点。如图1b所示,第一基准点为车辆俯视图中车头侧s1和车门侧s2之间的圆弧ab在车头侧s1的端点,即点a;第二基准点为圆弧ab在车门侧s2的端点,即点b;第三基准点为车辆俯视图中车尾侧s3和车门侧s2之间的交点,即点c;第四基准点为车辆俯视图中后车轴l与车门侧s4的交点,即点d。本实施例选择的上述四个预设基准点,能够
保证在尽可能少的选基准点的前提下,精准的计算出目标障碍物与车辆之间的间隔距离。
42.图2a是根据本公开实施例提供的一种车辆控制方法的流程图;图2b是根据本公开实施例提供的车辆向前直行示意图;图2c是根据本公开实施例提供的车辆倒车直行示意图;图2d是根据本公开实施例提供的车辆向前右转示意图;图2e是根据本公开实施例提供的车辆倒车右转示意图。本公开实施例在上述实施例的基础上,进一步对如何根据车辆行驶方向,从车辆上预设基准点中选择目标基准点,确定车辆行驶方向关联的距离计算参数,以及根据目标基准点的位置信息、距离计算参数和目标障碍物的位置信息,确定目标障碍物与车辆之间的间隔距离的过程进行详细解释说明,如图2a-2e所示,本实施例提供的车辆控制方法可以包括:
43.s201,根据车辆行驶方向,从车辆上预设基准点中选择目标基准点,以及确定车辆行驶方向关联的距离计算参数。
44.其中,可选的,本实施例的预设基准点包括:车辆俯视图中车头侧和车门侧之间的圆弧在车头侧的端点,即第一基准点;该圆弧在车门侧的端点,即第二基准点;车辆俯视图中车尾侧和车门侧之间的交点,即第三基准点;车辆俯视图中后车轴与车门侧的交点,即第四基准点。本实施例可以根据当前车辆行驶方向的不同,选择不同的预设基准点和距离计算参数,来辅助计算目标障碍物与车辆之间的间隔距离。
45.具体的:若车辆行驶方向为向前直行,则选择车辆上预设基准点中的第一基准点和第二基准点,作为目标基准点(即图2b中的点a和点b);且将安全距离阈值作为该车辆行驶方向关联的距离计算参数。
46.若车辆行驶方向为倒车直行,则选择车辆上预设基准点中的第二基准点和第三基准点,作为目标基准点(即图2c中的点b和点c);且将安全距离阈值作为该车辆行驶方向关联的距离计算参数。
47.若车辆行驶方向为向前转弯,则选择车辆上预设基准点中的第一基准点、第二基准点和第三基准点,作为目标基准点(即图2d中的点a、点b和点c);且将车体中心(即图2d中的点o
body
)、转弯中心(即图2d中的点o
circle
)、圆弧直径延伸长度(即图2d中的ff')和安全距离阈值作为车辆行驶方向关联的距离计算参数。
48.若车辆行驶方向为倒车转弯,则选择车辆上预设基准点中的第一基准点、第三基准点和第四基准点(即图2e中的点a、点c和点d),作为目标基准点;且将车体中心(即图2e中的点o
body
)、转弯中心(即图2e中的点o
circle
)和安全距离阈值作为车辆行驶方向关联的距离计算参数。
49.本实施例通过上述方式为各种车辆行驶方向确定对应的目标基准点和距离计算参数,为后续精准计算不同车辆行驶方向下目标障碍物之间的间隔距离提供了保障。
50.s202,根据目标基准点的位置信息、距离计算参数,以及目标障碍物的位置信息,确定目标障碍物与车辆之间的间隔距离。
51.可选的,本实施例将车辆向前直行的方向作为车体坐标系的x轴正方向,将车轴方向作为车体坐标系的y轴方向,其中,靠左侧车门方向为y轴的正方向。且第一基准点a为的坐标为(xa,ya),第二基准点b的坐标为(xb,yb);第三基准点c的坐标为(xc,yc),且|yb|=|yc|等于半车宽。第四基准点d的坐标为(xd,yd);车体中心o
body
的坐标为(0,0),转弯中心o
circle
的坐标为(xc,yc)。
52.需要说明的是,如图2b-2e所示,图中的位置可以看作一个障碍物,本实施例可以将图2b-2e中的所有障碍物都作为目标障碍物;也可以是仅将图2b-2e中车周围的阴影区域中的障碍物作为目标障碍物,接下来以图中的目标障碍物为例,来介绍各种情况下目标障碍物与车辆之间的间隔距离的计算方式。
53.若车辆行驶方向为向前直行,如图2b所示,若即目标障碍物位于车头侧前方阴影处,则基于下述公式(1)来计算目标障碍物与车辆之间的间隔距离。
[0054][0055]
其中,d
obs_i
为目标障碍物pi与车辆之间的间隔距离;和分别代表目标障碍物在车体坐标系下的x坐标和y坐标;xa和ya分别代表第一基准点a在车体坐标系下的x坐标和y坐标;xb和yb分别代表第二基准点b在车体坐标系下的x坐标和y坐标;d
side_threshold
为预先为车门侧设置的安全距离阈值,该安全距离阈值优选设置为较小的值,如10cm。
[0056]
若即目标障碍物位于两车门侧阴影处,则基于下述公式(2)来计算目标障碍物与车辆之间的间隔距离。
[0057][0058]
其中,d
obs__i
为目标障碍物pi与车辆之间的间隔距离;和分别代表目标障碍物在车体坐标系下的x坐标和y坐标;xb和yb分别代表第二基准点b在车体坐标系下的x坐标和y坐标;d
side_threshold
为预先为车门侧设置的安全距离阈值。
[0059]
若为其他,则目标障碍物与车辆之间的间隔距离d
obs_i
=d
max
,d
max
为预先设置的极大默认值。
[0060]
若车辆行驶方向为倒车直行,如图2c所示,若即目标障碍物位于车尾测后方阴影处,基于下述公式(3)来计算目标障碍物与车辆之间的间隔距离。
[0061][0062]
其中,其中,d
obs__i
为目标障碍物pi与车辆之间的间隔距离;和分别代表目标障碍物在车体坐标系下的x坐标和y坐标;xc和yc分别代表第三基准点c在车体坐标系下的x坐标和y坐标;d
side_threshold
为预先为车门侧设置的安全距离阈值。
[0063]
若即目标障碍物位于两车门侧阴影处,则此时可以与向前直行时,目标障碍物位于车门侧阴影处类似,基于上述公式(2)来计算目标障碍物与车辆之间的间隔距离。
[0064]
若为其他,则目标障碍物与车辆之间的间隔距离d
obs_i
=d
max
,d
max
为预先设置的极大默认值。
[0065]
若车辆行驶方向为向前转弯,如图2d所示,以向前右转为例,根据车体中心o
body
(0,0)和转弯中心o
circle
(xc,yc),可确定转弯半径r=|o
bodyocircle
|。车辆向前右转时,车身各
点绕o
circle
向右旋转前进,目标障碍物在车体坐标系下绕转弯中心旋转的旋转半径其中,和分别代表目标障碍物在车体坐标系下的x坐标和y坐标;xc和yc分别代表第三基准点c在车体坐标系下的x坐标和y坐标。
[0066]
相应的,行驶覆盖区域为如2d中的阴影区域。
[0067]
具体的,若即目标障碍物位于图2d环形区域efgh内,此时可以基于下述公式(4)-(6)来计算目标障碍物与车辆之间的间隔距离。
[0068][0069][0070][0071]
其中,d
obs_i
为目标障碍物pi与车辆之间的间隔距离;和分别代表目标障碍物在车体坐标系下的x坐标和y坐标;xa和ya分别代表第一基准点a在车体坐标系下的x坐标和y坐标;xb和yb分别代表第二基准点b在车体坐标系下的x坐标和y坐标;xc和yc分别代表第三基准点c在车体坐标系下的x坐标和y坐标;o
circle
为转弯中心;r
obs
为目标障碍物在车体坐标系下绕o
circle
旋转时的旋转半径;h和g分别为驶覆盖区域的两个端点;e和f'分别为车辆俯视图中,车头侧与两车门侧延长线的交点,f为圆弧第一基准点a和第二基准点b对应圆弧的中心点。d
ff
′
为圆弧直径延伸长度。
[0072]
若且即目标障碍物位于图2d中bc左侧阴影区域,此时可以基于下述公式(7)来计算目标障碍物与车辆之间的间隔距离。
[0073][0074]
其中,d
obs__i
为目标障碍物pi与车辆之间的间隔距离;和分别代表目标障碍物在车体坐标系下的x坐标和y坐标;xb和yb分别代表第二基准点b在车体坐标系下的x坐标和y坐标;d
side_threshold
为预先为车门侧设置的安全距离阈值;xc代表第三基准点c在车体坐标系下的x坐标。
[0075]
若且即目标障碍物位于图2d中环形区域dehi内,且目标障碍物相对车辆的实时运动轨迹为圆弧其中,q点为障碍物pi与车身侧方的未来碰撞点。假设未知点q的坐标为q(xq,yq),由车辆旋转运动特性,有如下关系:
[0076]
|o
circle
i|=|o
circle
d|=r-|yd|=r-ybꢀꢀꢀ
(8)
[0077]
|o
circle
q|=|o
circle
pi|=r
obs
ꢀꢀꢀꢀ
(9)
[0078][0079]
因此,在rtδo
circle
dq中,根据勾股定理可得:
[0080][0081]
基于上述公式(8)-(10)可以推算未来碰撞点q的坐标为:
[0082]
[0083]
进而可以确定:
[0084][0085]
其中,o
circle
为转弯中心;r为转弯半径;d为第四基准点,yd为第四基准点在车体坐标系下的y坐标,其等于;第二基准点b在车体坐标系下的y坐标yb;q点为障碍物pi与车身侧方的未来碰撞点,其在车体坐标系下的坐标为(xq,yq);pi为目标障碍物在车体坐标系下的坐标,包括和r
obs
为目标障碍物在车体坐标系下绕o
circle
旋转时的旋转半径;d
obs__i
为目标障碍物pi与车辆之间的间隔距离为目标障碍物pi相对车辆的实时运动轨迹;|piq|为目标障碍物与点q之间的直线距离。
[0086]
若为其他,则目标障碍物与车辆之间的间隔距离d
obs_i
=d
max
,d
max
为预先设置的极大默认值。
[0087]
需要说明的是,若车辆行驶状态为向前左转弯时,计算过程与上述向前右转弯类似,只需将行驶覆盖区域沿x轴对称计算即可,在此不进行赘述。
[0088]
若车辆行驶方向为倒车转弯,如图2e所示,以倒车右转为例,车辆转弯半径r和目标障碍物在车体坐标系下绕转弯中心旋转的旋转半径r
obs
的计算方式在上述向前右转时已经介绍,再此不进行赘述。行驶覆盖区域为如2e中的阴影区域。
[0089]
此时,若即目标障碍物位于图2e环形区域cikj内,此时可以基于下述公式(13)来计算目标障碍物与车辆之间的间隔距离。
[0090][0091]
其中,d
obs__i
为目标障碍物与车辆之间的间隔距离;为目标障碍物在车体坐标系下的x坐标;c为第三基准点,xc为第三基准点c在车体坐标系下的x坐标;d为第四基准点;r
obs
为目标障碍物在车体坐标系下绕o
circle
旋转时的旋转半径。
[0092]
若且即目标障碍物位于图2e中ie右侧阴影区域,此时可以基于下述公式(14)来计算目标障碍物与车辆之间的间隔距离。
[0093][0094]
其中,d
obs__i
为目标障碍物与车辆之间的间隔距离;和分别代表目标障碍物在车体坐标系下的x坐标和y坐标;xd和yd分别代表第四基准点d在车体坐标系下的x坐标和y坐标;d
side_threshold
为预先为车门侧设置的安全距离阈值。
[0095]
若且即目标障碍物位于图2e中环形区域mnbf内,且目标障碍物相对车辆的实时运动轨迹为圆弧其中,q点为障碍物pi与车身侧方的未来碰撞点。假设未知点q的坐标为q(xq,yq),由车辆旋转运动特性,有如下关系:
[0096]
|o
circle
n|=r |yd|
ꢀꢀꢀꢀ
(15)
[0097]
|o
circle
q|=|o
circle
pi|=r
obs
ꢀꢀꢀꢀ
(16)
[0098][0099]
因此,在tδo
circle
nq中,根据勾股定理可得:
[0100][0101]
基于上述公式(15)-(18)可以推算未来碰撞点q的坐标为:
[0102][0103]
进而可以确定:
[0104][0105]
其中,o
circle
为转弯中心;r为转弯半径;n为第四基准点d相对于x轴的对称点,yd为第四基准点在车体坐标系下的y坐标,其等于第二基准点b在车体坐标系下的y坐标yb;q点为障碍物与车身侧方的未来碰撞点,其在车体坐标系下的坐标为(xq,yq);pi为目标障碍物在车体坐标系下的坐标,包括和r
obs
为目标障碍物在车体坐标系下绕o
circle
旋转时的旋转半径;d
obs_i
为目标障碍物pi与车辆之间的间隔距离为目标障碍物pi相对车辆的实时运动轨迹;|piq|为目标障碍物与点q之间的直线距离。
[0106]
若为其他,则目标障碍物与车辆之间的间隔距离d
obs_i
=d
max
,d
max
为预先设置的极大默认值。
[0107]
需要说明的是,若车辆行驶状态为倒车左转弯时,计算过程与上述倒车右转弯类似,只需将行驶覆盖区域沿x轴对称计算即可,在此不进行赘述。
[0108]
s203,根据目标障碍物与车辆之间的间隔距离,控制车辆行驶。
[0109]
本公开实施例的方案,针对不同的车辆行驶方向,给出了具体如何根据不同的车辆行驶方向,选择不同的目标基准点和距离计算方式,计算目标障碍物与车辆之间的间隔距离,进一步提高了间隔距离确定的精准性,为基于间隔距离安全且精准的控制车辆行驶提供了保障。
[0110]
图3是根据本公开实施例的一种车辆控制方法的示意图,本公开实施例在上述实施例的基础上,进一步对如何确定目标障碍物的过程进行详细解释说明,如图3所示,本实施例提供的车辆控制方法可以包括:
[0111]
s301,根据车辆行驶方向和车辆上预设基准点的位置信息,确定车辆行驶方向关联的危险区域。
[0112]
其中,危险区域为车辆行驶的过程中可能会与环境中的障碍物发生碰撞的区域,车辆行驶方向不同,关联的危险区域也就不同。可选的,车辆行驶方向关联的危险区域,可能由多个子区构成。例如,如图2d所示,车辆行驶方向为向前右转时,关联的危险区域包括:阴影区域fghe,即子区域1、阴影区域ehid,即子区域2和bc左侧区域,即子区域3。
[0113]
可选的,本实施例可以根据车辆行驶方向和车辆上预设基准点的位置信息,确定车辆行驶方向关联的危险区域的一种可实现方式为:将车辆行驶方向和车辆上预设基准点的位置信息输入到预先训练好的危险区域划分模型中,该模型即可基于输入的参数,解析出该行驶方向对应的危险区域。
[0114]
另一种可实现方式为:根据不同车辆行驶方向,从车辆上的多个预设基准点中选出不同的基准点,来确定不同车辆行驶方向对应的危险区域。此时可以将车辆行驶方向分为直行(包括向前转弯和倒车转弯)和转弯(向前转弯和倒车转弯)两种。具体的:
[0115]
若车辆行驶方向为向前直行或倒车直行,则根据车辆上预设基准点中第一基准点和第三基准点的位置信息,确定车辆行驶方向关联的危险区域。
[0116]
具体的,如图2b所示,根据第一基准点a和第三基准点c的位置信息,确定向前直行关联的危险区域的方式为:
[0117]
将图2b中,的区域,即车头侧前方阴影区域作为向前直行关联的危险区域的第一子区域;其中,为目标障碍物在车体坐标系下的x坐标;xb为第二基准点b在车体坐标系下的x坐标。
[0118]
将图2b中,的区域,即两车门侧(即左侧和右侧)阴影区域作为向前直行关联的危险区域的第二子区域和第三子区域。其中,为目标障碍物在车体坐标系下的x坐标;xb为第二基准点b在车体坐标系下的x坐标;xc为第三基准点c在车体坐标系下的x坐标。
[0119]
如图2c所示,根据第一基准点a和第三基准点c的位置信息,确定倒车直行关联的危险区域的方式为:
[0120]
将图2c中,的区域,即车尾测后方阴影区域作为倒车直行关联的危险区域的第一子区域;其中,为目标障碍物在车体坐标系下的x坐标;xc为第三基准点c在车体坐标系下的x坐标。
[0121]
将图2c中,的区域,即两车门侧(即左侧和右侧)阴影区域作为倒车直行关联的危险区域的第二子区域和第三子区域。其中,为目标障碍物在车体坐标系下的x坐标;xb为第二基准点b在车体坐标系下的x坐标;xc为第三基准点c在车体坐标系下的x坐标。
[0122]
若车辆行驶方向为向前转弯或倒车转弯,则根据车辆上预设基准点中第二基准点b和第三基准点c的位置信息,确定车辆行驶方向关联的危险区域。
[0123]
具体的,如图2d所示,根据第二基准b点和第三基准点c的位置信息,确定向前转弯关联的危险区域的方式为:
[0124]
将图2d中,的区域,即图2d中环形区域efgh作为直行右转关联的危险区域的第一子区域。其中,为目标障碍物在车体坐标系下的x坐标;xa为第二基准点a在车体坐标系下的x坐标。
[0125]
将图2d中,的区域,即图2d中bc左侧阴影区域和环形区域dehi,分别作为直行右转关联的危险区域的第二子区域和第三子区域。其中,为目标障碍物在车体坐标系下的x坐标;xa为第一基准点a在车体坐标系下的x坐标;xc为第三基准点c在车体坐标系下的x坐标。
[0126]
需要说明的是,向前左转弯关联的危险区域的确定方式与上述向前右转弯关联的危险区域的确定方式类似,只需将向前右转弯关联的危险区域沿x轴对称即可,在此不进行赘述。
[0127]
如图2e所示,根据第二基准点b和第三基准点c的位置信息,确定倒车转弯关联的
危险区域的方式为:
[0128]
将图2e中,的区域,即图2e中环形区域cikj作为倒车右转关联的危险区域的第一子区域。其中,为目标障碍物在车体坐标系下的x坐标;xc为第三基准点c在车体坐标系下的x坐标。
[0129]
将图2e中,的区域,即图2e中ie右侧阴影区域和环形区域mnbf,分别作为倒车右转关联的危险区域的第二子区域和第三子区域。其中,为目标障碍物在车体坐标系下的x坐标;xa为第一基准点a在车体坐标系下的x坐标;xc为第三基准点c在车体坐标系下的x坐标。
[0130]
需要说明的是,倒车左转弯关联的危险区域的确定方式与上述倒车右转弯关联的危险区域的确定方式类似,只需将倒车右转弯关联的危险区域沿x轴对称即可,在此不进行赘述。
[0131]
本实施例针对不同车辆行驶方向,选择不同的预设基准点来确定不同车辆行驶方向对应的危险区域,通过减少预设基准点的使用数量,可以降低危险区域确定过程的复杂度,同时还能够保证危险区域确定的全面性和准确性。
[0132]
s302,根据车辆周围障碍物的位置信息和危险区域,从车辆周围障碍物中确定目标障碍物。
[0133]
其中,车辆周围障碍物为车身四周一定范围内所包含的所有障碍物。即通过超声波传感器和视觉感知设备采集的环境数据中包含的所有障碍物。车辆周围障碍物的位置信息可以基于采集的环境数据来确定。
[0134]
可选的,本实施例可以依次基于每一车辆周围障碍物的位置坐标,如x轴坐标,来判断该车辆周围障碍物是否落入s301确定的危险区域中,若落入,则将该车辆周围障碍物作为目标障碍物。
[0135]
s303,根据车辆行驶方向,从车辆上预设基准点中选择目标基准点,以及确定车辆行驶方向关联的距离计算参数。
[0136]
s304,根据目标基准点的位置信息、距离计算参数,以及目标障碍物的位置信息,确定目标障碍物与车辆之间的间隔距离。
[0137]
s305,根据目标障碍物与车辆之间的间隔距离,控制车辆行驶。
[0138]
本公开实施例的方案,根据车辆行驶方向和车辆上预设基准点的位置信息,确定车辆行驶方向关联的危险区域,进而将位于危险区内的车辆周围障碍物作为目标障碍物,来计算目标障碍物与车辆之间的间隔距离。本方案在从车辆周围障碍物中筛选目标障碍物时,以障碍物位置为驱动,而非以车辆四周位置为驱动,即首先判断每个障碍物的位置坐标,影响车辆驾驶安全的障碍物才被挑选出作为目标障碍物,进行后续间隔距离的计算,其他无关障碍物不被纳入考虑。通过将障碍物筛选前置,可有效节约系统消耗,相比于按车辆四周区域划分筛选障碍物的策略,本方案更加适应工程实践。且转弯时根据转弯半径和中心,将车身侧方覆盖区域也纳入危险区域,可精准有效保护车身侧方不被障碍物碰撞,进一步保证了车辆驾驶的安全性。
[0139]
图4是根据本公开实施例的一种车辆控制方法的示意图,本公开实施例在上述实施例的基础上,进一步对如何根据目标障碍物与车辆之间的间隔距离,控制车辆行驶进行
详细解释说明,如图4所示,本实施例提供的车辆控制方法可以包括:
[0140]
s401,根据车辆行驶方向,从车辆上预设基准点中选择目标基准点,以及确定车辆行驶方向关联的距离计算参数。
[0141]
s402,根据目标基准点的位置信息、距离计算参数,以及目标障碍物的位置信息,确定目标障碍物与车辆之间的间隔距离。
[0142]
s403,根据目标障碍物与车辆之间的间隔距离,从目标障碍物中确定碰撞障碍物。
[0143]
其中,碰撞障碍物是基于该车辆行驶方向运行的过程中,首先与车辆发送碰撞的目标障碍物。
[0144]
可选的,本实施例根据目标障碍物与车辆之间的间隔距离,从目标障碍物中确定碰撞障碍物时,可以是将各目标障碍物与车辆之间的间隔距离进行比较,将与车辆间隔距离最小的目标障碍物作为碰撞障碍物。
[0145]
s404,根据制动距离,以及碰撞障碍物与车辆之间的间隔距离,控制车辆行驶。
[0146]
其中,制动距离为车辆从当前行驶状态到停止时,所需的最短刹车距离,即从下发制动指令到车辆停止需要的距离。可选的,本实施例的制动距离可以是预先设置的固定值,也可以是根据车辆行驶数据(如行驶速度、加速度和方向盘扭矩等)实时更新的。
[0147]
可选的,本实施例的制动距离可以是一个,也可以是多个,若制动距离为一个时,可以是在碰撞障碍物与车辆之间的间隔距离小于制动距离时,立即下发制动指令,控制车辆在碰撞到障碍物前停止,否则控制车辆继续按照车辆行驶数据行驶。
[0148]
若制动距离为多个时,可以基于多个制动距离划分多个距离区间,并为不同的距离区间配置不同的控制策略,后续可以通过判断碰撞障碍物与车辆之间的间隔距离所落入的距离区间,来确定对应的控制策略,并基于确定的控制策略来控制车辆行驶。例如,若制动距离为第一距离和第二距离,且第一距离小于第二距离,若碰撞障碍物与车辆之间的间隔距离小于第一距离,则说明碰撞障碍物与车辆距离较近,为了保证车辆驾驶安全,此时的控制策略为立即下发制动指令,控制车辆在碰撞到障碍物前停止。
[0149]
若碰撞障碍物与车辆之间的间隔距离大于第一距离,且小于第二距离,则说明障碍物与车辆距离不是特别近,但是也有碰撞的可能,为了保证车辆驾驶安全,此时的控制策略为立即下发减速指令,控制车辆降速行驶。
[0150]
可选的,若本实施例的制动距离为动态实时变化的,则该制动距离的确定方式可以是:根据车辆在当前时刻的行驶速度、系统指令传输时延和制动减速度,确定车辆在当前时刻的制动距离。
[0151]
具体的,可以是通过如下公式(21)来计算车辆在当前时刻的制动距离。
[0152]dbrake
=vt
delay
v2/|a
brake
|
ꢀꢀꢀꢀꢀ
(21)
[0153]
其中,d
brake
为车辆在当前时刻的制动距离;v为车辆在当前时刻的行驶速度;t
delay
为车辆在当前时刻的系统指令传输时延;|a
brake
为车辆在当前时刻的制动减速度。
[0154]
本方案根据车辆的实时行驶数据自适应更新刹车距离,以便根据碰撞障碍物与车辆之间的间隔距离,以及与制动距离决策触发紧急制动的最佳时机。以提高车辆控制的鲁棒性。
[0155]
本公开实施例的方案,根据车辆行驶方向、目标障碍物的位置信息和车辆上预设基准点的位置信息,确定出目标障碍物与车辆之间的间隔距离之后,基于该间隔距离,从目
标障碍物中筛选出碰撞障碍物,并根据碰撞障碍物与车辆之间的间隔距离,与制动距离之间的关系,来控制车辆行驶。本方案从多个目标障碍物中选出碰撞障碍物,与制动距离比较,控制车辆行驶,无需对每一目标障碍物都进行分析,提高了车辆控制的精准性和高效性。
[0156]
可选的,本实施例根据制动距离,以及碰撞障碍物与车辆之间的间隔距离,控制车辆行驶的另一种可实现方式为:根据车辆行驶模式、制动距离,以及碰撞障碍物与车辆之间的间隔距离,控制车辆行驶。
[0157]
其中,车辆行驶模式可以是车辆自动行驶时驾驶员所选择的模式,例如,可以包括但不限于:低速辅助驾驶、高速辅助驾驶和巡航记忆泊车等。
[0158]
本实施例在根据制动距离,以及碰撞障碍物与车辆之间的间隔距离制定车辆控制策略时,可以在进一步结合车辆行驶模式,确定出更为安全的车辆控制策略。例如,在目标障碍物与车辆之间的间隔距离小于制动距离的情况下,若车辆行驶模式为低速辅助驾驶或巡航记忆泊车,则可以立即下发制动指令,控制车辆在碰撞到障碍物前停止。若车辆行驶模式为高速辅助驾驶,此时为了避免紧急制动造成翻车的情况出现,可以下发减速指令,控制车辆通过点刹的方式,降低行驶速度后再制动。本方案基于制动距离,以及碰撞障碍物与车辆之间的间隔距离控制车辆时,考虑了车辆的行驶模式,进一步提高了车辆驾驶的安全性和鲁棒性。
[0159]
图5是根据本公开实施例提供的一种车辆控制装置的结构示意图,本公开实施例适用于控制自动驾驶车辆行驶的情况。尤其适用于在巡航记忆泊车或低速辅助驾驶场景下,控制自动驾驶车辆行驶的情况。该装置可以配置于自动驾驶车辆的控制设备中,采用软件和/或硬件来实现,该装置可以实现本公开任意实施例的车辆控制方法。如图5所示,该车辆控制装置500包括:
[0160]
基准点选择模块501,用于根据车辆行驶方向,从车辆上预设基准点中选择目标基准点;
[0161]
参数确定模块502,用于确定所述车辆行驶方向关联的距离计算参数;
[0162]
距离计算模块503,用于根据所述目标基准点的位置信息、所述距离计算参数,以及目标障碍物的位置信息,确定所述目标障碍物与所述车辆之间的间隔距离;
[0163]
车辆控制模块504,用于根据目标障碍物与车辆之间的间隔距离,控制车辆行驶。
[0164]
本公开实施例的方案,针对不同的车辆行驶方向,从预设基准点中选择不同的目标基准点,以及确定不同的距离计算参数,来根据目标基准点的位置信息,计算目标障碍物与车辆之间的间隔距离,进而基于该间隔距离,控制车辆行驶。相比于现有技术直接通过传感器,如超声波传感器来测量车辆与目标障碍物之间的间隔距离,极大的提高了障碍物与车辆之间的间隔距离确定的精准性,进而基于该精准的间隔距离控制车辆行驶,很好的保障了车辆自动驾驶的安全性和可靠性。
[0165]
进一步的,预设基准点包括:第一基准点、第二基准点、第三基准点和第四基准点;
[0166]
第一基准点为车辆俯视图中车头侧和车门侧之间的圆弧在车头侧的端点;
[0167]
第二基准点为圆弧在车门侧的端点;
[0168]
第三基准点为车辆俯视图中车尾侧和车门侧之间的交点;
[0169]
第四基准点为车辆俯视图中后车轴与车门侧的交点。
[0170]
进一步的,基准点选择模块501具体用于:
[0171]
若车辆行驶方向为向前直行,则选择车辆上预设基准点中的第一基准点和第二基准点,作为目标基准点;
[0172]
若车辆行驶方向为倒车直行,则选择车辆上预设基准点中的第二基准点和第三基准点,作为目标基准点;
[0173]
若车辆行驶方向为向前转弯,则选择车辆上预设基准点中的第一基准点、第二基准点和第三基准点,作为目标基准点;
[0174]
若车辆行驶方向为倒车转弯,则选择车辆上预设基准点中的第一基准点、第三基准点和第四基准点,作为目标基准点。
[0175]
进一步的,参数确定模块502具体用于:
[0176]
若车辆行驶方向为向前直行或倒车直行,则将安全距离阈值作为车辆行驶方向关联的距离计算参数;
[0177]
若车辆行驶方向为向前转弯,则将车体中心、转弯中心、圆弧直径延伸长度和安全距离阈值作为车辆行驶方向关联的距离计算参数;
[0178]
若车辆行驶方向为倒车转弯,则将车体中心、转弯中心和安全距离阈值作为车辆行驶方向关联的距离计算参数。
[0179]
进一步的,的车辆控制装置500,还包括:
[0180]
危险区域确定模块,用于根据车辆行驶方向和车辆上预设基准点的位置信息,确定车辆行驶方向关联的危险区域;
[0181]
目标障碍物筛选模块,用于根据车辆周围障碍物的位置信息和危险区域,从车辆周围障碍物中确定目标障碍物。
[0182]
进一步的,危险区域确定模块具体用于:
[0183]
若车辆行驶方向为向前转弯或倒车转弯,则根据车辆上预设基准点中第一基准点和第三基准点的位置信息,确定车辆行驶方向关联的危险区域;
[0184]
若车辆行驶方向为向前直行或倒车直行,则根据车辆上预设基准点中第二基准点和第三基准点的位置信息,确定车辆行驶方向关联的危险区域。
[0185]
进一步的,车辆控制模块502包括:
[0186]
碰撞障碍物筛选单元,用于根据目标障碍物与车辆之间的间隔距离,从目标障碍物中确定碰撞障碍物;
[0187]
车辆控制单元,用于根据制动距离,以及碰撞障碍物与车辆之间的间隔距离,控制车辆行驶。
[0188]
进一步的,车辆控制单元,具体用于:
[0189]
根据车辆行驶模式、制动距离,以及碰撞障碍物与车辆之间的间隔距离,控制车辆行驶。
[0190]
进一步的,车辆控制装置500,还包括:
[0191]
制动距离确定模块,用于根据车辆在当前时刻的行驶速度、系统指令传输时延和制动减速度,确定车辆在当前时刻的制动距离。
[0192]
上述产品可执行本公开任意实施例所提供的方法,具备执行方法相应的功能模块和有益效果。
[0193]
本公开的技术方案中,所涉及的车辆的行驶数据(如车速、行驶方向、位置信息等)、障碍物的位置信息以及车辆固有参数(如车辆中心点的位置坐标、基准点的位置坐标等)等的获取,存储和应用等,均符合相关法律法规的规定,且不违背公序良俗。
[0194]
根据本公开的实施例,本公开还提供了一种电子设备、一种可读存储介质和一种计算机程序产品。
[0195]
图6示出了可以用来实施本公开的实施例的示例电子设备600的示意性框图。电子设备旨在表示各种形式的数字计算机,诸如,膝上型计算机、台式计算机、工作台、个人数字助理、服务器、刀片式服务器、大型计算机、和其它适合的计算机。电子设备还可以表示各种形式的移动装置,诸如,个人数字助理、蜂窝电话、智能电话、可穿戴设备和其它类似的计算装置。本文所示的部件、它们的连接和关系、以及它们的功能仅仅作为示例,并且不意在限制本文中描述的和/或者要求的本公开的实现。
[0196]
如图6所示,设备600包括计算单元601,其可以根据存储在只读存储器(rom)602中的计算机程序或者从存储单元608加载到随机访问存储器(ram)603中的计算机程序,来执行各种适当的动作和处理。在ram 603中,还可存储设备600操作所需的各种程序和数据。计算单元y01、rom 602以及ram 603通过总线604彼此相连。输入/输出(i/o)接口605也连接至总线604。
[0197]
设备600中的多个部件连接至i/o接口605,包括:输入单元606,例如键盘、鼠标等;输出单元607,例如各种类型的显示器、扬声器等;存储单元608,例如磁盘、光盘等;以及通信单元609,例如网卡、调制解调器、无线通信收发机等。通信单元609允许设备600通过诸如因特网的计算机网络和/或各种电信网络与其他设备交换信息/数据。
[0198]
计算单元601可以是各种具有处理和计算能力的通用和/或专用处理组件。计算单元601的一些示例包括但不限于中央处理单元(cpu)、图形处理单元(gpu)、各种专用的人工智能(ai)计算芯片、各种运行机器学习模型算法的计算单元、数字信号处理器(dsp)、以及任何适当的处理器、控制器、微控制器等。计算单元601执行上文所描述的各个方法和处理,例如车辆控制方法。例如,在一些实施例中,该车辆控制方法可被实现为计算机软件程序,其被有形地包含于机器可读介质,例如存储单元608。在一些实施例中,计算机程序的部分或者全部可以经由rom 602和/或通信单元609而被载入和/或安装到设备600上。当计算机程序加载到ram 603并由计算单元601执行时,可以执行上文描述的车辆控制方法的一个或多个步骤。备选地,在其他实施例中,计算单元601可以通过其他任何适当的方式(例如,借助于固件)而被配置为执行车辆控制方法。
[0199]
本文中以上描述的系统和技术的各种实施方式可以在数字电子电路系统、集成电路系统、现场可编程门阵列(fpga)、专用集成电路(asic)、专用标准产品(assp)、芯片上系统的系统(soc)、复杂可编程逻辑设备(cpld)、计算机硬件、固件、软件、和/或它们的组合中实现。这些各种实施方式可以包括:实施在一个或者多个计算机程序中,该一个或者多个计算机程序可在包括至少一个可编程处理器的可编程系统上执行和/或解释,该可编程处理器可以是专用或者通用可编程处理器,可以从存储系统、至少一个输入装置、和至少一个输出装置接收数据和指令,并且将数据和指令传输至该存储系统、该至少一个输入装置、和该至少一个输出装置。
[0200]
用于实施本公开的方法的程序代码可以采用一个或多个编程语言的任何组合来
编写。这些程序代码可以提供给通用计算机、专用计算机或其他可编程数据处理装置的处理器或控制器,使得程序代码当由处理器或控制器执行时使流程图和/或框图中所规定的功能/操作被实施。程序代码可以完全在机器上执行、部分地在机器上执行,作为独立软件包部分地在机器上执行且部分地在远程机器上执行或完全在远程机器或服务器上执行。
[0201]
在本公开的上下文中,机器可读介质可以是有形的介质,其可以包含或存储以供指令执行系统、装置或设备使用或与指令执行系统、装置或设备结合地使用的程序。机器可读介质可以是机器可读信号介质或机器可读储存介质。机器可读介质可以包括但不限于电子的、磁性的、光学的、电磁的、红外的、或半导体系统、装置或设备,或者上述内容的任何合适组合。机器可读存储介质的更具体示例会包括基于一个或多个线的电气连接、便携式计算机盘、硬盘、随机存取存储器(ram)、只读存储器(rom)、可擦除可编程只读存储器(eprom或快闪存储器)、光纤、便捷式紧凑盘只读存储器(cd-rom)、光学储存设备、磁储存设备、或上述内容的任何合适组合。
[0202]
为了提供与用户的交互,可以在计算机上实施此处描述的系统和技术,该计算机具有:用于向用户显示信息的显示装置(例如,crt(阴极射线管)或者lcd(液晶显示器)监视器);以及键盘和指向装置(例如,鼠标或者轨迹球),用户可以通过该键盘和该指向装置来将输入提供给计算机。其它种类的装置还可以用于提供与用户的交互;例如,提供给用户的反馈可以是任何形式的传感反馈(例如,视觉反馈、听觉反馈、或者触觉反馈);并且可以用任何形式(包括声输入、语音输入或者、触觉输入)来接收来自用户的输入。
[0203]
可以将此处描述的系统和技术实施在包括后台部件的计算系统(例如,作为数据服务器)、或者包括中间件部件的计算系统(例如,应用服务器)、或者包括前端部件的计算系统(例如,具有图形用户界面或者网络浏览器的用户计算机,用户可以通过该图形用户界面或者该网络浏览器来与此处描述的系统和技术的实施方式交互)、或者包括这种后台部件、中间件部件、或者前端部件的任何组合的计算系统中。可以通过任何形式或者介质的数字数据通信(例如,通信网络)来将系统的部件相互连接。通信网络的示例包括:局域网(lan)、广域网(wan)、区块链网络和互联网。
[0204]
计算机系统可以包括客户端和服务器。客户端和服务器一般远离彼此并且通常通过通信网络进行交互。通过在相应的计算机上运行并且彼此具有客户端-服务器关系的计算机程序来产生客户端和服务器的关系。服务器可以是云服务器,又称为云计算服务器或云主机,是云计算服务体系中的一项主机产品,以解决了传统物理主机与vps服务中,存在的管理难度大,业务扩展性弱的缺陷。服务器也可以为分布式系统的服务器,或者是结合了区块链的服务器。
[0205]
人工智能是研究使计算机来模拟人的某些思维过程和智能行为(如学习、推理、思考、规划等)的学科,既有硬件层面的技术也有软件层面的技术。人工智能硬件技术一般包括如传感器、专用人工智能芯片、云计算、分布式存储、大数据处理等技术;人工智能软件技术主要包括计算机视觉技术、语音识别技术、自然语言处理技术及机器学习/深度学习技术、大数据处理技术、知识图谱技术等几大方向。
[0206]
云计算(cloud computing),指的是通过网络接入弹性可扩展的共享物理或虚拟资源池,资源可以包括服务器、操作系统、网络、软件、应用和存储设备等,并可以按需、自服务的方式对资源进行部署和管理的技术体系。通过云计算技术,可以为人工智能、区块链等
技术应用、模型训练提供高效强大的数据处理能力。
[0207]
应该理解,可以使用上面所示的各种形式的流程,重新排序、增加或删除步骤。例如,本公开中记载的各步骤可以并行地执行也可以顺序地执行也可以不同的次序执行,只要能够实现本公开公开的技术方案所期望的结果,本文在此不进行限制。
[0208]
上述具体实施方式,并不构成对本公开保护范围的限制。本领域技术人员应该明白的是,根据设计要求和其他因素,可以进行各种修改、组合、子组合和替代。任何在本公开的精神和原则之内所作的修改、等同替换和改进等,均应包含在本公开保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。