1.本技术涉及水下设备技术领域,特别涉及一种水下运动机构及水下机器人。
背景技术:
2.占据地球71%面积的海洋,里面拥有着丰富的资源,例如石油、铁等。随着科学技术的不断发展,我国在海洋科学研究方面得到快速的发展,越来越多的海洋资源被发现开采。水下机器人是海洋资源开采的重要设备之一,也随之得到了快速发展。
3.目前,常见的水下机器人一般通过以下方式提供动力:1、采用推进器提供动力;2、采用仿生学,模仿鱼类等水生动物的蹼翼摆动提供动力。其中,推进器提供动力,动力充足,但是控制精度较低,能耗大,姿态不易控制;而采用蹼翼摆动提供动力,在摆动回程时,会承受较大的阻力。对此,出现了一种水下机器人的尾部结构,该尾部结构能够在水中阻力较大时减小面积,并在水中阻力较小时增大面积,从而提高了尾部结构在水中的游动速率。但是,此种尾部结构需要提供用于驱动尾部结构增大面积及减小面积的驱动机构,驱动机构的增加,增大了尾部结构的重力,增大了尾部结构的惯量及体积,进而增加了整个水下机器人的阻力及控制难度。
技术实现要素:
4.本技术提供了一种水下运动机构及水下机器人,以解决现有技术中存在的水下机器人的尾部结构的惯量及体积大导致增加了水下机器人的阻力及控制难度的技术问题。
5.为解决上述问题,第一方面,本技术实施例提供的技术方案为:一种水下运动机构,包括第一驱动件、线绳及至少一个蹼组件;线绳连接于第一驱动件与蹼组件之间,线绳用于在第一驱动件的驱动下,带动蹼组件展开以增加蹼组件在水中的受力面积或者带动蹼组件收拢以减少蹼组件在水中的受力面积。
6.在一种可能的设计中,所述线绳一端与所述第一驱动件的输出端连接,所述线绳的另一端与所述蹼组件的输入端连接;所述水下运动机构还包括复位件,所述复位件一端固定,所述复位件另一端与所述蹼组件的输入端连接;
7.所述第一驱动件用于拉紧所述线绳以带动所述蹼组件的输入端移动并展开所述蹼组件;所述复位件用于在所述第一驱动件放松所述线绳时带动所述蹼组件的输入端复位并拉拢所述蹼组件;和/或,
8.所述第一驱动件用于向所述线绳提供大于所述复位件弹性力的拉力以使所述蹼组件的输入端移动并展开所述蹼组件;所述复位件用于在所述第一驱动件提供的拉力小于所述复位件的弹性力时带动所述蹼组件的输入端复位并拉拢所述蹼组件。
9.在一种可能的设计中,所述蹼组件包括:
10.固定杆;
11.至少两根活动杆,至少两根所述活动杆分别对称设于所述固定杆的相对两侧;
12.蹼片,分别固定于所述固定杆及至少两根活动杆上;
13.至少两个连杆结构,每根所述活动杆与所述固定杆之间均连接有所述连杆结构;所述连杆结构的输入端与所述线绳的另一端连接,所述连杆结构的输入端与所述复位件的另一端连接。
14.在一种可能的设计中,所述活动杆朝向所述第一驱动件的一端与所述固定杆朝向第一驱动件的一端铰接;所述活动杆能够在所述连杆结构的带动下相对所述固定杆转动,以带动所述蹼片展开或折叠。
15.在一种可能的设计中,所述连杆结构包括滑块及第一连杆,所述线绳及所述复位件均与所述滑块连接,所述滑块滑动设于所述固定杆上,所述第一连杆一端与所述滑块铰接,所述第一连杆另一端与对应的所述活动杆铰接。
16.在一种可能的设计中,所述固定杆上设有导向部,所述滑块通过所述导向部滑动设于所述固定杆上。
17.在一种可能的设计中,至少相对所述固定杆对称设置的两个所述活动杆对应的所述连杆结构共用一个所述滑块。
18.在一种可能的设计中,所述复位件为压缩弹簧,所述水下运动机构还包括导向杆及固定块,所述固定块安装于所述固定杆上并与所述滑块间隔设置,所述导向杆一端与所述固定块连接,所述滑块滑动套设有所述导向杆上,所述复位件套设于所述导向杆上并抵接于所述固定块与所述滑块之间。
19.在一种可能的设计中,所述蹼组件对应每根所述活动杆还设置有辅助杆,所述辅助杆与所述第一连杆分别设于所述活动杆的相对两侧,所述辅助杆一端与所述固定杆铰接,所述辅助杆另一端滑动设于所述活动杆上。
20.在一种可能的设计中,所述蹼片上形成有多个固定孔,所述固定杆及至少两个所述活动杆分别与各所述固定孔一一对应插接配合。
21.在一个可能的设计中,所述蹼片采用柔性并可折叠的材料制成,所述蹼片上设有多个折痕,所述蹼片能够沿着各所述折痕折叠。
22.在一个可能的设计中,所述蹼组件的输入端设有用于固定所述线绳另一端的固定件;
23.所述第一驱动件与所述固定件之间设有至少一个用于对所述线绳进行限位的限位件;和/或,
24.所述第一驱动件与所述固定件之间设有至少一个用于对所述线绳进行导向的导向轮。
25.在一种可能的设计中,所述水下运动机构还包括第二驱动件及连接件,所述第二驱动件用于输出旋转运动,所述连接件连接于所述第二驱动件的输出端与所述蹼组件之间,所述第二驱动件用于驱动所述蹼组件往复摆动;
26.其中,所述蹼组件的摆动方向、所述蹼组件的展开方向及所述蹼组件的前进方向两两相互垂直。
27.根据本技术实施例提供的水下运动机构,其通过柔性的线绳来实现第一驱动件对蹼组件的控制,使得第一驱动件可以安装在距离蹼组件较远的位置,从而使得在控制蹼组件往复摆动时,不需要克服第一驱动件的重力惯量,减小了蹼组件惯量,提高了蹼组件的往复摆动的控制精度。同时,通过第一驱动件及线绳带动蹼组件展开以增加蹼组件在水中的
受力面积或者带动蹼组件收拢以减少蹼组件在水中的受力面积,使得能够在蹼组件的一个摆动周期中通过对蹼组件面积的主动调节,使得蹼组件在游动过程中具有较大角度的张合功能,从而提高了水下机器人整体的游动速率。
28.另一方面,本技术还提供了一种水下机器人,包括上述水下运动机构。
29.本技术实施例提供的水下机器人,通过上述水下运动机构的设置,使得该水下机器人的运动惯量减少了,提高了水下机器人的运动控制精度,且提高了水下机器人整体的游动速率。
附图说明
30.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
31.图1是本技术实施例提供的水下运动机构的立体示意图;
32.图2是本技术实施例提供的水下运动机构的去掉线绳后的立体示意图;
33.图3是图2中水下运动机构的分解示意图;
34.图4是图2中水下运动机构的一个侧面示意图;
35.图5是图2中水下运动机构的另一个侧面示意图;
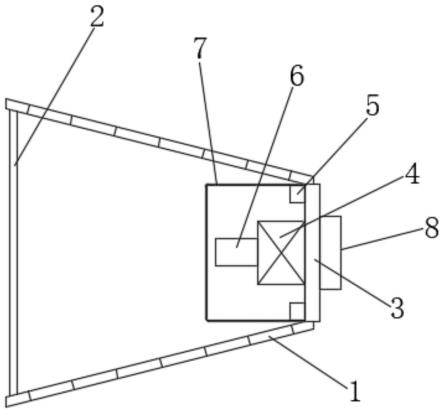
36.图6是本技术实施例提供的水下运动机构的蹼片的立体示意图;
37.图7是图6中蹼片的俯视示意图。
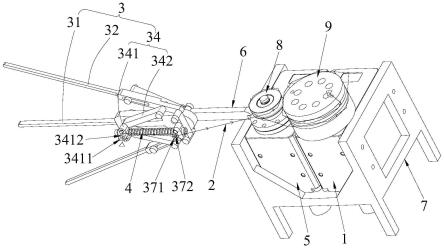
38.附图标记:1、第一驱动件;2、线绳;3、蹼组件;31、固定杆;311、滑槽;32、活动杆;321、导向槽;33、蹼片;331、固定孔;332、折痕;34、连杆结构;341、滑块;3411、第一挂耳;3412、第一线孔;342、第一连杆;35、安装块;36、导向杆;37、固定块;371、第二挂耳;372、第二线孔;38、辅助杆;4、复位件;5、第二驱动件;6、连接件;61、套接部;62、延伸部;7、机架;8、导向轮;9、绳轮。
具体实施方式
39.为使本技术实施例的目的、技术方案和优点更加清楚,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
40.在本技术的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。在本技术中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本技术中的具体含义。
41.在本技术中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。而且,第一特征在
第二特征“之上”、“上方”和“上面”可是第一特征在第二特征正上方或斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”可以是第一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度小于第二特征。
42.还需说明的是,本技术实施例中以同一附图标记表示同一组成部分或同一零部件,对于本技术实施例中相同的零部件,图中可能仅以其中一个零件或部件为例标注了附图标记,应理解的是,对于其他相同的零件或部件,附图标记同样适用。
43.第一方面,请参阅图1至图3,本技术实施例提供了一种水下运动机构,用于水下机器人中。
44.水下运动机构包括第一驱动件1、线绳2及至少一个蹼组件3。第一驱动件1用于输出旋转运动,线绳2连接于第一驱动件1与蹼组件3之间,线绳2用于在第一驱动件1的驱动下,带动蹼组件3展开以增加蹼组件3在水中的受力面积或者带动蹼组件3收拢以减少蹼组件3在水中的受力面积。
45.其中,请参阅图1,在本实施例中,该水下运动机构模拟鱼类在水中运动,因此,蹼组件3的数量是一个,通过一个蹼组件3在水中往复摆动以带动整个水下运动机构在水中运动。可以理解地,在本技术的其他实施例中,也可以模拟其他水下动物的结构,例如青蛙或乌龟等,则蹼组件3的数量也可以是两个或两个以上,此处不做唯一限定。
46.此外,还需要说明的是,线绳2在张紧时能够提供力,但是在松弛时不能提供动力,因此,上述线绳2主要用于在第一驱动件1的驱动下带动蹼组件3展开或者收拢。当线绳2用于在第一驱动件1的驱动下带动蹼组件3展开,则还需要设置另外的结构来带动蹼组件3收拢,例如复位件或另外一组线绳;同样的,当线绳2用于在第一驱动件1的驱动下带动蹼组件3收拢,则还需要设置另外的结构来带动蹼组件3展开,例如复位件或另外一组线绳。
47.请参阅图1及图2,在具体安装时,可以将第一驱动件1安装于一个机架7上,机架7与蹼组件3间隔设置,蹼组件3与第一驱动件1之间通过线绳2连接。此外,还可以将用于驱动蹼组件3整体摆动的第二驱动件5也安装于机架7上,当需要驱动蹼组件3往复摆动时,只需要承受蹼组件3的重量与惯性,而不需要承受第一驱动件1的重量与惯性,极大程度上减轻了蹼组件3的重量,减小了蹼组件3的运动惯量,提高蹼组件3的控制精度。
48.此外,还可以通过软件控制第一驱动件1,以达到在一个特定时间将蹼组件3展开,并在另一个特定的时间将蹼组件3收拢,以达到蹼组件3在水中驱动力最大,而受阻力最小的状态。例如,当蹼组件3在水中摆动时,在蹼组件3的推程中,蹼组件3在水中的驱动力大,可以控制蹼组件3展开;在蹼组件3的回程中,蹼组件3在水中的阻力大,可以控制蹼组件3收拢。
49.本技术实施例提供的水下运动机构,其通过柔性的线绳2来实现第一驱动件1对蹼组件3的控制,使得第一驱动件1可以安装在距离蹼组件3较远的位置,从而使得在控制蹼组件3往复摆动时,不需要克服第一驱动件1的重力惯量,减小了蹼组件3惯量,提高了蹼组件3的往复摆动的控制精度。同时,通过第一驱动件1及线绳2带动蹼组件3展开以增加蹼组件3在水中的受力面积或者带动蹼组件3收拢以减少蹼组件3在水中的受力面积,使得能够在蹼组件3的一个摆动周期中通过对蹼组件3面积的主动调节,使得蹼组件3在游动过程中具有较大角度的张合功能,从而提高了水下机器人整体的游动速率。
50.线绳2可以为普通的柔性绳,例如棉麻绳,线绳2也可以是钢丝绳或锁绳等。
51.第一驱动件1用于输出旋转运动,线绳2一端与第一驱动件1的输出端连接,线绳2的另一端与蹼组件3的输入端连接。水下运动机构还包括复位件4,复位件4一端固定,复位件4另一端与蹼组件3的输入端连接。在推程中,第一驱动件1用于旋转拉紧线绳2以带动蹼组件3的输入端移动并展开蹼组件3,此过程中,复位件4慢慢压缩并储存能量;在回程中,复位件4用于在第一驱动件1放松线绳2时带动蹼组件3的输入端复位并拉拢蹼组件3。在该实施例中,由于线绳2只有在拉紧的时候,才能够推动蹼组件3的输入端移动,因此需要配合复位件4,在第一驱动件1放松线绳2时,通过复位件4存储的能量来驱动蹼组件3的输入端复位,也即是带动蹼组件3收拢。可以理解地,在本技术的其他实施例中,也可以通过另一组线绳及驱动件来驱动蹼组件3的移动复位,此处不做特别限定。
52.此外,第一驱动件1为通过电流扭矩控制的舵机,通过舵机不仅能够拉紧线绳2,还能够提供给线绳2不同的拉力。例如,通过控制舵机向线绳2提供大于复位件4弹性力的拉力,从而使得线绳2能够推动蹼组件3移动,实现蹼组件3的展开;并通过控制舵机向线绳2提供小于复位件4的弹性力的拉力,使得复位件4能够推动蹼组件3复位并拉拢蹼组件3。此外,还可以通过控制舵机的电流以控制舵机旋转,而线绳2一端缠绕于舵机的输出轴上,从而带动线绳2拉紧或放松,进而实现蹼组件3的展开或收拢。
53.综上所述,在该实施例中,通过线绳2驱动及复位件4的相互配合,以达到准确控制动力,推程时展开,回程时闭合,减少摆动阻力,提高推力,降低能耗,提高效率。
54.在一个实施例中,请参阅图1及图2,水下运动机构还包括第二驱动件5及连接件6,第二驱动件5用于输出旋转运动,连接件6连接于第二驱动件5的输出端与蹼组件3之间,第二驱动件5用于驱动蹼组件3往复摆动;其中,蹼组件3的摆动方向、蹼组件3的展开方向及蹼组件3的前进方向两两相互垂直。
55.当水下运动机构潜入水中后,第二驱动件5一直在做往复旋转运动,从而通过连接件6带动蹼组件3在水中往复摆动,以驱动水下运动机构在水中前进;而在蹼组件3摆动的过程中,当蹼组件3在水中的阻力较小时,例如在蹼组件3的推程中,可以通过第一驱动件1经由线绳2带动蹼组件3展开以增大蹼组件3在水中的推动力;而在蹼组件3的回程中,可以通过复位件4带动蹼组件3收拢以减少蹼组件3在水中的阻力。本实施例通过第一驱动件1及第二驱动件5分别对蹼组件3的展开收拢及摆动进行控制,从而降低了蹼组件3的控制复杂度,提高了蹼组件3的控制精度。
56.第二驱动件5可以为舵机,通过舵机输出旋转运动,从而带动蹼组件3进行往复摆动。
57.请参阅图1及图2,水下运动机构还包括机架7,第一驱动件1及第二驱动件5均安装于机架7上,而机架7与蹼组件3间隔设置,第一驱动件1通过线绳2与蹼组件3形成连接,第二驱动件5通过连接件6与蹼组件3形成连接。如此设置,使得当第二驱动件5驱动蹼组件3摆动时,不需要对第一驱动件1进行摆动,从而减小了蹼组件3摆动时需要克服的重力惯性,进而提高了蹼组件3的控制精度。
58.请参阅图4及图5,连接件6包括套接部61及延伸部62,套接部61呈圆形并套设于第二驱动件5的输出轴上,延伸部62呈长条状,延伸部62一端与套接部61固定连接,延伸部62另一端与固定杆31通过紧固件连接。
59.在一个实施例中,请参阅图1至图5,蹼组件3包括蹼片33、固定杆31、至少两根活动
杆32及至少两个连杆结构34。固定杆31固定于连接件6上,至少两根活动杆32分别对称设于固定杆31的相对两侧,蹼片33分别固定于固定杆31及至少两根活动杆32上。每根活动杆32与固定杆31之间均连接有连杆结构34,连杆结构34的输入端与线绳2的另一端连接,连杆结构34的输入端与复位件4的另一端连接。
60.其中,固定杆31的一端安装于连接件6背离第二驱动件5的一端,第二驱动件5能够通过连接件6带动固定杆31、活动杆32、连杆结构34及蹼片33整体往复摆动。
61.线绳2的另一端及复位件4的另一端分别与连杆结构34的输入端连接;当线绳2被第一驱动件1驱动拉紧连杆结构34的输入端时,能够推动连杆结构34的输入端向第一驱动件1方向移动,从而推动活动杆32相对固定杆31展开,则折叠的蹼片33被两侧活动杆32带动由中间向两侧相对展开;当线绳2被第一驱动件1驱动松开连杆结构34的输入端时,连杆结构34的输入端能够在复位件4的带动下向远离第一驱动件1方向移动,从而推动活动杆32相互固定杆31收拢,则展开后的蹼片33被两侧活动杆32带动向中间对称折叠收拢。
62.此外,由于至少两个活动杆32分别对称设于固定杆31的相对两侧,至少两个连杆结构34也分别对称设于固定杆31的相对两侧,从而使得固定杆31两侧的活动杆32同步展开及同步收拢,使得整个蹼组件3在水中受力对称。
63.综上所述,本实施通过连杆结构34来将线绳2的拉力转换成活动杆32的展开或收拢,连杆结构34均为杆状结构,其占有空间小,且重量小,对蹼组件3的整体摆动惯性影响不大。
64.在一个实施例中,活动杆32朝向第一驱动件1的一端与固定杆31朝向第一驱动件1的一端铰接,活动杆32能够在连杆结构34的带动下相对固定杆31转动,以将蹼片33展开或折叠。
65.具体的,请参阅图2及图3,固定杆31一侧设有安装块35,固定杆31与安装块35固定连接,各活动杆32均与固定杆31设于安装块35的同一侧,各活动杆32的一端均通过销钉转动设于安装块35上,这样使得各活动杆32与固定杆31位于同一平面上,且各活动杆32的转动不会与固定杆31产生干涉。可以理解地,在本技术的其他实施例中,各活动杆32的一端也可以直接铰接于固定杆31上,此处不做特别限定。
66.在一个实施例中,请参阅图6及图7,蹼片33上形成有多个固定孔331,固定孔331贯穿蹼片33的相对两侧,固定杆31及至少两个活动杆32分别对应与各固定孔331一一对应插接配合,也即是将固定杆31及至少两个活动杆32插入各固定孔331中,从而形成蹼片33与固定杆31及至少两个活动杆32的连接,当活动杆32转动时,能够带动蹼片33展开或折叠。可以理解地,在本技术的其他实施例中,上述固定杆31及活动杆32也可以通过螺钉锁紧、粘贴或压合的方式固定于蹼片33上,此处不做特别限定。
67.在一个实施例中,蹼片33采用柔性并可折叠的材料制成,蹼片33上设有多个折痕332,蹼片33能够沿着各折痕332折叠,如此设置,使得蹼片33即具有柔性能够展开或折叠,且使得蹼片33在折叠后具有一定的结构强度,不会杂乱无章。
68.具体的,请参阅图6及图7,蹼片33上设置有多组依次等间隔设置的折痕组,每个折痕组包括两个间隔设置的折痕332,每个折痕组中的两个折痕332具有第一距离,相邻折痕组之间具有第二距离,第二距离大于第一距离。通过对第一距离的大小进行设置,使得在折叠后,折痕组中的两个折痕332之间形成半圆形,而相邻折痕组之间呈直线设置,最终使得
蹼片33在折叠后形成如图7所示的形状,使得蹼片33在折叠后结构整齐美观。
69.在一个实施例中,蹼片33采用橡胶材料制成,橡胶可折叠,且不会向布料那样折叠后杂乱无章。可以理解地,在本技术的其他实施例中,上述蹼片33也可以采用其他材料制成,例如硅胶。
70.在一个实施例中,请参阅图1至图5,连杆结构34包括滑块341及第一连杆342,线绳2及复位件4均与滑块341连接,滑块341滑动设于固定杆31上,第一连杆342一端与滑块341铰接,第一连杆342的另一端与对应的活动杆32铰接。
71.具体的,第一连杆342的另一端与活动杆32靠近安装块35的位置连接,由于第一连杆342的长度确定,当第一连杆342的一端在线绳2的拉动下向靠近安装块35的方向滑动时,将会通过第一连杆342的另一端推动活动杆32向远离固定杆31的方向旋转;当第一连杆342一端在复位件4的推动下向远离安装块35的方向滑动时,将会通过第一连杆342的另一端拉动活动杆32向靠近固定杆31的方向旋转。
72.本实施例通过滑块341及第一连杆342将线绳2及滑块341的推动力转换成活动杆32的旋转运动,其结构简单,且运动平稳。
73.在一个实施例中,固定杆31上设有导向部,滑块341通过导向部滑动设于固定杆31上。通过导向部的设置,使得滑块341在固定杆31上能够沿直线滑动,进而保证活动杆32的旋转平稳。
74.具体的,请参阅图4及图5,固定杆31上设有滑槽311,滑槽311沿固定杆31的长度方向延伸,滑块341与第一连杆342通过销钉铰接,且该销钉滑动设于滑槽311中,从而使得滑块341及第一连杆342的一端均沿滑槽311直线滑动。
75.在一个实施例中,请参阅图2及图4,至少相对固定杆31对称设置的两个活动杆32对应的连杆结构34共用一个滑块341,也即是只需通过一个线绳2及复位件4即可带动多个活动杆32转动。
76.在一个实施例中,蹼组件3包括一个固定杆31及两个活动杆32,两个活动杆32对称设于固定杆31的相对两侧,两个活动杆32与固定杆31之间均连接有一个连杆结构34,且两个连杆结构34共用一个滑块341,固定杆31对应两个活动杆32的位置均开设于滑槽311,滑块341通过两个销钉滑动设于两个滑槽311中,从而可以通过一个第一驱动件1、一根线绳2及一个复位件4即可实现活动杆32的展开及收拢。可以理解地,在本技术的其他实施例中,蹼组件3也可以包括四个或四个以上活动杆32,可以是四个活动杆32共用一个滑块341,也可以是在固定杆31的相对两侧分别设于滑块341,以实现四个及四个以上的活动杆32的展开或收拢。
77.在一个实施例中,请参阅图2至4,复位件4为压缩弹簧,水下运动机构还包括导向杆36及固定块37,固定块37安装于固定杆31上,固定块37与滑块341间隔设置,导向杆36一端与固定块37连接,滑块341滑动套设有导向杆36上,复位件4套设于导向杆36上并抵接于固定块37与滑块341之间。本实施例通过导向杆36的设置,从而能够对压缩弹簧的收缩进行导向,保证压缩弹簧对滑块341的推动力稳定。可以理解地,在本技术的其他实施例中,上述复位件4也可以是其他具有弹性的结构,例如弹片,此处不做特别限定。
78.在一个实施例中,请参阅图1,蹼组件3的输入端设有固定件,具体是在滑块341上设置固定件,固定件用于固定线绳2的另一端,例如滑块341上设有第一挂耳3411,第一挂耳
3411上述设有第一线孔3412,线绳2的另一端穿过第一线孔3412并打结固定。
79.由于第一驱动件1与滑块341之间的距离较大,为了保证线绳2在第一驱动件1与固定件之间不会凌乱,且不会处于松垮状态,本技术在第一驱动件1与固定件之间设有至少一个限位件,通过限位件对线绳2进行限位。
80.例如,请参阅图1,固定块37上设有第二挂耳371,第二挂耳371上设有第二线孔372,线绳2穿过第二线孔372设置,通过第二线孔372对线绳2起到限位的作用。可以理解地,在本技术的其他实施例中,也可以在固定杆31的其他不同位置设置线孔以限位线绳2。
81.此外,第一驱动件1与固定件之间设有至少一个导向轮8,通过导向轮8对线绳2进行导向。由于蹼组件3在第二驱动件5的驱动下会往复摆动,而在摆动过程中,第一驱动件1与固定件之间的线绳2的长度会产生变化,而在第一驱动件1与固定件之间设置导向轮8,可以使得线绳2缠绕于导向轮8上,在蹼组件3摆动过程中,线绳2在导向轮8上的缠绕长度可以增加或减少,从而保证了线绳2的张紧度,进而保证了线绳2对蹼组件3的驱动力。
82.请参阅图1及图2,导向轮8通过卡圈转动套设于第二驱动件5的旋转轴上,这样不仅可以实现对线绳2的张紧作用,同时还不用在蹼组件3上设置导向轮8,减少蹼组件3的重力惯量。可以理解地,在本技术的其他实施例中,也可以在蹼组件3上设置导向轮8,此处不做特别限定。
83.请参阅图1及图2,第一驱动件1的输出轴上设有绳轮9,线绳2一端缠绕于绳轮9设置。
84.在一个实施例中,请参阅图5,蹼组件3对应每根活动杆32还设置有辅助杆38,辅助杆38与第一连杆342分别设于活动杆32的相对两侧,辅助杆38一端与固定杆31铰接,辅助杆38另一端滑动设于活动杆32上。该实施例通过辅助杆38的设置,能够对活动杆32的摆动进行支撑,同时也加强了固定杆31与活动杆32的连接稳定性,使得整个蹼组件3结构连接牢固,不会出现变形或松脱现象。
85.具体的,活动杆32上设有导向槽321,辅助杆38另一端通过销钉滑动设于导向槽321中。
86.请参阅图1至图5,为了尽可能的减少活动杆32的重量,活动杆32对应具有导向槽321的位置的宽度大于其他位置的宽度。
87.同样的,为了尽可能减少固定杆31的重量,固定杆31对应两个滑槽311的位置的宽度大于其他位置的宽度。
88.第二方面,本技术实施例还提供了一种水下机器人,包括上述水下运动机构。例如水下机器人还包括机身,水下运动机构的机架7、第一驱动件1及第二驱动件5均安装于机身上。
89.以上所述,仅为本技术的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应以所述权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。