液体消耗系统和递送系统
1.本技术是申请日为2018年12月25日、发明名称为“液体消耗系统和递送系统”且申请号为201880083672.x的中国发明专利申请的分案申请。
技术领域
2.本公开涉及液体消耗装置、液体消耗系统和递送系统,所述液体消耗装置、液体消耗系统和递送系统进行对其中存储有液体的盒的订购。
背景技术:
3.已知用于订购其中存储有液体(诸如墨)的盒的方法、控制装置和程序。盒被安装在液体消耗装置(诸如打印机或多功能外围设备)中,以将液体供应到液体消耗装置。
4.在相关技术的订购方法中,获得指示盒中的液体的剩余量的剩余量信息,以估计存储在盒中的液体用完的日期。接下来,基于估计出的日期来确定液体保留在盒中的预定日期。此外,在已确定的预定日期订购新盒。因此,直到存储在被安装在液体消耗装置中的盒中的液体用完,才将新的盒递送给液体消耗装置的使用者。
5.引文列表
6.专利文献
7.专利文献1:jp2017-47537a
8.专利文献2:jp2003-15477a
技术实现要素:
9.技术问题
10.在上述相关技术的订购方法等中,作为确定订购的下单日期的基础的剩余量信息指示被安装在液体消耗装置中的盒中的液体的剩余量。
11.问题的解决方案
12.本公开提供了一种用于基于除了盒中的液体的剩余量以外包括的信息来确定盒的订购日期的方法。
13.本公开的说明性方面提供了一种液体消耗系统,该液体消耗系统包括:安装壳体,该安装壳体被构造成接收盒,该盒具有存储液体的第一液体室;罐,所述罐包括第二液体室;流路,所述流路被构造成与所述第二液体室及被安装在所述安装壳体中的所述盒的所述第一液体室连通;头,所述头与所述第二液体室连通;第一通信接口;和控制器系统,所述控制器系统被构造成:确定剩余量,所述剩余量至少包括在所述罐的所述第二液体室中的液体量;确定已确定的所述剩余量是否达到预定量;并且基于确定出已确定的所述剩余量达到所述预定量,通过所述第一通信接口传输第一信息,所述第一信息指示所述盒的订购指令。
14.本公开的另外的说明性方面提供了一种液体消耗系统,该液体消耗系统包括:安装壳体,所述安装壳体被构造成接收盒,所述盒包括存储液体的第一液体室;罐,所述罐包
括第二液体室;流路,所述流路被构造成与所述第二液体室及被安装在所述安装壳体中的所述盒的所述第一液体室连通;头,所述头与所述第二液体室连通;液位传感器;第一通信接口;和控制器系统,所述控制器系统被构造成:在所述第二液体室中的液位的位置等于或高于预定位置的情况下,从所述液位传感器接收第一信号;在所述第二液体室中的所述液位的所述位置低于所述预定位置的情况下,从所述液位传感器接收第二信号;并且基于在接收到所述第一信号之后从所述液位传感器接收到所述第二信号,通过所述第一通信接口传输第一信息,所述第一信息指示所述盒的订购指令。
15.本公开的另外的说明性方面提供一种递送系统,该递送系统包括:根据一种所述液体消耗系统的液体消耗系统;和服务器,所述服务器包括控制器和通信接口,其中所述服务器的所述控制器被构造成:通过所述服务器的所述通信接口接收从所述液体消耗系统传输的所述第一信息;并且当接收到所述第一信息时,创建关于所述盒的递送布置的信息。
16.发明的有益效果
17.根据本公开,能够基于包括盒中的液体剩余量的信息来确定订购盒的日期。
附图说明
18.图1a和图1b示出了根据第一说明性实施例的递送系统的构造图;
19.图2a和图2b是打印机的外观图,其中图2a示出了盖处于覆盖位置的状态,并且图2b示出了盖处于打开位置的状态;
20.图3是示意性地示出打印机的内部结构的示意性截面图;
21.图4是安装壳体的纵向截面图;
22.图5a和图5b是示出盒的结构的图,其中图5a是前透视图,并且图5b是纵向截面图;
23.图6是示出盒被安装在安装壳体中的状态的纵向截面图;
24.图7是根据第一说明性实施例的打印过程的流程图;
25.图8a是第一更新过程的流程图,图8b是第二更新过程的流程图,图8c是第三更新过程的流程图,并且图8d是第四更新过程的流程图;
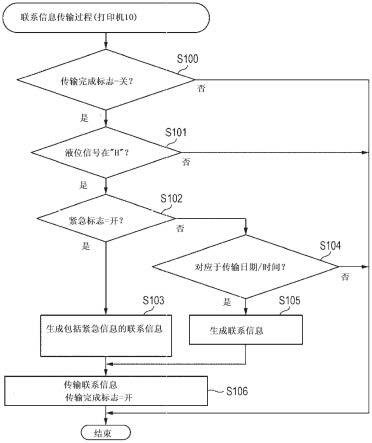
26.图9是联系信息传输过程的流程图;
27.图10a是订购信息传输过程的流程图,并且图10b是发送信息生成过程的流程图;
28.图11a是根据第二说明性实施例的打印过程的流程图,并且图11b1和图11b2示出了根据第二说明性实施例的第五更新过程的流程图;
29.图12是根据第二说明性实施例的联系信息传输过程的流程图;
30.图13是根据第一变型的联系信息传输过程的流程图;
31.图14是根据第二变型的联系信息传输过程的流程图;并且
32.图15是根据第三变型的联系信息传输过程的流程图。
33.附图标记列表
[0034]5ꢀꢀꢀ
递送系统
[0035]
10
ꢀꢀ
打印机
[0036]
21
ꢀꢀ
头
[0037]
30
ꢀꢀ
时钟
[0038]
31
ꢀꢀ
通信i/f
[0039]
33
ꢀꢀ
液位传感器
[0040]
36
ꢀꢀ
存储部
[0041]
40
ꢀꢀ
信息收集服务器
[0042]
42
ꢀꢀ
存储部
[0043]
43
ꢀꢀ
通信i/f
[0044]
44
ꢀꢀ
通信i/f
[0045]
45
ꢀꢀ
控制器
[0046]
46
ꢀꢀ
程序存储区
[0047]
48
ꢀꢀ
时钟
[0048]
50
ꢀꢀ
发送服务器
[0049]
53
ꢀꢀ
通信i/f
[0050]
55
ꢀꢀ
控制器
[0051]
130 控制器
[0052]
150 安装壳体
[0053]
160 罐
[0054]
171 液体室
[0055]
190 致动器
[0056]
200 盒
[0057]
210 液体室
具体实施方式
[0058]
下面将描述本公开的说明性实施例。注意,以下描述的说明性实施例仅是本公开的示例,并且可以在不脱离本公开的精神的情况下被适当地修改。此外,可以在本公开的范围内适当地改变以下过程的执行顺序。
[0059]
《第一说明性实施例》
[0060]
在第一说明性实施例中,描述了图1和图2中所示的递送系统5。递送系统5包括打印机10和信息收集服务器40,该信息收集服务器40从一个或多个打印机10收集信息。打印机10和信息收集服务器40通过诸如因特网的通信线路6连接。打印机10和信息收集服务器40可以通过使用诸如tcp/ip的通信协议来彼此通信。另外,信息收集服务器40可以将信息传输到通过通信线路6接收订购的发送服务器50。打印机10和信息收集服务器40是本公开的液体消耗系统的示例。打印机10是液体消耗装置的一个示例。信息收集服务器40是信息处理装置的一个示例。发送系统5是服务器的一个示例。
[0061]
(打印机的概述)
[0062]
图2a和图2b中所示的打印机10是喷墨打印机,该喷墨打印机排出墨滴以在片材上打印图像。打印机10可以是具有传真功能、扫描功能、复印功能等的多功能外围设备。
[0063]
在下文中,参照以可使用的方式安装在水平平面中的打印机10的使用姿势来定义上下方向7,以其上形成有打印机10的开口13作为前表面的表面来定义前后方向8,并且在从前表面观察打印机10时定义左右方向9。也就是说,使用姿势中的上下方向7对应于竖直方向,并且前后方向8以及左右方向9对应于水平方向。前后方向8和左右方向9彼此正交。
[0064]
打印机10包括具有大致长方体形状的外壳14。如图3和图4中所示,进给托盘15、进给辊23、输送辊25、具有多个喷嘴29的头21、压板26、排出辊27、排出托盘16、安装壳体150和罐160位于外壳14内部。
[0065]
打印机10驱动进给辊23和输送辊25,以将由进给托盘15支撑的片材输送到压板26的位置。接下来,打印机10将墨(该墨是从罐160通过管19供应的)通过喷嘴29排出到头21。因此,墨落在由压板26支撑的片材上,并且图像被打印在片材上。然后,打印机10驱动排出辊27,以将其上打印有图像的片材排出到排出托盘16。
[0066]
更具体地,头21可以被安装在托架20上,该托架20沿着主扫描方向(平行于左右方向9)往复运动,该主扫描方向与通过输送辊25输送片材的片材输送方向相交。传输了马达(未示出)的驱动力,使得托架20沿着主扫描方向(与图3的纸面垂直的方向)移动。在停止通过输送辊25输送片材的同时,通过使托架20沿着主扫描方向移动,打印机10通过喷嘴29将墨排出到头21。因此,在片材的面对头21的局部区域上打印出图像(下文中被称为“一次通过”)。接下来,打印机10使输送辊25输送片材,使得片材的下一个图像打印区域面对头21。然后,这些过程被交替且重复地执行,并且因此将图像打印在一张片材上。
[0067]
(显示器)
[0068]
外壳14包括显示器28。显示器28位于外壳14的前表面中。显示器28是所谓的触摸面板,在该触摸面板中,触摸传感器被布置在显示面板上。然而,代替显示器28或与显示器28一起,显示面板和按钮可以位于外壳14的前表面中。显示器28接收来自用户的输入。
[0069]
(盖)
[0070]
如图2a和图2b中所示,在外壳14的前表面14a上,在左右方向9上的右端处形成开口85。外壳14还包括盖87。盖87能够在覆盖位置(图2a中所示的位置)和打开位置(图2b中所示的位置)之间旋转,在该覆盖位置处开口85被覆盖,在该打开位置处开口85被露出。盖87由外壳14支撑,以能够例如在外壳14的在上下方向7上的下端附近绕沿着左右方向9的旋转轴线旋转。然后,其中安装有盒200的安装壳体150位于容纳空间86中,该容纳空间86被设置在外壳14内部并且从开口85向后扩展。
[0071]
(安装壳体)
[0072]
如图4中所示,安装壳体150包括触点152、杆153、安装传感器32、液位传感器33和锁定销156。安装壳体150可以容纳四个盒200,这四个盒200对应于相应的黑色、青色、品红色和黄色。
[0073]
也就是说,安装壳体150包括与四个盒200对应的四个触点152、四个杆153、四个安装传感器32和四个液位传感器33。可以被容纳在安装壳体150中的盒200的数目不限于四个,并且可以容纳一个盒或者五个或更多个盒。
[0074]
安装壳体150具有盒子形状,其具有内部空间,已安装的盒200被容纳在该内部空间中。安装壳体150的内部空间由限定上端的顶壁、限定下端的底壁、限定在前后方向8上的后端的内壁以及限定在左右方向9上的两端的一对侧壁所限定。另一方面,开口85被定位成面对安装壳体150的内壁。也就是说,当盖87被设置在打开位置处时,开口85将安装壳体150的内部空间暴露于打印机的外部。
[0075]
然后,通过外壳14的开口85将盒200安装在安装壳体150中以及将盒200从安装壳体150中拉出。更具体地,盒200在前后方向8上向后穿过开口85,并且被安装在安装壳体150
中。被从安装壳体150中拉出的盒200在前后方向8上向前穿过开口85。
[0076]
(触点)
[0077]
触点152位于安装壳体150的顶壁上。触点152从顶壁朝向安装壳体150的内部空间向下突出。在将盒200安装在安装壳体150中的状态下,触点152被定位成与盒200的电极248(将在下文描述)接触。触点152具有导电性并且能够沿着上下方向7弹性变形。触点152电连接到控制器130。
[0078]
(杆)
[0079]
杆153从安装壳体150的内壁向前突出。杆153位于安装壳体150的内壁上且在接头180(将在下文描述)的上方。在将盒200安装在安装壳体150上的过程中,杆153通过盒200的空气连通口221(将在下文描述)进入空气阀室214。当杆153进入空气阀室214时,该空气阀室214(将在下文描述)与空气连通。
[0080]
(安装传感器)
[0081]
安装传感器32位于安装壳体150的顶壁上。安装传感器32是用于检测盒200是否被安装在安装壳体150中的传感器。安装传感器32包括光发射部和光接收部,该光发射部和光接收部在左右方向9上彼此分开。在盒200被安装在安装壳体150中的状态下,盒200的遮光肋245(将在下文描述)位于安装传感器32的光发射部和光接收部之间。换句话说,安装传感器32的光发射部和光接收部被定位成相对于安装在安装壳体150中的盒200的遮光肋245彼此相反。
[0082]
安装传感器32根据光接收部是否接收到从光发射部沿着左右方向9照射的光而输出不同的信号(下文中被称为“安装信号”)。例如,当光接收部接收到的光的强度低于阈值强度时,安装传感器32向控制器130输出低电平信号。同时,当光接收部接收到的光的强度等于或高于阈值强度时,安装传感器32将高电平信号输出到控制器130,该高电平信号具有比低电平信号的信号强度高的信号强度。
[0083]
(液位传感器)
[0084]
液位传感器33是用于检测致动器190(将在下文描述)的检测目标部194是否位于检测位置处的传感器。液位传感器33包括在左右方向9上彼此分开的光发射部和光接收部。换句话说,当检测目标部194位于检测位置处时,检测目标部194位于液位传感器33的光发射部和光接收部之间。另一方面,当检测目标部194未位于检测位置处时,检测目标部194位于液位传感器33的光发射部和光接收部之间。液位传感器33根据从光发射部输出的光是否被光接收部接收而输出不同的信号。例如,当光接收部接收到的光的强度低于阈值强度时,液位传感器33向控制器130输出低电平信号。同时,当光接收部接收到的光的强度等于或高于阈值强度时,液位传感器33将高电平信号输出到控制器130,该高电平信号具有比低电平信号的信号强度高的信号强度。
[0085]
(锁定销)
[0086]
锁定销156是在安装壳体150的内部空间的上端处且在开口85附近沿着左右方向9延伸的杆状构件。锁定销156的在左右方向9上的两端被固定到安装壳体150的一对侧壁。锁定销156在左右方向9上延伸跨过可以容纳四个盒200的四个空间。锁定销156用于将安装在安装壳体150中的盒200保持在图6中所示的安装位置处。在盒200被安装在安装壳体150中的状态下,盒200被固定到锁定销156。
[0087]
(罐)
[0088]
打印机10包括与四个盒200对应的四个罐160。具体地,打印机10包括:其中存储有品红色墨的罐160,该罐160对应于其中存储有品红色墨的盒200;其中存储有青色墨的罐160,该罐160对应于其中存储有青色墨的盒200;其中存储有黄色墨的罐160,该罐160对应于其中存储有黄色墨的盒200;其中存储有黑色墨的罐160,该罐160对应于其中存储有黑色墨的盒200。四个罐160具有大致相同的构造,并且将描述一个罐160。
[0089]
罐160位于安装壳体150的内壁的后方。如图4中所示,罐160包括上壁161、前壁162、下壁163、后壁164和一对侧壁(未示出)。前壁162包括在前后方向8上彼此偏离的多个壁。液体室171被形成在罐160的内部。液体室171是第二液体室的示例。
[0090]
在形成罐160的壁中,至少与液位传感器33面对的壁具有透光性。因此,从液位传感器33输出的光可以穿透面对液位传感器33的壁。后壁164的至少一部分可以由被焊接到上壁161、下壁163和侧壁的端面的膜形成。另外,罐160的侧壁可以与安装壳体150共用,或者可以独立于安装壳体150。此外,在左右方向9上彼此相邻的罐160由分隔壁(未示出)分隔。
[0091]
液体室171通过流出口174与墨流路(未示出)连通。流出口174的下端由限定液体室171的下端的下壁163所限定。流出口174位于接头180下方(更具体是位于通孔184的下端的下方)。与流出口174连通的墨流路(未示出)与管19连通。因此,液体室171从流出口174通过墨流路和管19与头21连通。也就是说,存储在液体室171中的墨通过墨流路和管19从流出口174被供应到头21。在与流出口174连通的墨流路和管19中,一端(流出口174)与液体室171连通,并且另一端89(见图3)与头21连通。
[0092]
液体室171通过空气连通室175与空气连通。更具体地,空气连通室175通过穿透前壁162的通孔176与液体室171连通。另外,空气连通室175通过空气连通口177和连接到空气连通口177的管(未示出)与打印机10的外部连通。也就是说,在空气连通室175中,一端(通孔176)与液体室171连通,并且另一端(空气连通口177)与打印机10的外部连通。空气连通室175通过空气连通口177和管(未示出)与空气连通。
[0093]
(接头)
[0094]
如图4中所示,接头180包括针181和引导件182。针181是其中形成有流路的管。针181从限定液体室171的前壁162向前突出。
[0095]
在针181的末端处形成有开口183。另外,针181的内部空间通过穿透前壁162的通孔184与液体室171连通。在针181中,一端(开口183)与罐160的外部连通,并且另一端(通孔184)与液体室171连通。引导件182是绕针181设置的筒形构件。引导件182从前壁162向前突出。引导件182的前端是敞开的。
[0096]
阀185和螺旋弹簧186位于针181的内部空间中。在针181的内部空间中,阀185能够在关闭位置和打开位置之间在前后方向8上移动。当阀185位于关闭位置处时,阀185关闭开口183。此外,当阀185位于打开位置处时,阀185打开开口183。螺旋弹簧186在从打开位置到关闭位置的移动方向上(即,在前后方向8上向前)推压阀185。针181的内部空间是流路的一个示例。
[0097]
(致动器)
[0098]
如图4中所示,致动器190位于液体室171中。致动器190由设置在液体室171中的支
撑构件(未示出)支撑,从而能够在箭头198和199的方向上旋转。致动器190能够在图4中的实线所指示的位置和虚线所指示的位置之间旋转。此外,通过止挡器(未示出;例如,液体室171的内壁)来防止致动器190从实线的位置在箭头198的方向上旋转。致动器190包括浮子191、轴192、臂193和检测目标部194。致动器190是检测对象的一个示例。
[0099]
浮子191由具有比存储在液体室171中的墨的比重小的比重的材料形成。轴192从浮子191的左右两侧在左右方向9上突出。轴192被插入到形成在支撑构件中的孔(未示出)中。因此,致动器190由支撑构件支撑,从而能够绕轴192旋转。臂193从浮子191大致向上延伸。检测目标部194位于臂193的末端处。也就是说,臂193位于检测目标部194和轴192之间。检测目标部194是分别在上下方向7上和前后方向8上延伸的板状构件。检测目标部194由遮挡从液位传感器33的光发射部输出的光的材料或颜色形成。
[0100]
当存储在液体室171中的墨的液位等于或高于参考位置p时,通过浮力在箭头198的方向上旋转的致动器190由止挡器保持在图4中由实线所指示的检测位置处。另一方面,当墨的液位低于参考位置p时,随着液位的降低,致动器190在箭头199的方向上旋转。因此,致动器190的检测目标部194移动到检测位置之外的位置。检测目标部194是致动器190的一部分,因此检测目标部194移动至与液体室171中所容纳的墨量对应的位置。
[0101]
参考位置p在上下方向7上具有与针181的轴向中心相同的高度,并且具有与墨供应口234(将在下文描述)的中心相同的高度。然而,参考位置p不限于该位置,只要其在上下方向7上位于流出口174的上方即可。作为另一个示例,参考位置p可以具有针181的内部空间的上端或下端的高度,或者可以具有墨供应口234的上端或下端的高度。
[0102]
当存储在液体室171中的墨的液位等于或高于参考位置p时,从液位传感器33的光发射部输出的光由位于检测位置处的检测目标部194遮挡。由此,由于从光发射部输出的光没有到达光接收部,因此液位传感器33向控制器130输出低电平信号。另一方面,当存储在液体室171中的墨的液位低于参考位置p时,由于从光发射部输出的光到达了光接收部,因此液位传感器33向控制器130输出高电平信号。也就是说,控制器130能够根据从液位传感器33输出的信号检测存储在液体室171中的墨的液位是否等于或高于参考位置p。参考位置p是预定位置的一个示例。低电平信号“l”是第一信号的一个示例,并且高电平信号“h”是第二信号的一个示例。在下文中,有时可以将低电平信号描述为“l”,并且将高电平信号描述为“h”。
[0103]
(盒)
[0104]
盒200是包括液体室210(见图3)的容器,该液体室210在该液体室210中存储有作为液体的墨。液体室210是第一液体室的一个示例。
[0105]
液体室210例如由树脂壁限定。如图5a中所示,盒200具有扁平的形状,在该形状中,在上下方向7上和在前后方向8上的尺寸大于在左右方向9上的尺寸。能够存储其它颜色的墨的盒200可以具有相同的外形或不同的外形。形成盒200的壁的至少一部分具有透光性。因此,用户能够从盒200的外部视觉上识别存储在盒200的液体室210中的墨的液位。
[0106]
盒200包括外壳201和供应管230。外壳201形成有后壁202、前壁203、上壁204、下壁205和一对侧壁206和207。后壁202包括在前后方向8上彼此偏离的多个壁。此外,上壁204包括在上下方向7上彼此偏离的多个壁。此外,下壁205包括在上下方向7上彼此偏离的多个壁。
[0107]
如图5b中所示,在盒200的内部空间中,形成有液体室210、墨阀室213和空气阀室214。液体室210包括上部液体室211和下部液体室212。上部液体室211、下部液体室212和空气阀室214是外壳201的内部空间。另一方面,墨阀室213是供应管230的内部空间。液体室210存储墨。空气阀室214允许盒200的外部和液体室210彼此连通。
[0108]
液体室210的上部液体室211和下部液体室212通过分隔壁215在上下方向7上彼此分开,该分隔壁215分隔外壳201的内部空间。然后,上部液体室211和下部液体室212通过形成在分隔壁215中的通孔216彼此连通。另外,上部液体室211和空气阀室214通过分隔壁217彼此分开,该分隔壁217分隔外壳201的内部空间。然后,上部液体室211和空气阀室214通过形成在分隔壁217中的通孔218彼此连通。此外,墨阀室213通过通孔219与下部液体室212的下端连通。
[0109]
空气阀室214通过形成在后壁202中且在盒200的上部处的空气连通口221与盒200的外部连通。也就是说,在空气阀室214中,一端(通孔218)与液体室210(更具体是上部液体室211)连通,并且另一端(空气连通口221)与盒200的外部连通。空气阀室214通过空气连通口221与空气连通。另外,阀222和螺旋弹簧223位于空气阀室214中。阀222能够在关闭位置和打开位置之间在前后方向8上移动。当阀222位于关闭位置处时,阀222关闭空气连通口221。此外,当阀222位于打开位置处时,阀222打开空气连通口221。螺旋弹簧223在从打开位置到关闭位置的移动方向上(即,在前后方向8上向后)推压阀222。
[0110]
在将盒200安装在安装壳体150上的过程中,杆153通过空气连通口221进入空气阀室214。已经进入空气阀室214的杆153使位于关闭位置处的阀222克服螺旋弹簧223的推压力而在前后方向8上向前移动。然后,随着阀222移动到打开位置,上部液体室211与空气连通。用于打开空气连通口221的构造不限于以上示例。作为另一个示例,可以采用杆153冲破将空气连通口221密封的膜的构造。
[0111]
供应管230在外壳201的下部中从后壁202在前后方向8上向后突出。供应管230的后端是敞开的。也就是说,墨阀室213允许通过通孔219连通的液体室210与盒200的外部彼此连通。在墨阀室213中,一端(通孔219)与液体室210(更具体是下部液体室212)连通,并且另一端(墨供应口234(将在下文描述))与盒200的外部连通。另外,垫圈231、阀232和螺旋弹簧233位于墨阀室213中。
[0112]
在垫圈231的中央处,形成有在前后方向8上穿透的墨供应口234。墨供应口234的内径比针181的外径稍小。阀232能够在关闭位置和打开位置之间在前后方向8上移动。当阀232位于关闭位置处时,阀232与垫圈231形成接触并且关闭墨供应口234。此外,当阀232位于打开位置处时,阀232与垫圈231分开并且打开墨供应口234。螺旋弹簧233在从打开位置到关闭位置的移动方向上(即,在前后方向8上向后)推压阀232。此外,螺旋弹簧233的推压力大于螺旋弹簧186的推压力。
[0113]
在将盒200安装在安装壳体150上的过程中,供应管230进入引导件182,并且针181最终通过墨供应口234进入墨阀室213。此时,针181在使垫圈231弹性变形的同时与限定墨供应口234的内周表面液密接触。当盒200被进一步插入到安装壳体150中时,针181使阀232克服螺旋弹簧233的推压力而向前移动。另外,阀232使从针181的开口183突出的阀185克服螺旋弹簧186的推压力而向后移动。
[0114]
因此,如图6中所示,墨供应口234和开口183被打开,并且供应管230的墨阀室213
与针181的内部空间连通。
[0115]
在盒200被安装在安装壳体150中的状态下,当在水平方向上观察时,液体室210的一部分和液体室171的一部分彼此重叠。此外,液体室171的底部位于液体室210的底部的下方。作为结果,由于存储在液体室210中的墨的水头与液体室171的水头之间的差,因此存储在液体室210中的墨通过连接在一起的供应管230和接头180移动到罐160的液体室171。
[0116]
如图5a和图5b中所示,在上壁204上形成有突起241。突起241从上壁204的外表面向上突出并且在前后方向8上延伸。突起241包括锁定表面242和倾斜表面243。锁定表面242和倾斜表面243位于上壁204的上方。锁定表面242在前后方向8上朝向前侧,并且分别在上下方向7上以及在左右方向9上延伸(也就是说,大致正交于上壁204)。倾斜表面243相对于上壁204倾斜,从而朝向上方和后方。
[0117]
锁定表面242是在盒200被安装在安装壳体150中的状态下与锁定销156形成接触的表面。倾斜表面243是在将盒200安装在安装壳体150上的过程中用于将锁定销156引导到锁定销与锁定表面242形成接触的位置的表面。在锁定表面242和锁定销156彼此接触的状态下,盒200克服螺旋弹簧186、223和233的推压力被保持在图6中所示的安装位置处。
[0118]
平板状构件被形成在锁定表面242的前方,以从上壁204向上延伸。平板状构件的上表面对应于当将盒200从安装壳体150中移出时由使用者操作的操作部244。当盒200被安装在安装壳体150中并且盖87位于打开位置处时,操作部244可以由用户操作。当操作部244被向下推动时,盒200旋转,并且因此锁定表面242从锁定销156向下移动。作为结果,可以将盒200从安装壳体150中移除。
[0119]
如图5a和图5b中所示,遮光肋245被形成在上壁204的外表面上并且在突起241的后方。遮光肋245从上壁204的外表面向上突出,并且在前后方向8上延伸。遮光肋245由遮挡从安装传感器32的光发射部输出的光的材料或颜色形成。在盒200被安装在安装壳体150中的状态下,遮光肋245位于从安装传感器32的光发射部延伸到光接收部的光学路径上。也就是说,当盒200被安装在安装壳体150中时,安装传感器32向控制器130(图1a和图1b)输出低电平信号。另一方面,当盒200未被安装在安装壳体150中时,安装传感器32向控制器130输出高电平信号。也就是说,控制器130可以根据从安装传感器32输出的信号来检测盒200是否被安装在安装壳体150中。
[0120]
如图5a和图5b中所示,ic芯片34位于上壁204的外表面上并且在前后方向8上在遮光肋245和突起241之间。在ic芯片34上,形成有电极248。另外,ic芯片34包括存储器(未示出)。电极248电连接到ic芯片34的存储器。电极248在ic芯片34的上表面上露出,从而能够与触点152电连接。也就是说,在盒200被安装在安装壳体150中的状态下,电极248被电连接到触点152。控制器130可以通过触点152和电极248从ic芯片34的存储器中读取信息,并且可以通过触点152和电极248将信息写入到ic芯片34的存储器。
[0121]
ic芯片34的存储器存储盒200的识别信息、序列号和盒剩余量值。识别信息是如下信息:该信息指示盒200是小容量盒还是大容量盒、所存储的墨的颜色等。序列号是用于识别盒200的个体的信息。盒剩余量值是指示存储在盒200中的墨量的值。未使用的盒200中的盒剩余量值作为指示初始剩余墨量的初始剩余量值被存储在存储器中。
[0122]
(控制器)
[0123]
打印机10包括控制器130。如图1a和图1b中所示,控制器130包括cpu35、存储部36
和通信总线39。存储部36包括rom37、eeprom61和ram62。控制器130是第一控制器的一个示例。
[0124]
rom37存储os(操作系统的缩写)程序37a、控制程序37b、通信程序37c等。控制程序37b是进行打印过程(将在下文描述)等的程序。通信程序37c是控制与诸如信息收集服务器40的外部设备的通信的程序。os程序37a是与控制程序37b不同的程序,并且进一步是控制与由通信程序37c所控制的操作不同的操作的程序。当由cpu35处理地址中所描述的命令时,执行os程序37a、控制程序37b和通信程序37c。在下文中,通过执行os程序37a、控制程序37b和通信程序37c而处理的操作在一些情况下可以被描述为控制器130的操作。控制器130可以具有使用ic的硬件电路,该ic实现由os程序37a、控制程序37b和通信程序37c执行的部分或全部操作。
[0125]
eeprom61存储打印机10的装置信息。装置信息包括打印机10的识别信息。打印机10的识别信息例如是打印机10的mac地址或序列号。
[0126]
此外,eeprom61存储第一排出值、第二排出值、初始盒剩余量值、初始罐剩余量值、s_empty标志、c_empty标志、紧急标志和传输完成标志。将在下文描述的打印过程中描述细节。
[0127]
通信总线39与头21、通信接口(下文中被称为通信i/f)31、安装传感器32、液位传感器33、触点152、时钟30、显示器28、马达(未示出)等连接。时钟30输出日期/时间信息。通信i/f31连接到通信线路6。通信i/f31是第一通信接口的一个示例。
[0128]
控制器130通过经由通信总线39驱动马达(未示出)来使进给辊23、输送辊25和排出辊27旋转。此外,控制器130通过通信总线39将驱动信号输出到头的驱动元件,从而使头21排出墨滴。
[0129]
控制器130通过安装传感器32检测盒200是否被安装在安装壳体150中。此外,控制器130通过液位传感器33检测存储在液体室171中的墨的液位是否等于或高于参考位置p。
[0130]
控制器130通过安装在安装壳体150中的盒200的电极248和触点152来读取存储在ic芯片34的存储器中的识别信息、序列号和盒剩余量值。此外,控制器130通过安装在安装壳体150中的盒200的电极248和触点152来更新存储在ic芯片34的存储器中的盒剩余量值。
[0131]
(信息收集服务器)
[0132]
信息收集服务器40可以由打印机10的卖方安装在通信线路6(诸如因特网)上,并且可以由与卖方不同的商业运营商来安装。信息收集服务器40包括cpu41、存储部42、用于打印机的通信接口43(下文中被称为通信i/f43)、用于发送服务器的通信接口44(下文中被称为通信i/f44)、时钟48和通信总线49。cpu41、存储部42和通信总线49构成控制器45。时钟48输出日期/时间信息。通信i/f43连接到通信线路6,并且与打印机10或发送服务器50通信。打印机10的控制器130和信息收集服务器40的控制器45是控制器系统的示例。信息收集服务器40的控制器45是第二控制器的示例。通信i/f44是第一通信i/f的示例。
[0133]
存储部42具有程序存储区46和数据存储区47。程序存储区46是硬盘等。数据存储区47是ram、硬盘等。
[0134]
程序存储区46存储程序,诸如os程序46a、控制程序46b和通信程序46c。控制程序46b执行一个过程(将在下文描述)。通信程序46c控制与打印机10或订购服务器50的通信。os程序46a是与控制程序46b不同的程序,并且进一步是执行与通信程序46c不同的控制的
程序。在下文中,当将命令从硬盘复制到ram时,执行os程序46a、控制程序46b和通信程序46c,cpu41顺序地执行复制到ram的命令。在下文中,在一些情况下,可以将通过执行os程序46a、控制程序46b和通信程序46c处理的操作描述为控制器45或信息收集服务器40的操作。
[0135]
(发送服务器)
[0136]
发送服务器50可以由打印机10的卖方安装在通信线路6(诸如因特网)上,并且可以由与卖方不同的商业运营商来安装。发送服务器50响应于来自信息收集服务器40的需求而提供将盒200发送给打印机10的用户的服务。
[0137]
发送服务器50包括cpu51、存储部52、通信接口53(下文中被称为通信i/f53)和通信总线54。cpu51、存储部52和通信总线54构成控制器55。通信i/f53与信息收集服务器40通信。cpu51、存储部52、通信i/f53和通信总线54具有与信息收集服务器40的cpu41、存储部42、通信i/f43和通信总线49相同的构造。
[0138]
(通过递送系统进行墨管理)
[0139]
在递送系统5中,信息收集服务器40从打印机10收集包括关于墨剩余量的信息的管理信息,并且当墨剩余量小时,信息收集服务器40针对发送服务器50订购盒200。如上所述,信息收集服务器40进行剩余墨量的管理和盒200的订购,从而节省了打印机10的用户用于管理剩余墨量和购买盒200的劳动。
[0140]
具体而言,打印机10的用户与进行盒200的剩余墨量的管理以及盒200的订购服务的制造商签订合约。盒200的剩余墨量的管理以及盒200的订购服务是与每一台打印机签订的服务。在签约时,作为签约对象的打印机10的用户信息或识别信息被登记在信息收集服务器40中。用户信息是目的地信息,诸如盒200的递送目的地的用户的姓名和地址。识别信息是用于将打印机10的个体识别为签约对象的信息,并且是打印机10的序列号、mac地址等。
[0141]
打印机10的识别信息和用户信息彼此关联,并且被登记在信息收集服务器40中。在下文中,将详细描述打印机10、信息收集服务器40和发送服务器50关于订购盒200的过程。
[0142]
(由打印机的控制器执行的过程)
[0143]
参照图7至图10中所示的流程图描述由打印机10的控制器130执行的过程。可以在本公开的范围内适当地改变以下过程的执行顺序。
[0144]
(打印过程)
[0145]
控制器130响应于输入到打印机10的打印指令而执行图7中所示的打印过程。该打印指令的获取目的地不受特别限制,但是例如,可以通过操作面板22或显示器28来接收与打印指令对应的用户的操作,或者可以通过通信i/f31从外部装置接收与打印指令对应的用户的操作。打印指令是排出指令的一个示例。打印指令包括指示图像的图像数据。图像数据被存储在打印机10的ram52中。
[0146]
首先,控制器130确定存储在eeprom61中的s_empty标志的值是“开(on)”还是“关(off)”(s11)。在存储在罐160的液体室171中的墨的液位到达墨从罐160流出所通过的流出口174的上端之前,控制器130将“开”存储在eeprom61的s_empty标志中。eeprom61的s_empty标志的值被存储为“关”,直到被存储为“开”为止。当墨的液位到达流出口174的上端时,存在空气进入头21的喷嘴的担心。当已经进入头21的喷嘴的空气保留在喷嘴中时,产生
了如下问题:防止墨进入喷嘴,或者防止从喷嘴排出墨滴。
[0147]
也就是说,s_empty标志旨在防止空气进入头21的喷嘴。在步骤s14(将在下文描述)中,控制器130将“关”存储在eeprom61的s_empty标志中,并且在步骤s65中,控制器130将“开”存储在eeprom61的s_empty标志中。尽管未在流程图中示出,但是当eeprom61的s_empty标志的值为“开”时,控制器130禁止通过头21排出墨。另外,当eeprom61的s_empty标志的值为“关”时,控制器130允许通过头21排出墨。
[0148]
当确定出eeprom61的s_empty标志的值为“开”(s11:开)时,控制器130以预定时间间隔从安装传感器32获得安装信号。接下来,控制器130确定所获得的安装信号是否从低电平信号(下文中被称为“l”)变为高电平信号(下文中被称为“h”)以及所获得的安装信号是否从“h”变为“l”(s12)。也就是说,通过安装信号的改变来确定盒200是否被安装。在下文中,通过确定所获得的安装信号是否从“l”变为“h”以及所获得的安装信号是否从“h”变为“l”,控制器130确定盒200是否被安装。另外,当控制器130确定出所获得的安装信号从“l”变为“h”以及所获得的安装信号从“h”变为“l”(s12:是)时,认为控制器130确定出盒200被安装。
[0149]
当控制器130确定出未安装盒200(s12:否)时,从安装传感器32定期地连续获取安装信号。当确定出盒200被安装(s12:是)时,控制器130执行第一更新过程(s13)。步骤s12的过程被例示为控制器130确定盒200是否被安装的具体示例,但是本公开不限于此。例如,可以通过使用序列号来确定盒200是否被安装。控制器130从盒200的ic芯片34的存储器读取盒200的序列号。然后,控制器130确定读出的序列号和存储在eeprom61中的序列号彼此是否一致。存储在eeprom61中的序列号指示在将新的盒200安装在安装壳体150中之前在安装在安装壳体150中的盒200的ic芯片34的存储器中存储的序列号。在该情况下,在控制器确定出盒200被安装的具体示例中,控制器130确定出从ic芯片34的存储器读出的序列号与存储在eeprom61中的序列号彼此不一致。
[0150]
(第一更新过程)
[0151]
图8a中所示的第一更新过程是控制器130更新存储在eeprom61中的初始盒剩余量值和初始罐剩余量值以及存储在盒200的ic芯片34中的盒剩余量值的过程。
[0152]
首先,控制器130通过触点152从安装在安装壳体150中的盒200的ic芯片34的存储器中读取存储在ic芯片34的存储器中的盒剩余量值(s31)。控制器130将读出的盒剩余量值作为初始盒剩余量值存储在eeprom61中(s32)。
[0153]
控制器130从ram62读取罐剩余量值(s33)。当由于断电等原因未将罐剩余量值存储在ram62中时,类似于第四更新过程(将在下文描述),控制器130计算罐剩余量值并将计算出的罐剩余量值存储在ram62中。从ram62读出的罐剩余量值是指示恰好在盒200被安装之前存储在罐160的液体室171中的剩余墨量的值。换句话说,罐剩余量值是指示当拉动盒200时存储在罐160的液体室171中的剩余墨量的值。控制器130将从ram62读出的罐剩余量值作为初始罐剩余量值存储在eeprom61中(s33)。
[0154]
控制器130将初始盒剩余量值和初始罐剩余量值相加,并且计算指示墨的总剩余量的总剩余量值(s34)。控制器130根据计算出的总剩余量值来确定新的盒剩余量值和新的罐剩余量值(s35)。
[0155]
具体地,当将新的盒200安装在安装壳体150中时,存储在液体室210中的墨部分地
从盒200的液体室210流出到罐160的液体室171。当存储在盒200的液体室210中的墨的水头与存储在罐160的液体室171中的墨的水头之间几乎没有差异时,从盒200的液体室210到罐160的液体室171的墨流出停止。新的盒剩余量值和新的罐剩余量值指示在存储在盒200的液体室210中的墨的水头与存储在罐160的液体室171中的墨的水头之间几乎没有差异的状态下的剩余墨量。
[0156]
例如,可以基于存储在eeprom61或rom37中的公式,通过控制器130的计算来确定盒剩余量值和罐剩余量值。或者,例如,可以基于存储在eeprom61或rom37中的表,通过控制器130来确定盒剩余量值和罐剩余量值。具体地,通过设计来预定盒200的液体室210的形状和罐160的液体室171的形状。因此,在存储在盒200中的墨的水头与存储在罐160中的墨的水头之间几乎没有差异的状态下,当确定出墨的总剩余量值时,也确定出盒剩余量值和罐剩余量值。eeprom61或rom37预先存储用于根据总剩余量值来计算盒剩余量值和罐剩余量值的公式。或者,eeprom61或rom37预先存储指示总剩余量值、盒剩余量值和罐剩余量值之间的相关性的表。控制器130基于墨的总剩余量值和公式或表来确定新的盒剩余量值和新的罐剩余量值。
[0157]
控制器130将已确定的新的盒剩余量值存储在ram62中,并且更新存储在ic芯片34的存储器中的盒剩余量值(s36)。另外,控制器130将已确定的新的罐剩余量值存储在ram62中(s37)。接下来,控制器130将从时钟30输出的日期/时间信息作为安装日期/时间存储在eeprom61中(s38),并且结束第一更新过程。
[0158]
如图7中所示,当第一更新过程结束(s13)时,控制器130将“关”存储在eeprom61的s_empty标志中、将“关”存储在eeprom51的c_empty标志中、将“开”存储在eeprom61的盒安装标志中、将零存储为eeprom61的第一排出值和第二排出值、将“关”存储在eeprom61的紧急标志中并且将“关”存储在eeprom61的传输完成标志中(s14)。在执行步骤s14的过程之后,控制器130再次执行步骤s11的过程。下面将描述c_empty标志、第一排出值、第二排出值、紧急标志和传输完成标志。
[0159]
当确定出eeprom61的s_empty标志的值为“关”(s11:关)时,控制器130从液位传感器33获得信号(下文中被称为液位信号)(s15)。此后,控制器130根据存储在ram62中的图像数据在片材上执行打印(s16)。当将图像打印在片材上时,通过头21排出墨。当排出墨时,罐160中的墨的液位降低。在执行打印(s16)之后,控制器130从液位传感器33获得液位信号(s17)。接下来,控制器130确定在步骤s15中获得的液位信号和在步骤s17中获得的液位信号(s18)。在下文中,在控制器130中,可以将从液位传感器33获得的低电平信号描述为“l”。另外,在控制器130中,可以将从液位传感器33获得的高电平信号描述为“h”。
[0160]
当确定出在步骤s15和s17中获得的所有液位信号均为“l”(s18:l
→
l)时,控制器130执行第二更新过程(s19)。在步骤s18中,当控制器130确定出在步骤s15和s17中获得的液位信号为“l”时,存储在罐160的液体室171中的墨处于以下状态。也就是说,在执行打印(s16)之前存储在罐160的液体室171中的墨的液位的位置等于或高于参考位置p(在步骤s15中获得的液位信号是“l”)。此外,在执行打印(s16)之后存储在罐160的液体室171中的墨的液位的位置等于或高于参考位置p(在步骤s17中获得的液位信号是“l”)。也就是说,在执行打印(s16)之后,当控制器130在步骤s17中获得的液位信号为“l”时,墨存在于盒200的液体室210中。
[0161]
(第二更新过程)
[0162]
图8b中所示的第二更新过程是控制器130根据第一排出值来确定新的盒剩余量值和新的罐剩余量值的过程,该第一排出值指示在打印或维修时通过头21排出的墨量。例如,第一排出值是通过将排出到头21的一滴墨的量乘以排出的一滴墨的数目而获得的值。控制器130命令头21排出墨,以对与该指令对应的第一排出值进行计数。控制器130对与自安装了盒200起直到当前时间为止头21所排出的墨量对应的第一排出值进行计数。也就是说,第一排出值是自安装了盒200起直到当前时间为止头21所排出的墨量的累积值。第一排出值被存储在eeprom61中。第一排出值是排出量的示例。
[0163]
首先,控制器130从eeprom61读取初始盒剩余量值和初始罐剩余量值(s41)。接下来,控制器130通过将读出的初始盒剩余量值和读出的初始罐剩余量值相加来计算总剩余量值(s42)。控制器130通过从计算出的总剩余量值减去第一排出值来计算新的总剩余量值(s43)。此后,类似于以上描述,控制器130通过使用公式或表来确定新的盒剩余量值和新的罐剩余量值(s44)。
[0164]
控制器130将已确定的新的盒剩余量值存储在ram62中,并且更新存储在ic芯片34的存储器中的盒剩余量值(s45)。另外,控制器130将已确定的新的罐剩余量值存储在ram62中(s46),并且结束第二更新过程。
[0165]
如图7中所示,当第二更新过程(s19)结束时,控制器130确定下一页上的图像数据是否被存储在ram62中(s23)。当确定出下一页上的图像数据被存储在ram62中(s23:是)时,控制器130再次执行步骤s11的过程。当确定出下一页上的图像数据未被存储在ram62中(s23:否)时,控制器130结束打印过程。
[0166]
盒剩余量值和罐剩余量值的上述确定方法仅是一个示例。盒剩余量值和罐剩余量值可以通过另一种方法来确定。
[0167]
当确定出eeprom61的s_empty标志的值为“关”(s11:关)时,控制器130再次执行步骤s15至s18的过程。当确定出在步骤s15中获得的液位信号为“l”并且在步骤s17中获得的液位信号为“h”(s18:l
→
h)时,控制器130执行第三更新过程(s20)。在步骤s18中,当控制器130确定出在步骤s15中获得的液位信号为“l”并且在步骤s17中获得的液位信号为“h”时,存储在罐160的液体室171中的墨处于以下状态。也就是说,在执行打印(s16)之前存储在罐160的液体室171中的墨的液位的位置等于或高于参考位置p(在步骤s15中获得的液位信号为“l”)。此外,在执行打印(s16)之后存储在罐160的液体室171中的墨的液位的位置低于参考位置p(在步骤s17中获得的液位信号为“h”)。也就是说,这意味着曾经在执行打印(s16)期间在盒200的液体室210中的墨不再存在。换句话说,这意味着存储在盒200的液体室210中的墨在执行打印(s16)期间用完。
[0168]
(第三更新过程)
[0169]
图8c中所示的第三更新过程是控制器130将初始盒剩余量值更新为第一预定值并且将初始罐剩余量值更新为第二预定值的过程。具体地,第一排出值指示通过头21排出以用于打印等的墨量,该第一排出值包括误差。例如,尽管控制器130命令头21排出指定量的墨,但是在一些情况下,实际从头21排出的墨量与命令给头21的指定量不同。例如,该差异可能是由于命令排出墨时的温度造成的。由于随着温度的降低,墨的粘度增加,并且墨难以通过喷嘴29排出。此外,当控制器130向头21重复发出上述指令时,实际通过头21重复排出
的墨量与指定量的重复量之间的差异可能变得更大。也就是说,有可能每次打印时都将由计算出的第一排出值指示的量和实际通过头21排出的量中的误差累积。
[0170]
由于基于第一排出值来确定盒剩余量值,因此在由盒剩余量值指示的剩余墨量和存储在液体室210中的实际剩余墨量之间会发生误差。此外,由于基于第一排出值来确定罐剩余量值,因此在由罐剩余量值指示的剩余墨量和存储在液体室171中的实际剩余墨量之间会发生误差。因此,每次打印时确定的盒剩余量值和罐剩余量值包括累积误差。第三更新过程是重置累积误差的过程。
[0171]
具体地,控制器130将存储在ic芯片34的存储器中的初始盒剩余量值更新为第一预定值(s51)。例如,第一预定值是“零”。另外,控制器130将初始罐剩余量值作为第二预定值存储在ram62和eeprom61中(s52)。第二预定值是指示当墨的液位在参考位置p处时存储在罐160的液体室171中的墨量的值。例如,第一预定值和第二预定值被预先存储在rom37中。
[0172]
接下来,控制器130将“开”存储在eeprom61的c_empty标志中(s53)。随后,控制器130获得从时钟30输出的日期/时间信息作为盒空日期/时间(s54)。然后,控制器130计算从步骤s38中存储在eeprom61中的安装日期/时间到步骤s54中获得的盒空日期/时间的经过时间(s55)。盒空指示存储在盒200的液体室210中的墨已经用完。
[0173]
控制器130确定计算出的经过时间是否小于存储在rom37或eeprom61中的第一时间(s56)。当确定出计算出的经过时间小于第一时间(s56:是)时,控制器130将“开”存储在eeprom61的紧急标志中,并且结束第三更新过程。另一方面,当确定出计算出的经过时间等于或大于第一时间(s56:否)时,控制器130跳过步骤s57的过程并且结束第三更新过程。也就是说,当计算出的经过时间等于或大于第一时间时,eeprom61的紧急标志保留步骤s14中所存储的“关”。
[0174]
第一时间是阈值,并且控制器130基于该阈值来确定存储在盒200的液体室210中的墨的排出速率是否快。具体而言,经过时间(该经过时间是从盒200被安装在安装壳体150中起直到盒200的液体室201中所存储的墨用完为止的时间)短的事实意味着存储在盒200的液体室201中的墨的排出速率快。取决于经过时间是否小于第一时间,控制器确定存储在盒200的液体室201中的墨的排出速率是否块。也就是说,当存储在盒200的液体室201中的墨的排出速率快时,eeprom61的紧急标志存储“开”。另一方面,当存储在盒200的液体室201中的墨的排出速率不快时,eeprom61的紧急标志存储“关”。
[0175]
如图7中所示,当第三更新过程(s20)结束时,控制器130通知盒空状态,在该盒空状态下,存储在盒200的液体室210中的墨用完(s22)。具体地,控制器130在显示器28上显示指示盒200的液体室210中所存储的墨用完或更换盒200的盒空图像。例如,执行盒空状态的通知直到在步骤s14中将“关”存储在eeprom61的c_empty标志中为止。也就是说,由于存储在盒200的液体室210中的墨用完,因此在显示器28上显示盒空图像,直到安装了新的盒200为止。
[0176]
显示器28是通知装置(也可以被称为警报器)的示例。代替显示器28或者除了显示器28之外,打印机10可以包括扬声器。在这种情况下,在步骤s22中,控制器130使扬声器输出警报声音。扬声器是通知装置(也可以被称为警报器)的示例。代替显示器28或者除了显示器28之外,打印机10可以包括诸如led的灯。在这种情况下,在步骤s22中,控制器130使诸
如led的灯闪烁或点亮。灯是通知装置(也可以被称为警报器)的示例。
[0177]
在执行步骤s22的过程之后,控制器130确定下一页上的图像数据是否被存储在ram62中(s23)。当确定出下一页上的图像数据被存储在ram62中(s23:是)时,控制器130再次执行步骤s11的过程。当确定出下一页上的图像数据未被存储在ram62中(s23:否)时,控制器130结束打印过程。
[0178]
当在步骤s11的过程中确定出eeprom61的s_empty标志的值为“关”(s11:关)时,控制器130再次执行步骤s15至s18的过程。当确定出在步骤s15和s17中获得的所有液位信号均为“h”(s18:h
→
h)时,控制器130执行第四更新过程(s21)。在步骤s18中,当控制器130确定出在步骤s15和s17中获得的所有液位信号均为“h”时,存储在罐160的液体室171中的墨处于以下状态。也就是说,在执行打印(s16)之前,存储在罐160的液体室171中的墨的液面的位置低于参考位置p(在步骤s15中获得的液位信号为“h”)。此外,在执行打印(s16)之后,存储在罐160的液体室171中的墨的液面的位置低于参考位置p(在步骤s17中获得的液位信号为“h”)。也就是说,紧接在执行打印(s16)之后,盒200的液体室210中不存在墨。
[0179]
(第四更新过程)
[0180]
图8d中所示的第四更新过程是控制器130计算罐剩余量值并且确定是否禁止打印的过程。首先,控制器130从eeprom61读取被更新为第二预定值的初始罐剩余量值(s61)。控制器130从读出的初始罐剩余量值中减去第二排出值,以计算新的罐剩余量值(s62)。例如,类似于第一排出值,第二排出值是通过将排出到头21的一滴墨的量乘以排出的一滴墨的数目而获得的值。控制器130命令头21排出墨,以对与该指令对应的第二排出值进行计数。在从液位传感器33获得的液位信号从“l”变为“h”之后,控制器130对第二排出值进行计数,该第二排出值指示直到当前时间为止通过头21排出的墨量。也就是说,第二排出值是自从液位传感器33获得的液位信号从“l”变为“h”起直到当前时间为止头21所排出的墨量的累积值。第二排出值被存储在eeprom61中。
[0181]
控制器130将计算出的新的罐剩余量值存储在ram62中(s63)。接下来,控制器130确定已计数的第二排出值是否达到阈值(s64)。阈值是预先存储在rom37或eeprom61中的值。当确定出已计数的第二排出值未达到阈值(s64:是)时,控制器130结束第四更新过程。另一方面,当确定出已计数的第二排出值达到阈值(s64:否)时,控制器130将“开”存储在eeprom61的s_empty标志中(s65),并且结束第四更新过程。尽管未示出流程图,但是当确定出“开”被存储在eeprom61的s_empty标志中时,控制器130禁止通过头21排出墨(包括打印和维护)。
[0182]
阈值是如下值,该值使得当第二排出值达到该阈值时,存储在罐160的液体室171中的墨的液位位于流出口174的稍上方。具体地,在一些情况下,在液位传感器33被设计成检测的参考位置p与液位传感器33实际检测到的参考位置p之间会发生误差。例如,由于致动器190的操作错误而发生误差。阈值是如下值,该值使得即使误差是在设计时可以假定的最大误差,但第二排出值达到该阈值时,存储在罐160的液体室171中的墨的液位也不与流出口174重叠。控制器130禁止通过头21排出墨,以防止空气进入头21。除了上述误差之外,考虑到打印机10被放置在倾斜表面上,阈值可以是如下值,该值使得即使打印机10被放置在具有预定倾斜角的表面上,但当第二排出值达到阈值时,存储在罐160的液体室171中的墨的液位也不与流出口174重叠。另外,在一些情况下,第二排出值可以包括与第一排出值
类似的误差。阈值可以是如下值,该值使得即使第二排出值中的误差是最大误差,但当第二排出值达到阈值时,存储在罐160的液体室171中的墨的液位也不与流出口174重叠。
[0183]
如图7中所示,当第四更新过程(s21)结束时,控制器130确定下一页是否被存储在ram62中(s23)。当确定出下一页被存储在ram62中(s23:是)时,控制器130再次执行步骤s11的过程。当确定出下一页未被存储在ram62中(s23:否)时,控制器130结束打印过程。
[0184]
如上所述,每当执行步骤s16的打印时,控制器130就基于用于打印的墨量来确定盒剩余量值和罐剩余量值。在以上描述中,已经描述了每当控制器130执行一页的打印时就确定盒剩余量值和罐剩余量值的示例。然而,代替该方法,控制器130可以在每次执行打印的一次通过时确定盒剩余量值和罐剩余量值。另外,在通过头21排出墨以用于维护时以及在打印时,控制器130执行第二更新过程、第三更新过程和第四更新过程。维护的执行指令是排出指令的一个示例。
[0185]
(联系信息传输过程)
[0186]
打印机10的控制器130周期性地执行图9中所示的联系信息传输过程。具体地,当从时钟30输出的日期/时间信息变为存储在rom37或eeprom61中的预定时间时,控制器130执行联系信息传输过程。预定时间是诸如五分钟、十分钟或一小时的时间。控制器130每隔预定时间执行联系信息传输过程。控制器130可以以预定时间间隔执行联系信息传输过程。例如,当由时钟30测量的时间达到预定时间(例如,五分钟、十分钟或一小时)时,控制器130执行联系信息传输过程。
[0187]
联系信息传输过程是打印机10将联系信息传输到信息收集服务器40的过程。联系信息是用于确定信息收集服务器40是否将指示订购盒200的订购信息传输到发送服务器50的信息。参照图9,将描述联系信息传输过程的细节。
[0188]
首先,控制器130确定eeprom61的传输完成标志的值是否为“关”(s100)。当确定出eeprom61的传输完成标志的值不是“关”即为“开”(s100:否)时,控制器130结束联系信息传输过程。当确定出eeprom61的传输完成标志的值为“关”(s100:是)时,控制器130从液位传感器33获得液位信号,并且确定所获得的液位信号是否为“h”。(s101)。
[0189]
在步骤s101中,确定:在执行当前的联系信息传输过程之前,存储在盒200的液体室210中的墨是否被完全用完。当确定出所获得的液位信号不是“h”(s101:否)时,控制器130结束联系信息传输过程。
[0190]
另一方面,当确定出所获得的液位信号为“h”(s101:是)时,控制器130执行步骤s102中所示的过程。在步骤s102中,控制器130确定存储在eeprom61中的紧急标志是否为“开”(s102)。当存储在eeprom61中的紧急标志的值是“开”时,从安装了盒200起直到存储在液体室171中的墨的液位到达参考位置p为止的经过时间相对短。也就是说,当存储在eeprom61中的紧急标志的值是“开”时,存储在盒200的液体室210中的墨的排出速率快。
[0191]
当确定出存储在eeprom61中的紧急标志的值是“开”(s102:是)时,控制器130生成包括紧急信息的联系信息(s103)。具体地,控制器130从盒200的ic芯片34的存储器读取盒200的类型信息,并且进一步从eeprom61读取打印机10的装置信息和紧急信息。控制器130生成包括读出的类型信息、装置信息和紧急信息的联系信息。控制器130可以将从盒200的ic芯片34的存储器读出的类型信息存储在eeprom61中,并且从eeprom61读取类型信息,读出的类型信息被包括在联系信息中。
[0192]
盒200的类型信息例如是指示盒200是小容量盒还是大容量盒的信息或者是指示所存储的墨的颜色的信息。打印机10的装置信息包括打印机10的识别信息,例如,打印机10的mac地址或序列号。打印机10的识别信息被存储在eeprom61中。
[0193]
紧急信息是指示存储在盒200的液体室210中的墨的排出速率快的信息。紧急信息可以是存储在eeprom61中的紧急标志的值(开)。
[0194]
另一方面,当确定出紧急标志为“关”(s102:否)时,控制器130确定从时钟30输出的日期/时间信息是否对应于存储在eeprom61中的预定传输时间(s104)。预定传输时间是每天的指定时间,例如0点或12点。
[0195]
当确定出从时钟30输出的日期/时间信息与预定传输时间不对应(s104:否)时,控制器130结束联系信息传输过程。另一方面,当确定出从时钟30输出的日期/时间信息对应于预定传输时间(s104:是)时,控制器130生成不包括紧急信息的联系信息(s105)。
[0196]
当生成联系信息(s103、s105)时,控制器130通过通信i/f31将联系信息传输到信息收集服务器40(s106),将“开”存储在eeprom61的传输完成标志中,并且结束联系信息传输过程。从打印机10传输的联系信息由信息收集服务器40接收。
[0197]
(订购信息传输过程)
[0198]
将参照图10a描述由已经接收到联系信息的信息收集服务器40的控制器45执行的订购信息传输过程的细节。信息收集服务器的控制器45周期性地执行图10a中所示的联系信息传输过程。具体地,当从时钟48输出的日期/时间信息达到存储在存储部42中的预定时间时,控制器45执行订购信息传输过程。例如,预定时间是诸如五分钟、十分钟或一小时的时间。控制器45以预定时间间隔执行订购信息传输过程。控制器45可以以预定时间间隔执行订购信息传输过程。例如,当由时钟48测量出的时间达到预定时间(例如,五分钟、十分钟或一小时)时,控制器45执行订购信息传输过程。控制器45可以在包括打印机10传输联系信息的时间的时间段中执行订购信息传输过程。
[0199]
首先,信息收集服务器40的控制器45确定是否通过通信i/f43接收到联系信息(s401)。当确定出未接收到联系信息(s401:否)时,控制器45结束订购信息传输过程。另一方面,当确定出通过通信i/f43接收到联系信息(s401:是)时,控制器45生成订购信息(s402)。
[0200]
订购信息包括例如被包括在联系信息中的盒200的类型信息和包括收件人和盒200被递送到的地址的用户信息。控制器45从存储部42读取被包括在联系信息中的与打印机10的识别信息对应的用户信息,并且将该用户信息包括在订购信息中。
[0201]
尽管未示出,但是控制器45确定接收到的联系信息是否包括紧急信息或者联系信息中是否包括具有“开”的值的紧急标志。当确定出接收到的联系信息包括紧急信息或者联系信息中包括具有“开”的值的紧急标志时,控制器45将指定信息包括在订购信息中。指定信息是指示诸如特快递送(其具有比普通递送少的递送天数)的递送的信息。订购信息是第一信息的示例。指定信息是第二信息的示例。另一方面,当确定出以下情况时,控制器45在订购信息中不包括指定信息:接收到的联系信息不包括紧急信息;或者联系信息中不包括具有“开”的值的紧急标志。
[0202]
指定信息可以始终被包括在订购信息中。在这种情况下,当确定出接收到的联系信息包括紧急信息或者联系信息中包括具有“开”的值的紧急标志时,控制器45包括指定信
息,该指定信息指示诸如特快递送的递送,其具有比普通递送少的递送天数。另一方面,当确定出接收到的联系信息不包括紧急信息或者联系信息中不包括具有“开”的值的紧急标志时,控制器45将指示普通递送的指定信息包括在订购信息中。
[0203]
当生成订购信息(s402)时,控制器45将所生成的订购信息存储在存储部42中,并且通过通信i/f44将其传输到发送服务器50(s403)。从信息收集服务器40传输的订购信息由发送服务器50通过通信i/f53接收。
[0204]
(发送信息生成过程)
[0205]
参照图10b,将描述由用于接收订购信息的发送服务器50的控制器55执行的发送信息生成过程。发送服务器50的控制器55周期性地执行订购信息生成过程。控制器55可以在包括信息收集服务器40传输联系信息的时间的时间段中执行订购信息生成过程。发送服务器50的控制器55确定是否通过通信i/f53接收到订购信息(s501)。当确定出未接收到订购信息时,控制器55结束发送信息生成过程(s501:否)。另一方面,当确定出已经接收到订购信息(s501:是)时,控制器55生成发送信息(s502)并且结束发送信息生成过程。
[0206]
发送信息是如下信息,该信息指示将盒200(该盒200由被包括在订购信息中的类型信息所指示)发送到收件人和地址,该收件人和地址由被包括在订购信息中的用户信息所指示。当接收到的订购信息包括指定信息时,控制器55生成发送信息,使得将盒200以由指定信息指定的递送类型(特快递送或普通递送)进行发送。所生成的发送信息用于盒200的发送操作。
[0207]
在该说明性实施例中,液位传感器33检测存储在盒200中的墨用完。据此,与使用第一排出值来检测盒200中所存储的墨用完的情况相比,准确地检测盒200中所存储的墨的耗尽。基于液位传感器33的检测,所发送的订购信息由发送服务器50接收。作为结果,很大可能的是,在存储在盒200中的墨用完之后,新的盒200到达用户。因此,将残留有墨的盒200替换为新的盒200,并且可以减少墨的无用浪费。
[0208]
在该说明性实施例中,设有罐160,墨从盒200的液体室210的内部流入该罐160中。因此,即使当存储在盒200的液体室210中的墨用完时,也可以通过存储在罐160的液体室171中的墨继续进行打印。
[0209]
在该说明性实施例中,控制器130计算从盒200被安装在安装壳体150中起直到存储在盒200的液体室210中的墨用完为止的经过时间。控制器130根据计算出的经过时间来确定存储在盒200的液体室210中的墨的排出速率是否快。当确定出排出速率快时,控制器130传输紧急信息,该紧急信息指示该事实或具有值“开”的紧急标志,同时将其包括在订购信息中。因此,很大可能的是,在存储在罐160的液体室171中的墨用完之前,新盒200到达用户。作为结果,能够减少在新盒200到达用户之前存储在罐160的液体室171中的墨就被用完并且不能继续打印的担心。如上所述,存储在罐160的液体室171中的墨被用完的事实意味着存储在液体室171中的墨的液位位于流出口174的稍上方。
[0210]
在该说明性实施例中,由于指示递送速度的指定信息被包括在订购信息中,因此能够进一步减少在新盒200到达用户之前存储在罐160的液体室171中的墨就被用完并且不能继续打印的担心。
[0211]
《第二说明性实施例》
[0212]
在上述第一说明性实施例中,已经给出了关于如下示例的描述,在该示例中,当控
制器130在安装了盒200之后不传输联系信息(图9中的s100:“是”)并且确定出所获得的液位信号为“h”(图9中的s101:“是”)时,控制器130将联系信息传输到信息收集服务器40。也就是说,描述了打印机10基于从液位传感器33输出的液位信号来传输联系信息的示例。在第二说明性实施例中,将描述如下示例,在该示例中,当在第五更新过程(图11b1和图11b2)中计算出的新的总剩余量值变得小于第一预定剩余量值时,将联系信息从打印机10传输到信息收集服务器40。也就是说,在第二说明性实施例中,打印机10可以不包括液位传感器33。
[0213]
第二说明性实施例与第一说明性实施例的不同之处在于,打印机10的控制器130执行图11a中所示的打印过程来代替图7中所示的打印过程并且执行图12中所示的联系信息传输过程来代替图9中所示的联系信息传输过程。以下描述的过程之外的其它过程与第一说明性实施例中所描述的那些过程相同。在图11a至图11b2和图12中所示的过程中,与第一说明性实施例的过程相同的过程由相同的附图标记表示,并且将不再给出其描述。
[0214]
根据第二说明性实施例的打印机100的控制器130执行图11a中所示的打印过程。如第一说明性实施例中的那样,控制器130执行步骤s11至s14的过程和步骤s16的过程。在步骤s11中,当确定出eeprom61的s_empty标志的值是“关”(s11:关)时,控制器130在执行了步骤s16的过程之后执行第五更新过程(s24)。
[0215]
将参照图11b1和图11b2描述第五更新过程。类似于第一说明性实施例中所描述的第二更新过程(图8b),控制器130执行步骤s41至s46的过程。在执行步骤s46之后,控制器130确定在步骤s43中计算出的新的总剩余量值是否小于第二预定剩余量值(s71)。第二预定剩余量值是当存储在罐160的液体室171中的墨用完时的剩余墨量的理论值,并且被预先存储在rom37或eeprom61中。
[0216]
当确定出在步骤s43中计算出的新的总剩余量值小于第二预定剩余量值(s71:是)时,控制器130将“开”存储在eeprom61的s_empty标志中(s72)并且结束第五更新过程。另一方面,当确定出在步骤s43中计算出的新的总剩余量值不小于第二预定剩余量值(s71:否)时,控制器130确定在步骤s43中计算出的新的总剩余量值是否小于第一预定剩余量值(s73)。
[0217]
第一预定剩余量值是当存储在盒200的液体室210中的墨用完时存储在罐160的液体室171中的墨的剩余量的理论值。第一预定剩余量值被预先存储在rom37或eeprom61中。在步骤s43中计算出的新的总剩余量值是至少包括第二液体室中的液体量的剩余量的示例。第一预定剩余量值是预定量的示例。
[0218]
代替确定在步骤s43中计算出的新的总剩余量值是否小于第一预定剩余量值,控制器130可以确定第一排出值是否等于或大于预定值。该预定值例如是通过从总剩余量值减去第一预定剩余量值而获得的值,该总剩余量值是初始盒剩余量值与初始罐剩余量值的总和。由于新的总剩余量值是使用第一排出值计算出的值,因此关于总剩余量值是否小于第一预定值的确定与关于第一排出值是否等于或大于预定值的确定是同义的。总剩余量值是否小于第一预定剩余量值的确定的另一个确定等同物被包括在总剩余量值是否小于第一预定剩余量值的确定中。
[0219]
当确定出在步骤s43中计算出的新的总剩余量值不小于第一预定剩余量值(s73:否)时,控制器130结束第五更新过程。另一方面,当确定出在步骤s43中计算出的新的总剩
余量值小于第一预定剩余量值(s73:是)时,控制器130将“开”存储在eeprom61的c_empty标志中(s74)。接下来,如在第一说明性实施例中一样,控制器130执行步骤s54至s57的过程。此后,响应于步骤s57的过程的执行,控制器130结束第五更新过程。
[0220]
第二说明性实施例的打印机10执行图12中所示的过程。具体地,当从时钟30输出的日期/时间信息变为存储在rom37或eeprom61中的预定时间时,控制器130执行图12中所示的联系信息传输过程。例如,预定时间是诸如五分钟、十分钟或一小时的时间。控制器130以预定时间间隔执行联系信息传输过程。控制器130可以以预定时间间隔执行联系信息传输过程。例如,当由时钟30测量出的时间达到预定时间(诸如五分钟、十分钟或一小时)时,控制器130执行联系信息传输过程。
[0221]
联系信息传输过程是打印机10将联系信息传输到信息收集服务器40的过程。该联系信息与第一说明性实施例中的相同。将参照图12描述根据第二说明性实施例的联系信息传输过程的细节。与在第一说明性实施例中所描述的联系信息传输过程(图9)相同的过程由相同的附图标记表示,并且将不再给出其描述。
[0222]
首先,打印机10的控制器130确定eeprom61的传输完成标志的值是否为“关”(s100)。当确定出eeprom61的传输完成标志的值不是“关”即为“开”(s100:否)时,控制器130结束联系信息传输过程。当确定出eeprom61的传输完成标志的值为“关”(s100:是)时,控制器130确定在第五更新过程的步骤s43中计算出的新的总剩余量值是否小于第一预定剩余量值(s111)。
[0223]
当确定出在步骤s43中计算出的新的总剩余量值不小于第一预定剩余量值(s111:否)时,控制器130结束联系信息传输过程。另一方面,当确定出在步骤s43中计算出的新的总剩余量值小于第一预定剩余量值(s111:是)时,控制器130如在第一说明性实施例中的那样执行从步骤s102到步骤s106的过程,并且将联系信息传输到信息收集服务器40。
[0224]
从打印机10传输的联系信息由信息收集服务器40接收。在接收到联系信息时,信息收集服务器40执行如在第一说明性实施例中那样的订购信息传输过程(图10a)。另外,已经通过图10a中所示的订购信息传输过程通过通信i/f53接收到从信息收集服务器40传输的订购信息的发送服务器50执行如在第一说明性实施例中那样的发送信息生成过程(图10b)。
[0225]
在该第二说明性实施例中,通过基于第一排出值而不是基于液位传感器33计算出的总剩余量值来确定存储在盒200的液体室210中的墨是否用完。
[0226]
在该第二说明性实施例中,由于设有罐160(墨从盒200的液体室210的内部流入到该罐160中),因此即使当存储在盒200的液体室210中的墨用完时,也可以用存储在罐160的液体室171中的墨继续进行打印。
[0227]
在该第二说明性实施例中,控制器130计算从盒200被安装在安装壳体150中起直到假定存储在盒200的液体室210中的墨用完为止的经过时间(盒空日期和时间)。控制器130根据计算出的经过时间来确定存储在盒200的液体室210中的墨的排出速率是否快。当确定出排出速率快时,控制器130传输紧急信息,该紧急信息指示该事实或者具有值“开”的紧急标志,同时将其包括在订购信息中。因此,很大可能的是,在存储在罐160的液体室171中的墨用完之前,新盒200到达用户。作为结果,可以减少在新盒200到达用户之前存储在罐160的液体室171中的墨就被用完并且不能继续打印的担心。
[0228]
在该第二说明性实施例中,由于指示递送速度的指定信息被包括在订购信息中,因此可以进一步减少在新盒200到达用户之前存储在罐160的液体室171中的墨就被用完并且不能继续打印的担心。
[0229]
《第一变型》
[0230]
在上述第一说明性实施例中,已经给出了关于如下示例的描述,在该示例中,当控制器130在安装了盒200之后不传输联系信息(图9中的s100:“是”)并且确定出所获得的液位信号为“h”(图9中的s101:“是”)时,控制器130传输联系信息。在第一说明性实施例中,将描述如下示例,在该示例中,在确定出所获得的液位信号为“h”时,控制器130基于通过头21排出的墨的排出量来传输联系信息。
[0231]
在第一变型中,打印机10执行图13中所示的联系信息传输过程来代替图9中所示的联系信息传输过程。图13中所示的过程以外的其它过程与第一说明性实施例中所描述的那些过程相同。
[0232]
在第一变型中,打印机10执行图13中所示的联系信息传输过程。具体地,当从时钟30输出的日期/时间信息变为存储在rom37或eeprom61中的预定时间时,控制器130执行图13中所示的联系信息传输过程。例如,预定时间是诸如五分钟、十分钟或一小时的时间。控制器130以预定时间间隔执行联系信息传输过程。控制器130可以以预定时间间隔执行联系信息传输过程。例如,当由时钟30测量出的时间达到预定时间(诸如五分钟、十分钟或一小时)时,控制器130执行联系信息传输过程。
[0233]
联系信息传输过程是打印机10将联系信息传输到信息收集服务器40的过程。该联系信息与第一说明性实施例中的相同。将参照图13描述联系信息传输过程的细节。与第一说明性实施例中所描述的联系信息传输过程(图9)相同的过程由与第一说明性实施例中的附图标记相同的附图标记表示,并且将不再给出其描述。
[0234]
首先,打印机10的控制器130确定eeprom61的传输完成标志的值是否为“关”(s100)。当确定出eeprom61的传输完成标志的值不是“关”即为“开”(s100:否)时,控制器130结束联系信息传输过程。当确定出eeprom61的传输完成标志的值为“关”(s100:是)时,控制器130如在第一说明性实施例中的那样执行步骤s101的过程。当确定出所获得的液位信号不是“h”(s101:否)时,控制器130结束联系信息传输过程。
[0235]
另一方面,当确定出所获得的液体信号为“h”(s101:是)时,控制器130执行步骤s121的过程。步骤s121的过程是确定第二排出值是否小于预定排出值的过程。第二排出值是在从液位传感器33输出的液位信号从“l”变为“h”之后通过头21排出的墨量的值。
[0236]
代替确定第二排出值是否小于预定排出值,控制器130可以确定在第四更新过程(图8d)中计算出的罐剩余量值是否等于或大于阈值。由于罐剩余量值是使用第二排出值计算出的值,因此关于罐剩余量值是否等于或大于阈值的确定与关于第二排出值是否相等或大于预定值的确定是同义的。第二排出值是否小于预定排出值的确定的另一个确定等同方案被包括在第二排出值是否小于预定排出值的确定中。
[0237]
例如根据由液位传感器33检测到的墨的液位来设定预定排出值,并且将该预定排出值预先存储在rom37或eeprom61中。例如,当由液位传感器33检测到的墨的液位位于参考位置p上方时,在存储在盒200的液体室201中的墨用完之前,即,在预定量的墨残留在盒200中的状态下,由液位传感器33检测墨的液位。预定排出值被设定成与该预定量对应的值。
[0238]
当确定出第二排出值不小于预定排出值(s121:否)时,控制器130结束联系信息传输过程。另一方面,当确定出第二排出值小于预定排出值(s121:是)时,控制器130如在第一说明性实施例中的那样执行从步骤s102到步骤s106的过程,并且结束联系信息传输过程。也就是说,当所获得的液位信号为“h”并且第二排出值小于预定排出值时,控制器130生成联系信息(s103和s105)。此后,控制器130传输联系信息,并且进一步将“开”存储在eeprom61的传输完成标志中(s106)。
[0239]
从打印机10传输的联系信息由信息收集服务器40接收。在接收到联系信息后,信息收集服务器40如在第一说明性实施例中的那样执行订购信息传输过程(图10a)。另外,由发送服务器50通过通信i/f53来接收通过图10a中所示的订购信息传输过程从信息收集服务器40传输的订购信息,并且接收到该订购信息的发送服务器50如在第一说明性实施例中的那样执行发送信息生成过程(图10b)。
[0240]
在第一变型中,控制器130根据第二排出值来传输联系信息,该第二排出值是在从液位传感器33输出的液位信号变为“h”之后通过头21排出的墨的排出量。因此,能够自由地选择包括控制器130的打印机10的液位传感器33的检测位置。
[0241]
此外,控制器130根据第二排出值来传输联系信息,该第二排出值是在从液位传感器33输出的液位信号变为“h”之后通过头21排出的墨的排出量。因此,能够通过改变预定排出值来自由地改变打印机10传输联系信息的时间。
[0242]
《第二变型》
[0243]
在上述第一说明性实施例中,已经给出了关于如下示例的描述,在该示例中,当控制器130在安装了盒200之后不传输联系信息(图9中的s100:“是”)并且确定出所获得的液位信号为“h”(图9中的s101:“是”)时,控制器130传输联系信息。在第二变型中,将描述如下示例,在该示例中,即使当由于液位传感器33或致动器190的故障而导致从液位传感器33输出的液位信号没有从“l”变为“h”时,控制器130也将联系信息传输到信息收集服务器40。
[0244]
在第二变型中,打印机10执行图14中所示的联系信息传输过程来代替图9中所示的联系信息传输过程。图14中所示的过程以外的其它过程与第一说明性实施例中所描述的那些过程相同。
[0245]
在第一变型中,打印机10执行图14中所示的联系信息传输过程。具体地,当从时钟30输出的日期/时间信息变为存储在rom37或eeprom61中的预定时间时,控制器130执行图14中所示的联系信息传输过程。例如,预定时间是诸如五分钟、十分钟或一小时的时间。控制器130以预定时间间隔执行联系信息传输过程。控制器130可以以预定时间间隔执行联系信息传输过程。例如,当由时钟30测量出的时间达到预定时间(诸如五分钟、十分钟或一小时)时,控制器130执行联系信息传输过程。
[0246]
联系信息传输过程是打印机10将联系信息传输到信息收集服务器40的过程。该联系信息与第一说明性实施例中的相同。将参照图13描述联系信息传输过程的细节。与第一说明性实施例中描述的联系信息传输过程(图9)相同的过程由与第一说明性实施例中的附图标记相同的附图标记表示,并且将不再给出其描述。
[0247]
首先,打印机10的控制器130确定eeprom61的传输完成标志的值是否为“关”(s100)。当确定出eeprom61的传输完成标志的值不是“关”即为“开”(s100:否)时,控制器130结束联系信息传输过程。当确定出eeprom61的传输完成标志的值为“关”(s100:是)时,
控制器130如在第一说明性实施例中的那样执行步骤s101的过程。当确定出所获得的液位信号不是“h”(s101:否)时,控制器130如在第一说明性实施例中的那样执行从步骤s102到步骤s106的过程,并且结束联系信息传输过程。
[0248]
另一方面,当确定出所获得的液体信号不是“h”(s101:否)时,控制器130执行步骤s131的过程。步骤s131的过程是确定在第二更新过程(图8b)的步骤s43中计算出的新的总剩余量值是否小于下限剩余量值的过程。
[0249]
下限剩余量值以如下方式来确定。如果液位传感器33或致动器190发生故障,则即使在存储在罐160的液体室171中的墨的液位位置由于执行打印或维护而从参考位置p的顶部下降到参考位置p的底部时,从液位传感器33输出的液位信号也不会从“l”变为“h”。然后,在图7中所示的步骤s18的确定过程中,控制器130不确定液位信号已经从“l”变为“h”。在这种情况下,继续执行步骤s19的第二更新过程。下限剩余量值被设定为当存储在罐160的液体室171中的墨的液位的位置比参考位置p低了一定量时的存储在罐160的液体室171中的墨的剩余量的值,所述一定量对应于液位传感器33的检测误差或第一排出值的误差。也就是说,如果在第二更新过程中计算出的新的总剩余量值小于下限剩余量值,则液位传感器33或致动器190很有可能发生了故障。在第二更新过程中计算出的新的总剩余量值是至少包括罐的第二液体室中的液体量的剩余量的示例。下限剩余量值是预定剩余量的示例。
[0250]
代替确定在步骤s43中计算出的新的总剩余量值是否小于下限剩余量值,控制器130可以确定第一排出值是否等于或大于预定值。该预定值是例如通过从总剩余量值中减去下限剩余量值而获得的值,该总剩余量值是初始盒剩余量值和初始罐剩余量值的总和。由于总剩余量值是使用第一排出值计算出的值,因此关于总剩余量值是否小于下限剩余量值的确定与关于总剩余量值是否小于下限剩余量值的确定是同义的。总剩余量值是否小于下限剩余量值的确定的另一个确定等同方案被包括在总剩余量值是否小于下限剩余量值的确定中。
[0251]
当确定出在步骤s43中计算出的新的总剩余量值不小于下限剩余量值(s131:否)时,控制器130结束联系信息传输过程。另一方面,当确定出在步骤s43中计算出的新的总剩余量值小于下限剩余量值(s131:是)时,控制器130生成包括紧急联系信息的联系信息(s103)。控制器130通过通信i/f31将生成的联系信息传输到信息收集服务器40,并且进一步将“开”存储在eeprom61的传输完成标志中(s106),从而结束联系信息传输过程。
[0252]
从打印机10传输的联系信息由信息收集服务器40接收。已经接收到联系信息的信息收集服务器40执行与第一说明性实施例的订购信息传输过程相同的订购信息传输过程(图10a)。已经通过通信i/f53接收到通过图10a中所示的订购信息传输过程从信息收集服务器40传输的订购信息的发送服务器50执行与第一说明性实施例的发送信息生成过程相同的发送信息生成过程(图10b)。
[0253]
在第二变型中,例如,即使当液位传感器33或致动器190损坏时,联系信息也被传输到信息收集服务器40。因此,很大可能的是,在存储在罐160的液体室171中的墨用完之前,新盒200被递送到用户的目的地。作为结果,可以减少存储在罐160的液体室171中的墨用完并且不能继续打印的担心。
[0254]
此外,在第二变型中,当确定出总剩余量值小于下限剩余量值(s131:是)时,控制
器130生成包括紧急信息的联系信息,并且将所生成的联系信息传输到信息收集服务器40。因此,与将不包括紧急信息的联系信息传输到信息收集服务器40的情况相比,新盒200被更早地递送到用户的目的地。作为结果,可以进一步减少存储在罐160的液体室171中的墨用完并且不能继续打印的担心。
[0255]
另外,当确定出总剩余量值小于下限剩余量值(s131:是)时,控制器130可以生成不包括紧急信息的联系信息。
[0256]
《第三变型》
[0257]
如在第一说明性实施例中的那样,上文在第二说明性实施例中描述的打印机10可以包括液位传感器33。
[0258]
在第三变型中,打印机10执行图15中所示的联系信息传输过程来代替图12中所示的联系信息传输过程。图15中所示的过程以外的其它过程与第一说明性实施例和第二说明性实施例中所描述的那些过程相同。与第一说明性实施例和第二说明性实施例的那些过程相同的过程由相同的附图标记表示,并且将不再给出其描述。
[0259]
首先,打印机10的控制器130确定eeprom61的传输完成标志的值是否为“关”(s100)。当确定出eeprom61的传输完成标志的值不是“关”即该值是“开”(s100:否)时,控制器130结束联系信息传输过程。当确定出eeprom61的传输完成标志的值为“关”(s100:是)时,控制器130如第二说明性实施例中的那样执行步骤s111的过程。当在第五更新过程(图11b1和图11b2)中计算出的新的总剩余量值不小于第一预定剩余量值(s111:否)时,控制器130结束联系信息传输过程。
[0260]
另一方面,当在第五更新过程中计算出的新的总剩余量值小于第一预定剩余量值(s111:是)时,如第一说明性实施例中的那样,控制器130执行从步骤s101至s106的过程。
[0261]
从打印机10传输的联系信息由信息收集服务器40接收。已经接收到联系信息的信息收集服务器40执行与第一说明性实施例的订购信息传输过程相同的订购信息传输过程(图10a)。通过图10a中所示的订购信息传输过程从信息收集服务器40的发送订购信息由发送服务器50通过通信i/f53接收。已经接收到订购信息的发送服务器50执行与第一说明性实施例中的发送信息生成过程相同的发送信息生成过程(图10b)。
[0262]
在该变型中,无论计算出的总剩余量值的误差如何,控制器130均将联系信息传输到信息收集服务器40。因此,进一步减少了在将新盒200递送到用户目的地之前存储在罐160的液体室171中的墨就被用完并且不能继续打印的担心。
[0263]
《其它变型》
[0264]
在上述第一说明性实施例中,描述了如下示例,在该示例中,在步骤s55(图8d)中计算了自从安装了盒200起直到从液位传感器33输出的液位信号从“l”变为“h”为止的经过时间。在第二说明性实施例中,描述了如下示例,在该示例中,在步骤s55(图11b1和图11b2)中计算了从安装了盒200时起直到总剩余量值变得小于第一预定剩余量值为止的经过时间。然而,可以计算从第二更新过程或第五更新过程中计算出的总剩余量值成为存储在rom37或eeprom61中的第一预定值(例如,该第一预定值与第一预定剩余量值相同)时起直到该总剩余量值变为比第一预定值小的第二预定值(该第二预定值大于第二预定剩余量值)为止的时间作为经过时间。也就是说,可以根据存储在盒200的液体室210中的墨的剩余量从由第一预定值指示的剩余量变为由第二预定值指示的剩余量的经过时间来确定存储
在盒200的液体室210中的墨的排出速率是否快。日期/时间信息是总剩余量值变为第一预定值时的预定时间点的示例。
[0265]
在以上描述中,盒200被安装在安装壳体150中的时间被描述为预定时间的示例,该预定时间是计算经过时间的起点。然而,可以将各种时间设定为计算经过时间的起点的预定时间,诸如自从盒200被安装在安装壳体150中起第一次通过头21排出墨的时间、第一次执行打印的时间等。
[0266]
在以上描述中,描述了如下示例,在该示例中,基于计算出的经过时间来确定是否在紧急标志中存储“开”(s56)。然而,基于计算出的经过时间,可以确定是立即还是稍后传输联系信息。具体地,打印机10的控制器130确定经过时间是否小于第一时间。在这种情况下,第一时间是预定时间的示例。
[0267]
当确定出经过时间小于第一时间时,在步骤s101的确定过程(s101:是)之后或者在步骤s111的确定过程(s111:是)之后,控制器130立即传输联系信息(s106)。立即传输联系信息意味着,例如,在不等待由时钟30输出的与指定时间对应的日期/时间信息的情况下进行传输。另一方面,不立即传输联系信息意味着,例如,在等待由时钟30输出的与指定时间对应的日期/时间信息的情况下传输联系信息。也就是说,当存储在盒200的液体室210中的墨的排出速率慢时,在每天或每周的指定时间传输联系信息,而当存储在盒200的液体室210中的墨的排出速率快时,无需等待每天或每周的指定时间就传输联系信息。当存储在盒200的液体室210中的墨的排出速率快时,由于立即传输了联系信息,因此,进一步减少了在将新盒200递送到用户目的地之前存储在罐160的液体室171中的墨就被用完并且不能继续打印的担心。
[0268]
在以上描述中,描述了如下示例,在该示例中,打印机10传输联系信息,并且已经接收到联系信息的信息收集服务器40通过通信i/f44将订购信息发送到发送服务器50。然而,由信息收集服务器40的控制器45执行的每一个过程都可以由打印机10的控制器130执行。换句话说,打印机10通过通信i/f31将订购信息传输到发送服务器50,而不是传输联系信息。在这种情况下,打印机10是液体排出系统的示例,并且打印机10和发送服务器50是递送系统的示例。打印机10的控制器130是控制器系统的示例。
[0269]
在以上描述中,描述了如下示例,在该示例中,由于水头差而使墨从盒200流出到罐160。然而,墨可以使用重力、泵等从盒200流出到罐160。也就是说,本公开还可以用于使用重力或驱动源将墨从盒200供应到罐160的打印机。
[0270]
在上述说明性实施例中,控制器130基于从液位传感器33输出的信号来检测致动器190的检测目标部194是处于第一状态还是第二状态。但是,液位传感器33的构造不受特别限定,只要能够检测液体室171中的墨的液位即可。例如,液位传感器33可以是用于光学地检测液体室171中的墨的液位的传感器,该传感器使用根据墨是否与液体室171的后壁164接触而具有不同反射率的棱镜。此外,液位传感器33可以是插入到液体室171中的电极棒。
[0271]
此外,在上述说明性实施例中,墨是液体的示例。然而,该液体可以是在打印时在墨之前先排出到片材等上的预处理液体,或者可以是用于清洁头21的水。
[0272]
如上所述,本公开可以提供至少以下说明性的非限制性实施例。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
