技术特征:
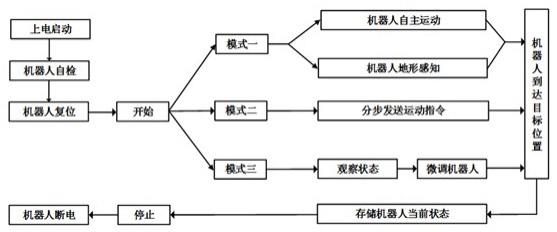
1.一种多模式少驱动张拉移动机器人控制系统,其特征在于:所述多模式少驱动张拉移动机器人控制系统设置有:传感器,与数据采集卡进行数据通讯,将采集到的数据传输到数据采集卡;数据采集卡,与控制器进行数据通讯,接收传感器采集到的外部数据信息和自身数据信息;控制器,与电机驱动器进行数据通讯,控制器结合外部数据信息和自身数据信息,调取到对应的运动步态,运动步态数据传输给电机驱动器;电机驱动器,与步进电机进行数据通讯,将运动步态数据转化为步进电机控制指令,将控制指令传输到步进电机;步进电机,为执行单元,控制指令控制步进电机的主轴输出;编码器,与控制器进行数据通讯,将步进电机的输出信息传输到控制器。2.根据权利要求1所述的多模式少驱动张拉移动机器人控制系统,其特征在于:所述传感器包括激光测距传感器、力矩传感器,激光测距传感器采集移动机器人识别外部地形特征,力矩传感器检测采集移动机器人自身的运动状态信息。3.根据权利要求1所述的多模式少驱动张拉移动机器人控制系统,其特征在于:所述力矩传感器包括力矩传感器1、力矩传感器2,力矩传感器1采集步进电机1的运动状态信息,力矩传感器2采集步进电机2的运动状态信息。4.根据权利要求1所述的多模式少驱动张拉移动机器人控制系统,其特征在于:所述控制器包括嵌入式主控制模块、步进电机驱动模块、变压模块、电机接口、电源接口模块、主机开关。5.根据权利要求4所述的多模式少驱动张拉移动机器人控制系统,其特征在于:所述嵌入式主控制模块包括控制指令接收模块、控制算法模块、运动控制模块;控制指令接收模块,接收红外控制器外部输入的控制指令;控制算法模块,用于机器人识别外部环境地形特征,并自适应切换相应的运动步态;运动控制模块,用于给出张拉移动机器人运动指令。6.根据权利要求5所述的多模式少驱动张拉移动机器人控制系统,其特征在于:所述运动步态包括蠕动运动步态、尺蠖运动步态以及翻滚运动步态,所述运动步态为对步进电机1、步进电机2的转速、转向、周期、启停控制的数据集合。7.根据权利要求5所述的多模式少驱动张拉移动机器人控制系统,其特征在于:所述控制指令包括机器人运动状态控制、电机转速控制、设定驱动芯片电流保护、读取电机状态信息、读取flash表指定位、修改flash表指定位、flash表恢复默认值。8.一种多模式少驱动张拉移动机器人控制系统的控制方法,其特征在于:包括以下步骤:(a)运动前启动自检(b)设定张拉移动机器人运动模式(c)机器人在运动模式下进行运动(d)检测运动过程中的外部地形特征(e)机器人到达目标位置(f)存储机器人当前状态
(g)停止。9.根据权利要求8所述的多模式少驱动张拉移动机器人控制系统的控制方法,其特征在于:步骤(b)中设定张拉移动机器人运动模式,其运动模式包括自主识别运动模式、指令操控运动模式、状态调整运动模式。10.根据权利要求9所述的多模式少驱动张拉移动机器人控制系统的控制方法,其特征在于:所述自主识别运动模式中包括对当前运动步态的判断,判断是否需要切换运动步态,所述运动步态包括蠕动运动步态、尺蠖运动步态、翻滚运动步态。
技术总结
本发明公开了一种多模式少驱动张拉移动机器人控制系统及控制方法,其控制系统设置有传感器,数据采集卡,控制器,电机驱动器,步进电机,编码器;其控制方法,包括以下步骤:运动前启动自检;设定张拉移动机器人运动模式;机器人在运动模式下进行运动;检测运动过程中的外部地形特征;机器人到达目标位置;存储机器人当前状态;停止。本发明控制系统满足小型化要求且开发难度和成本低,将机器人多种步态的代码进行存储,简单调用即可下发控制指令。本发明通过预置机器人三种不同运动步态,配合传感系统感知不同地形特征而切换相应的步态,实现张拉移动机器人在多种地形环境中运动,同时控制系统无系留设计,满足野外环境的续航要求。求。求。
技术研发人员:孙涛 刘鑫俣 杨琪 于泽 连宾宾 宋轶民
受保护的技术使用者:天津大学
技术研发日:2022.04.07
技术公布日:2022/7/12
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。