1.本发明涉及一种波浪滑翔器水下吊放系统及其定深测量控制方法。
背景技术:
2.海洋调查中经常需要对不同海域、不同深度的海水参数进行采集,比如常见的温度、盐度、深度等参数(ctd)。目前常见的方式是试验人员搭乘船只出海进行测量,这种方式成本高、风险大,尤其是当海况较差时风险较大且不适合海上作业。
3.随着海洋无人平台智能化的逐步提高,越来越多的海上调查作业采用无人平台。波浪滑翔器作为一种新型的海上无人平台具有航行距离远、适合高海况等优点,然而由于其利用波浪能为动力,具有体积小、动力弱等缺点,搭载的载荷体积和质量受限。在国内外一些应用案例中曾利用波浪滑翔器搭载ctd传感器,由于波浪滑翔器本身的特点,这些案例都只对海洋表层海水参数(50米以内)进行采集。若对更深的海水参数进行采集则需要更多的传感器节点和悬挂缆,由于海洋测量传感器一般比较昂贵,过多的传感器节点也会使成本变高。过长的悬挂缆也容易使波浪滑翔器与海洋垃圾缠绕风险增加,当波浪滑翔器航行至浅海时容易和海底礁石缠绕造成设备损坏并影响平台自身航行。此外过多的传感器节点和过长的悬挂缆将大大增加波浪滑翔器的航行阻力,严重影响波浪滑翔器的航速,且对波浪滑翔器的布放回收带来很大的困难。
4.目前,现有主机遥控系统不能很好地解决上述问题,如专利申请201811246630.1所述的多层次推进时空连续海水参数采样检测无人艇,虽然可以实现对海水参数采集装置的升降操作,但是其传感器是安装在拖曳体上,且拖曳体带有驱动水翼,在下放过程中易与海洋垃圾发送缠绕发生碰撞,造成传感器的损害;再如专利申请202010786710.7所述的黄海冷水团观测装置及方法,其仅对深度几十米的海水参数进行测量,无法对更深的海水参数进行采集,且无法避免与海洋垃圾的缠绕。此外,现有技术无法实现对指定深度的海水参数进行精确测量。因此,在波浪滑翔器水下吊放系统中融入下放海水环境监测和指定海水深度参数的精确测量,是现在波浪滑翔器水下吊放系统亟待解决的问题。
技术实现要素:
5.本发明所要解决的技术问题是:提供一种波浪滑翔器水下吊放系统,可以对水下设备如ctd传感器等进行吊放以实现不同深度的海水参数测量,且避免悬挂缆与海洋垃圾的缠绕。
6.为解决上述技术问题,本发明所采用的技术方案为:一种波浪滑翔器水下吊放系统,包括波浪滑翔器水面母船、波浪滑翔器水下推进器、母机、第一子机以及第二子机;母机通过母机安装板安装在波浪滑翔器水下推进器上,并通过防水连接器和波浪滑翔器的电源及波浪滑翔器主控板连接,第一子机通过空心大力马线缆悬挂在母机上,第二子机通过大力马线缆悬挂在母机上;
7.母机的壳体内设有电机,电机的输出轴通过联轴器与减速齿轮组的输入轴相连
接,减速齿轮组的输出轴通过联轴器与转动设置在母机内的主轴相连接;主轴上套有第一线轮与第二线轮,第一线轮与第二线轮被母机内壁分隔开,在第一线轮的一端设有第一电磁离合器,第一线轮的另一端处设有第一刹车器;
8.第一电磁离合器的一端固定在第一线轮上,第一电磁离合器的另一端嵌套在主轴上,当第一电磁离合器得电时,第一线轮随主轴转动;当第一电磁离合器失电时,第一线轮不随主轴转动;第一刹车器一端固定母机内壁上,第一刹车器另一端嵌套在第一线轮的端部,当第一刹车器作用时,第一线轮不转动,当第一刹车器不工作时,第一线轮可转动;
9.在第二线轮的一端设有第二电磁离合器,第二线轮的另一端设有第二刹车器;第二电磁离合器的一端固定在第二线轮上,第二电磁离合器的另一端嵌套在主轴上,当第二电磁离合器得电时,第二线轮随主轴转动;当第二电磁离合器失电时,第二线轮不随主轴转动;第二刹车器一端固定母机内壁上,第二刹车器另一端嵌套在第二线轮的端部,当第二刹车器作用时,第二线轮不转动,当第二刹车器不工作时,第二线轮可转动;
10.在第一子机的内部设有蓄水槽、第一无线充电接收线圈、第一子控制单元、第一电量测量器、第一可充电电池组、姿态传感器、以及采集传感器;在第二子机的内部设有第二无线充电接收线圈、第二子控制单元、海底摄像机、第二可充电电池组和第二电池组电量测量器;在母机内还设有水泵,水泵的入水口通过水管与海水相连,水泵的出水口通过水管与蓄水槽相连,且水管穿过空心大力马线缆缠绕在第一线轮上;母机内还设有第一无线充电发射线圈、第二无线充电发射线圈、母机控制单元、第一线缆长度测量器和第二线缆长度测量器;母机控制单元通过防水连接器与波浪滑翔器主控板建立数据连接并接收指令。
11.优选地,所述第一子机和所述第二子机为球形。
12.优选地,在第一线轮的下方设有用于存放和固定第一子机的第一凹槽,在第二线轮的下方设有用于存放和固定第二子机的第二凹槽。
13.优选地,所述第一凹槽中设有限制第一子机位置的第一弹性限位装置,所述第二凹槽中设有限制第二子机位置的第二弹性限位装置。
14.优选地,在第一线轮与减速齿轮组之间的母机内壁上分别设有第一密封圈与第二密封圈;在第一线轮与第二线轮之间的母机内壁上分别设有第三密封圈与第四密封圈。
15.本发明另一个所要解决的技术问题是:提供一种波浪滑翔器水下吊放系统的定深测量控制方法。
16.为解决上述技术问题,本发明所采用的技术方案为:波浪滑翔器水下吊放系统的定深测量控制方法,具体步骤如下:
17.步骤1:海水参数测量指令发送
18.步骤1-1:岸端向波浪滑翔器发送海水参数测量指令,指令内容包含测量类型、测量海域及测量深度h,其中测量类型包括区域深度模糊测量或定深度精确测量;
19.步骤1-2:波浪滑翔器行驶至待测量海域;
20.步骤2:吊放环境监测
21.步骤2-1:波浪滑翔器主控板通过防水连接器向母机控制单元发送吊放环境监测指令;
22.步骤2-2:母机控制单元接收吊放环境监测指令,先启用第一刹车器,再断开第一电磁离合器;同时先接通第二电磁离合器,再停止第二刹车器;
23.步骤2-3:母机控制单元启动电机,并通过第二无线充电发射线圈向第二子机发送环境监测指令;
24.步骤2-4:第二子机内的第二无线充电接收线圈接收指令后从休眠状态中激活;
25.步骤2-5:电机正转,大力马线缆下放,第二子机随之下放,在第二子机下放的同时,第二子机控制单元控制海底摄像机开始采集下放环境数据;并通过第二无线充电接收线圈把采集的环境数据传输给母机控制单元;
26.步骤2-6:在大力马线缆下放的同时,第二线缆长度测量器测量大力马线缆下放长度h1,并通过第二无线充电接收线圈把采集的环境数据传输给母机控制单元;
27.步骤2-7:母机控制单元通过第二无线充电发射线圈接收环境数据,并处理,判断海底摄像机所采集的环境数据内是否存在海洋垃圾、礁石等易与缆绳缠绕的物品;若存在海洋垃圾等,转至步骤2-8;若不存在海洋垃圾等,执行步骤2-12;
28.步骤2-8:母机控制单元控制电机反转,大力马线缆收回,第二子机随之上升;在大力马线缆收回的同时,第二线缆长度测量器测量大力马线缆收回长度h2,并传输至母机控制单元;
29.步骤2-9:母机控制单元通过第二无线充电发射线圈接收线缆数据,并进行如下判断:h1-h2=0是否成立?若成立,则表示第二子机回收完成,转至步骤2-10,若不成立,则转至步骤2-8;
30.步骤2-10:母机控制单元通过防水连接器向波浪滑翔器主控板发送海域范围内测量位置更换指令;
31.步骤2-11:波浪滑翔器主控板接收指令,控制波浪滑翔器更换测量位置,转至步骤2-1;
32.步骤2-12:母机控制单元通过第二无线充电发射线圈接收线缆数据,并进行如下判断:h-h1=0是否成立?若不成立,执行步骤2-5至步骤2-7,若成立,则表示第二子机下放至规定深度h,且下放环境安全,执行步骤2-13;
33.步骤2-13:母机控制单元停止电机,先启动第二刹车器,再断开第二电磁离合器;并通过第二无线充电发射线圈向第二子机发送停止环境监测指令;第二子机内的第二无线充电接收线圈接收指令,第二子机控制单元控制海底摄像机停止下放环境数据采集;
34.步骤3:测量类型判断
35.步骤3-1:波浪滑翔器主控板通过防水连接器向母机控制单元发送海水参数测量指令;
36.步骤3-2:母机控制单元进行海水参数测量类型判断:若指令内容为区域深度模糊测量,执行步骤4;若指令内容为定深度精确测量,执行步骤5;
37.步骤4:海水参数区域深度模糊测量
38.步骤4-1:母机控制单元接收区域深度模糊测量指令,先接通第一电磁离合器,再停止第一刹车器;
39.步骤4-2:母机控制单元启动电机,并通过第一无线充电发射线圈向第一子机发送数据采集指令;第一子机内的第一无线充电接收线圈接收指令后从休眠状态中激活;
40.步骤4-3:电机正转,空心大力马线缆下放,第一子机随之下放,在第一子机下放的同时,第一子机控制单元控制采集传感器开始采集海水参数;在空心大力马线缆下放的同
时,第一线缆长度测量器测量空心大力马线缆下放长度h3,并传输至母机控制单元;
41.步骤4-4:母机控制单元进行如下判断:h-h3=0是否成立?若成立,则表示第一子机被下放至指定深度,转至步骤4-5;若不成立,转至步骤4-3;
42.步骤4-5:母机控制单元停止电机,并通过第一无线充电发射线圈向第一子机发送数据停止采集指令;第一子机内的第一无线充电接收线圈接收指令,第一子机控制单元控制采集传感器停止海水参数采集;
43.步骤4-6:母机控制单元先接通第二电磁离合器,再停止第二刹车器,然后母机控制单元启动电机;
44.步骤4-7:母机控制单元控制电机反转,空心大力马线缆收回,第一子机随之上升,同时空心大力马线缆收回,第二子机随之上升;在空心大力马线缆收回的同时,第一线缆长度测量器测量空心大力马线缆收回长度h4,并传输至母机控制单元;
45.步骤4-8:母机控制单元进行如下判断:h-h4=0是否成立?若成立,则表示第一子机与第二子机收回完成,转至步骤4-9;若不成立,转至步骤4-7;
46.步骤4-9:第一子机通过第一无线充电接收线圈把采集传感器采集的数据传输给母机控制单元;
47.步骤4-10:母机控制单元通过第一无线充电发射线圈接收数据,并通过防水连接器传输给波浪滑翔器主控板;
48.步骤4-11:母机控制单元停止电机,并通过第一无线充电发射线圈向第一子机发送休眠指令;第一子机内的第一无线充电接收线圈接收指令后进入休眠状态,并执行步骤6;
49.步骤5:海水参数规定深度精确测量
50.步骤5-1:母机控制单元接收规定深度精确测量指令,先接通第一电磁离合器,再停止第一刹车器;
51.步骤5-2:母机控制单元启动电机,并通过第一无线充电发射线圈向第一子机发送数据采集指令;第一子机内的第一无线充电接收线圈接收指令后从休眠状态中激活;
52.步骤5-3:电机正转,空心大力马线缆下放,第一子机随之下放,在空心大力马线缆下放的同时,第一线缆长度测量器测量空心大力马线缆下放长度h5,与此同时,姿态传感器测量第一子机在下放过程中空心大力马线缆与水平面的角度θ,并传输至母机控制单元;
53.步骤5-4:母机控制单元进行如下判断:θ=90
°
是否成立?若不成立,转至步骤5-5;若成立,执行步骤5-7;
54.步骤5-5:母机控制单元启动水泵,水泵从海洋内抽取海水通过空心大力马线缆内的水管注入蓄水槽内,以增加第一子机的重量,从而抵消风浪的影响;
55.步骤5-6:姿态传感器测量第一子机在下放过程中空心大力马线缆与水平面的角度θ,并传输至母机控制单元,并执行步骤5-4;
56.步骤5-7:母机控制单元进行如下判断:h-h5=0是否成立?若成立,则表示第一子机被下放至指定深度,转至步骤5-8;若不成立,转至步骤5-3;
57.步骤5-8:母机控制单元停止电机和水泵,并通过第一无线充电发射线圈向第一子机发送数据采集指令;第一子机内的第一无线充电接收线圈接收指令,第一子机控制单元控制采集传感器开始采集海水参数,在经过时间t后,第一子机控制单元停止采集传感器采
集海水参数;
58.步骤5-9:母机控制单元先接通第二电磁离合器,再停止第二刹车器,然后母机控制单元启动电机;
59.步骤5-10:母机控制单元控制电机反转,空心大力马线缆收回,第一子机随之上升,同时空心大力马线缆收回,第二子机随之上升;在空心大力马线缆收回的同时,第一线缆长度测量器测量空心大力马线缆收回长度h6,并传输至母机控制单元;
60.步骤5-11:母机控制单元进行如下判断:h-h6=0是否成立?若成立,则表示第一子机与第二子机收回完成,转至步骤5-12;若不成立,转至步骤5-10;
61.步骤5-12:第一子机通过第一无线充电接收线圈把采集传感器采集的数据传输给母机控制单元;
62.步骤5-13:母机控制单元通过第一无线充电发射线圈接收数据,并通过防水连接器传输给波浪滑翔器主控板;
63.步骤5-14:母机控制单元停止电机,并通过第一无线充电发射线圈向第一子机发送休眠指令;第一子机内的第一无线充电接收线圈接收指令后进入休眠状态;
64.步骤5-15:母机控制单元启动水泵,水泵从蓄水槽抽取海水通过空心大力马线缆内的水管注入海洋内,并执行步骤6;
65.步骤6:可充电电池组电量测量
66.步骤6-1:第一电池组电量测量器测量第一可充电电池组的电量u1,第二电池组电量测量器测量第二可充电电池组的电量u2,并传输至母机控制单元;
67.步骤6-2:母机控制单元进行如下判断:
①
u1≤u3是否成立?若成立,执行步骤6-3至步骤6-4;若不成立,执行步骤6-7;
②
u2≤u3是否成立?若成立,执行步骤6-5至步骤6-6;若不成立,执行步骤6-7;其中,u3为充电阈值;
68.步骤6-3:母机通过第一无线充电发射线圈对第一可充电电池组进行充电;第一电池组电量测量器测量第一可充电电池组的电量u4,并传输至母机控制单元;
69.步骤6-4:母机控制单元进行如下判断:u4≥u5是否成立?若成立,执行步骤6-7;若不成立,转至步骤6-3;其中,u5为停止充电阈值;
70.步骤6-5:母机通过第二无线充电发射线圈对第二可充电电池组进行充电;第二电池组电量测量器测量第二可充电电池组的电量u6,并传输至母机控制单元;
71.步骤6-6:母机控制单元进行如下判断:u6≥u5是否成立?若成立,执行步骤6-7;若不成立,转至步骤6-5;其中,u5为停止充电阈值;
72.步骤6-7:结束。
73.本发明的有益效果是:
74.本发明的波浪滑翔器水下吊放系统,通过吊放装置实现不同深度海水的参数测量,通过无线充电模组实现充电、数据传输。由于采用吊放方式对于不同深度的参数只需一个传感器即可实现,降低了成本。由于采用无线充电模组为传感器电池组充电保证了传感器可以长时间工作。
75.本发明的波浪滑翔器水下吊放系统还利用无线充电模组进行数据传输,在每次测量结束后传感器的测量数据即可通过无线充电模组传给波浪滑翔器,波浪滑翔器再由卫星传回地面站,保证了数据的实时性。
76.本发明的波浪滑翔器水下吊放系统由于传感器悬挂线缆没有涉及电连接,减小了线缆直径,即使在测量时航行阻力也可以忽略。采用吊放方式进行海水参数测量,在测量完成后传感器及时回收,避免了悬挂带来损坏并减少了航行阻力。
77.本发明的波浪滑翔器水下吊放系统在进行ctd传感器下放之前,先对待测海域的下放环境进行侦测,确保下放海域没有海洋垃圾,已确保ctd传感器的成功下放。
78.本发明的波浪滑翔器水下吊放系统在进行定深海水参数精确测量时,通过姿态传感器测量装载ctd传感器的子机在海水中的偏差角度,在通过水泵向装载ctd传感器的子机内的蓄水槽内注水,增加子机的重量,用以抵消海水流向的影响,使子机维持在待测深度,实现海水参数的精确测量。
附图说明
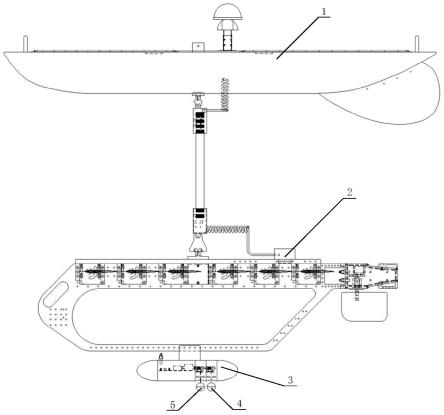
79.图1为本发明的波浪滑翔器水下吊放系统安装结构图
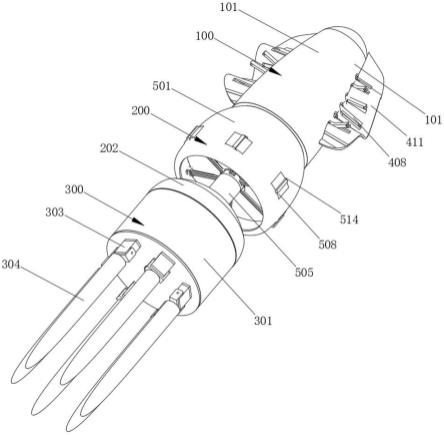
80.图2为本发明的吊放系统中母机与子机结构图
81.图3为本发明的吊放系统的控制系统的组成图
82.图中:1-波浪滑翔器水面母船,2-波浪滑翔器水下推进器,3-母机,300-防水连接器,301-母机安装板,302-电机,303-减速齿轮组,304-第一密封圈,305-第二密封圈,306-第三密封圈,307-第四密封圈,308-第二电磁离合器,309-第二线轮,310-主轴,311-大力马线缆,312-第二无线充电发射线圈,313-第二弹性限位装置,314-第二凹槽,315-第一凹槽,316-第一弹性限位装置,317-空心大力马线缆,318-第一无线充电发射线圈,319-第一线轮,320-第一电磁离合器,321-水泵,322-母机控制单元,323-第二刹车器,324-第一刹车器;4-第一子机,40-第二无线充电接收线圈,41-第二子机控制单元,42-海底摄像机,43-第二可充电电池组;5-第一子机,50-蓄水槽,51-第一无线充电接收线圈,52-第一子机控制单元,53-第一可充电电池组,54-姿态传感器,55-采集传感器;6-波浪滑翔器主控板,7-第一电池组电量测量器,8-第二电池组电量测量器,9-第一线缆长度测量器,10-第二线缆长度测量器。
具体实施方式
83.下面结合附图,详细描述本发明的具体实施方案。
84.如图1-3所示,波浪滑翔器水下吊放系统,包括波浪滑翔器水面母船1、波浪滑翔器水下推进器2、母机3、第一子机5以及第二子机4;母机3通过母机安装板301安装在波浪滑翔器水下推进器2上,并通过防水连接器300和波浪滑翔器的电源及波浪滑翔器主控板6连接,第一子机5通过空心大力马线缆317穿过陶瓷过线孔悬挂在母机3上,第二子机4通过大力马线缆311穿过陶瓷过线孔悬挂在母机3上。
85.如图2所示,母机3的壳体内设有电机302,电机302的输出轴通过联轴器与减速齿轮组303的输入轴相连接,减速齿轮组303的输出轴通过联轴器与转动设置在母机3内的主轴310相连接;主轴310上套有第一线轮319与第二线轮309,第一线轮319与第二线轮309被母机3内壁分隔开,在第一线轮319的一端设有第一电磁离合器320,第一线轮319的另一端处设有第一刹车器324;
86.第一电磁离合器320的一端固定在第一线轮319上,第一电磁离合器320的另一端
嵌套在主轴310上,当第一电磁离合器320得电时,第一线轮319随主轴310转动;当第一电磁离合器320失电时,第一线轮319不随主轴310转动;
87.第一刹车器324一端固定母机3内壁上,第一刹车器324另一端嵌套在第一线轮319的端部,当第一刹车器324作用时,第一线轮319不转动,当第一刹车器324不工作时,第一线轮319可转动;
88.在第二线轮309的一端设有第二电磁离合器308,第二线轮309的另一端设有第二刹车器323;第二电磁离合器308的一端固定在第二线轮309上,第二电磁离合器308的另一端嵌套在主轴310上,当第二电磁离合器308得电时,第二线轮309随主轴310转动;当第二电磁离合器308失电时,第二线轮309不随主轴310转动;第二刹车器323一端固定母机3内壁上,第二刹车器323另一端嵌套在第二线轮309的端部,当第二刹车器323作用时,第二线轮309不转动,当第二刹车器323不工作时,第二线轮309可转动;
89.在第一子机5的内部设有蓄水槽50、第一无线充电接收线圈51、第一子控制单元52、第一电量测量器7、第一可充电电池组53、姿态传感器54、以及采集传感器55;;在第二子机4的内部设有第二无线充电接收线圈40、第二子控制单元41、海底摄像机42、第二可充电电池组43和第二电池组电量测量器8;在母机内还设有水泵321,水泵321的入水口通过水管与海水相连,水泵321的出水口通过水管与蓄水槽50相连,且水管穿过空心大力马线缆317缠绕在第一线轮319上;母机3内还设有第一无线充电发射线圈318、第二无线充电发射线圈312、母机控制单元322、第一线缆长度测量器9和第二线缆长度测量器10;母机控制单元322通过防水连接器300与波浪滑翔器主控板6建立数据连接并接收指令。
90.第一子机5和第二子机4为球形。
91.在第一线轮319的下方设有用于存放和固定第一子机5的第一凹槽315,在第二线轮309的下方设有用于存放和固定第二子机4的第二凹槽314。
92.所述第一凹槽315中设有限制第一子机5位置的第一弹性限位装置316,所述第二凹槽314中设有限制第二子机4位置的第二弹性限位装置313。在第一线轮319与减速齿轮组303之间的母机3内壁上分别设有第一密封圈304与第二密封圈305;在第一线轮319与第二线轮309之间的母机3内壁上分别设有第三密封圈306与第四密封圈307。
93.波浪滑翔器水下吊放系统的定深测量控制方法如下:
94.步骤1:海水参数测量指令发送
95.步骤1-1:岸端向波浪滑翔器发送海水参数测量指令,指令内容包含测量类型、测量海域及测量深度h,其中测量类型包括区域深度模糊测量或定深度精确测量;
96.步骤1-2:波浪滑翔器行驶至待测量海域;
97.步骤2:吊放环境监测
98.步骤2-1:波浪滑翔器主控板6通过防水连接器300向母机控制单元322发送吊放环境监测指令;
99.步骤2-2:母机控制单元322接收吊放环境监测指令,先启用第一刹车器324,再断开第一电磁离合器320;同时先接通第二电磁离合器308,再停止第二刹车器323;
100.步骤2-3:母机控制单元322启动电机302,并通过第二无线充电发射线圈312向第二子机4发送环境监测指令;
101.步骤2-4:第二子机4内的第二无线充电接收线圈40接收指令后从休眠状态中激
活;
102.步骤2-5:电机302正转,大力马线缆311下放,第二子机4随之下放,在第二子机4下放的同时,第二子机控制单元41控制海底摄像机42开始采集下放环境数据;并通过第二无线充电接收线圈40把采集的环境数据传输给母机控制单元322;
103.步骤2-6:在大力马线缆311下放的同时,第二线缆长度测量器10测量大力马线缆311下放长度h1,并通过第二无线充电接收线圈40把采集的环境数据传输给母机控制单元322;
104.步骤2-7:母机控制单元322通过第二无线充电发射线圈312接收环境数据,并处理,判断海底摄像机42所采集的环境数据内是否存在海洋垃圾、礁石等易与缆绳缠绕的物品;若存在海洋垃圾等,转至步骤2-8;若不存在海洋垃圾等,执行步骤2-12;
105.步骤2-8:母机控制单元322控制电机302反转,大力马线缆311收回,第二子机4随之上升;在大力马线缆311收回的同时,第二线缆长度测量器10测量大力马线缆311收回长度h2,并传输至母机控制单元322;
106.步骤2-9:母机控制单元322通过第二无线充电发射线圈312接收线缆数据,并进行如下判断:h1-h2=0是否成立,若成立,则表示第二子机4回收完成,转至步骤2-10,若不成立,则转至步骤2-8;
107.步骤2-10:母机控制单元322通过防水连接器300向波浪滑翔器主控板6发送海域范围内测量位置更换指令;
108.步骤2-11:波浪滑翔器主控板6接收指令,控制波浪滑翔器更换测量位置,转至步骤2-1;
109.步骤2-12:母机控制单元322通过第二无线充电发射线圈312接收线缆数据,并进行如下判断:h-h1=0是否成立,若不成立,执行步骤2-5至步骤2-7,若成立,则表示第二子机4下放至规定深度h,且下放环境安全,执行步骤2-13;
110.步骤2-13:母机控制单元322停止电机302,先启动第二刹车器323,再断开第二电磁离合器308;并通过第二无线充电发射线圈312向第二子机4发送停止环境监测指令;第二子机4内的第二无线充电接收线圈40接收指令,第二子机控制单元41控制海底摄像机42停止下放环境数据采集;
111.步骤3:测量类型判断
112.步骤3-1:波浪滑翔器主控板6通过防水连接器300向母机控制单元322发送海水参数测量指令;
113.步骤3-2:母机控制单元322进行海水参数测量类型判断:若指令内容为区域深度模糊测量,执行步骤4;若指令内容为定深度精确测量,执行步骤5;
114.步骤4:海水参数区域深度模糊测量
115.步骤4-1:母机控制单元322接收区域深度模糊测量指令,先接通第一电磁离合器320,再停止第一刹车器324;
116.步骤4-2:母机控制单元322启动电机302,并通过第一无线充电发射线圈318向第一子机5发送数据采集指令;第一子机5内的第一无线充电接收线圈51接收指令后从休眠状态中激活;
117.步骤4-3:电机302正转,空心大力马线缆317下放,第一子机5随之下放,在第一子
机5下放的同时,第一子机控制单元52控制采集传感器55开始采集海水参数;在空心大力马线缆317下放的同时,第一线缆长度测量器9测量空心大力马线缆317下放长度h3,并传输至母机控制单元322;
118.步骤4-4:母机控制单元322进行如下判断:h-h3=0是否成立?若成立,则表示第一子机5被下放至指定深度,转至步骤4-5;若不成立,转至步骤4-3;
119.步骤4-5:母机控制单元322停止电机302,并通过第一无线充电发射线圈318向第一子机5发送数据停止采集指令;第一子机5内的第一无线充电接收线圈51接收指令,第一子机控制单元52控制采集传感器55停止海水参数采集;
120.步骤4-6:母机控制单元322先接通第二电磁离合器308,再停止第二刹车器323,然后母机控制单元322启动电机302;
121.步骤4-7:母机控制单元322控制电机302反转,空心大力马线缆317收回,第一子机5随之上升,同时空心大力马线缆317收回,第二子机4随之上升;在空心大力马线缆317收回的同时,第一线缆长度测量器9测量空心大力马线缆317收回长度h4,并传输至母机控制单元322;
122.步骤4-8:母机控制单元322进行如下判断:h-h4=0是否成立?若成立,则表示第一子机5与第二子机4收回完成,转至步骤4-9;若不成立,转至步骤4-7;
123.步骤4-9:第一子机5通过第一无线充电接收线圈51把采集传感器55采集的数据传输给母机控制单元322;
124.步骤4-10:母机控制单元322通过第一无线充电发射线圈318接收数据,并通过防水连接器300传输给波浪滑翔器主控板6;
125.步骤4-11:母机控制单元322停止电机302,并通过第一无线充电发射线圈318向第一子机5发送休眠指令;第一子机5内的第一无线充电接收线圈51接收指令后进入休眠状态,并执行步骤6;
126.步骤5:海水参数规定深度精确测量
127.步骤5-1:母机控制单元322接收规定深度精确测量指令,先接通第一电磁离合器320,再停止第一刹车器324;
128.步骤5-2:母机控制单元322启动电机302,并通过第一无线充电发射线圈318向第一子机5发送数据采集指令;第一子机5内的第一无线充电接收线圈51接收指令后从休眠状态中激活;
129.步骤5-3:电机302正转,空心大力马线缆317下放,第一子机5随之下放,在空心大力马线缆317下放的同时,第一线缆长度测量器9测量空心大力马线缆317下放长度h5,与此同时,姿态传感器54测量第一子机5在下放过程中空心大力马线缆317与水平面的角度θ,并传输至母机控制单元322;
130.步骤5-4:母机控制单元322进行如下判断:θ=90
°
是否成立?若不成立,转至步骤5-5;若成立,执行步骤5-7;
131.步骤5-5:母机控制单元322启动水泵321,水泵321从海洋内抽取海水通过空心大力马线缆317内的水管注入蓄水槽50内,以增加第一子机5的重量,从而抵消风浪的影响;
132.步骤5-6:姿态传感器54测量第一子机5在下放过程中空心大力马线缆317与水平面的角度θ,并传输至母机控制单元322,并执行步骤5-4;
133.步骤5-7:母机控制单元322进行如下判断:h-h5=0是否成立?若成立,则表示第一子机5被下放至指定深度,转至步骤5-8;若不成立,转至步骤5-3;
134.步骤5-8:母机控制单元322停止电机302和水泵321,并通过第一无线充电发射线圈318向第一子机5发送数据采集指令;第一子机5内的第一无线充电接收线圈51接收指令,第一子机控制单元52控制采集传感器55开始采集海水参数,在经过时间t后,第一子机控制单元52停止采集传感器55采集海水参数;
135.步骤5-9:母机控制单元322先接通第二电磁离合器308,再停止第二刹车器323,然后母机控制单元322启动电机302;
136.步骤5-10:母机控制单元322控制电机302反转,空心大力马线缆317收回,第一子机5随之上升,同时空心大力马线缆317收回,第二子机4随之上升;在空心大力马线缆317收回的同时,第一线缆长度测量器9测量空心大力马线缆317收回长度h6,并传输至母机控制单元322;
137.步骤5-11:母机控制单元322进行如下判断:h-h6=0是否成立?若成立,则表示第一子机5与第二子机4收回完成,转至步骤5-12;若不成立,转至步骤5-10;
138.步骤5-12:第一子机5通过第一无线充电接收线圈51把采集传感器55采集的数据传输给母机控制单元322;
139.步骤5-13:母机控制单元322通过第一无线充电发射线圈318接收数据,并通过防水连接器300传输给波浪滑翔器主控板6;
140.步骤5-14:母机控制单元322停止电机302,并通过第一无线充电发射线圈318向第一子机5发送休眠指令;第一子机5内的第一无线充电接收线圈51接收指令后进入休眠状态;
141.步骤5-15:母机控制单元322启动水泵321,水泵321从蓄水槽50抽取海水通过空心大力马线缆317内的水管注入海洋内,并执行步骤6;
142.步骤6:可充电电池组电量测量
143.步骤6-1:第一电池组电量测量器7测量第一可充电电池组53的电量u1,第二电池组电量测量器8测量第二可充电电池组43的电量u2,并传输至母机控制单元322;
144.步骤6-2:母机控制单元322进行如下判断:
①
u1≤u3是否成立?若成立,执行步骤6-3至步骤6-4;若不成立,执行步骤6-7;
②
u2≤u3是否成立?若成立,执行步骤6-5至步骤6-6;若不成立,执行步骤6-7;其中,u3为充电阈值;
145.步骤6-3:母机3通过第一无线充电发射线圈318对第一可充电电池组53进行充电;第一电池组电量测量器7测量第一可充电电池组53的电量u4,并传输至母机控制单元322;
146.步骤6-4:母机控制单元322进行如下判断:u4≥u5是否成立?若成立,执行步骤6-7;若不成立,转至步骤6-3;其中,u5为停止充电阈值;
147.步骤6-5:母机3通过第二无线充电发射线圈312对第二可充电电池组43进行充电;第二电池组电量测量器8测量第二可充电电池组43的电量u6,并传输至母机控制单元322;
148.步骤6-6:母机控制单元322进行如下判断:u6≥u5是否成立?若成立,执行步骤6-7;若不成立,转至步骤6-5;其中,u5为停止充电阈值;
149.步骤6-7:结束。
150.上述的实施例仅例示性说明本发明创造的原理及其功效,以及部分运用的实施
例,而非用于限制本发明;应当指出,对于本领域的普通技术人员来说,在不脱离本发明创造构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。