1.本发明涉及定位定向技术领域,具体而言,涉及一种基于短基线的定位定向方法及装置。
背景技术:
2.近年来,卫星导航系统的应用领域不断得到拓展,人们期望将其应用于高精度测量和定位领域,如测绘、农业、防灾救灾、航空航海等领域。定位定向方法是对高精度载波相位测量的一种应用,通过对卫星高精度的载波相位进行测量计算,可实现厘米级甚至毫米级的定位精度,也可在短基线相对定位中实现高精度的定向功能。因此,结合北斗卫星系统在全球投入应用,在定位定向方法的应用领域开展研究,是一个极具现实意义和战略价值的方向。
3.现有定位定向装置通常包括两个卫星定位芯片和一个处理器,两个卫星定位芯片接收卫星信号并输出定位信息和观测值给处理器,处理器单独实现定向功能,此类定位定向装置的成本和功耗都很高。
技术实现要素:
4.本发明旨在提供一种基于短基线的定位定向方法及装置,以解决现有的定位定向装置的成本和功耗都很高的问题。
5.本发明提供的一种基于短基线的定位定向方法,包括如下步骤:
6.s100、定位定向装置的双核处理器的第一核,通过第一天线获得第一伪距观测值和第一载波相位观测值,并通过第二天线获得第二伪距观测值和第二载波相位观测值;同时,第一核经过处理得到站星距的单位化视向矢量;然后将第一伪距观测值和第一载波相位观测值,第二伪距观测值和第二载波相位观测值,以及站星距的单位化视向矢量写入第一核和第二核的共享地址空间;
7.s200、第二核从共享地址空间读取第一伪距观测值和第一载波相位观测值,第二伪距观测值和第二载波相位观测值,以及站星距的单位化视向矢量,建立定向gnss数学模型,并求解双差载波相位整周模糊度的浮点解及其协方差矩阵;
8.s300、根据双差载波相位整周模糊度的浮点解及其协方差矩阵,求解第一天线指向第二天线的基线向量的固定解;
9.s400、基于第一天线指向第二天线的基线向量的固定解,求解航向角,得出定位定向结果。
10.进一步的,步骤s100包括如下子步骤:
11.s101、双核处理器的第一核通过捕获和跟踪第一天线的卫星信号,获得第一伪距观测值和第一载波相位观测值,并通过捕获和跟踪第二天线的卫星信号,获得第二伪距观测值和第二载波相位观测值;
12.s102、第一核采用单点定位方法得到第一天线的定位结果,利用卫星信号星历计
算卫星位置,得到站星距的单位化视向矢量,表示为:
[0013][0014]
其中,符号g表示星座的标识;符号k表示卫星,频率用li区别;
[0015]
s103、第一核将第一伪距观测值和第一载波相位观测值,第二伪距观测值和第二载波相位观测值,以及站星距的单位化视向矢量写入第一核和第二核的共享地址空间。
[0016]
进一步的,步骤s200包括如下子步骤:
[0017]
s201、第二核从共享地址空间读取第一伪距观测值和第一载波相位观测值,第二伪距观测值和第二载波相位观测值,以及站星距的单位化视向矢量;
[0018]
s202、在第二核中建立定向gnss数学模型;
[0019]
s203、利用读取的第一伪距观测值和第一载波相位观测值,第二伪距观测值和第二载波相位观测值,以及站星距的单位化视向矢量,并基于定向gnss数学模型,建立单历元双差模型;
[0020]
s204、基于单历元双差模型,采用正交投影法求解双差载波相位整周模糊度的浮点解及其协方差矩阵。
[0021]
进一步的,步骤s202中,所述定向gnss数学模型用线性观测方程的方式表述为:
[0022]
e(y)=aa bb,d(y)=qy,a∈zn,b∈r3[0023]
其中:y是观测向量;a是整周模糊度向量,属于n维整数向量zn;b是当地水平坐标系下的基线向量,属于3维实数向量r3;a是整周模糊度向量a的设计矩阵;b是基线向量b的设计矩阵;qy是观测向量y的方差协方差矩阵,反应其统计特性;e(
·
)代表期望算子;d(
·
)代表方差算子。
[0024]
进一步的,步骤s203包括如下子步骤:
[0025]
s2031、单差:
[0026]
对于第一伪距观测值和第一载波相位观测值以及第二伪距观测值和第二载波相位观测值,假设对于gnss星座g有mg颗可见星,在其li频率上的原始载波相位测量方差为原始伪距测量方差为将这mg颗可见星的单差载波相位观测方程和单差伪距观测方程分别联立,整理成单差矩阵方程:
[0027][0028][0029]
其中,表示星座g的li频率上的单差载波相位观测向量,单位为周;表示星座g的li频率上的单差伪距观测向量,单位为周;eg表示星座g的所有可见星的单位化视向矢量矩阵,维数为mg×
3;表示星座g的li频率上的单差载波相位观测向量的噪声;表示星座g的li频率上的单差伪距观测向量的噪声;表示星座g的li频率上的单差
载波相位的整周模糊度向量;τ=c(δt
a-δtb)表示两个接收装置的钟差,单位为米;表示一个列向量,其元素全部为1,维数为mg;表示维数为mg的单位矩阵;
[0030]
上述向量和矩阵的具体结构表示如下:
[0031][0032][0033]
其中,表示星座g的li频率上的卫星k在第一天线的位置a与第二天线的位置b之间的单差载波相位观测量;表示星座g的li频率上的卫星k在第一天线的位置a与第二天线的位置b之间的单差伪距观测量;表示星座g的li频率上的卫星k在第一天线的位置a与第二天线的位置b之间的单差载波相位的整周模糊度;表示星座g的li频率上的卫星k在第一天线的位置a与第二天线的位置b之间的单差载波相位观测量的噪声;表示星座g的li频率上的卫星k在第一天线的位置a与第二天线的位置b之间的单差伪距观测量的噪声;卫星符号k=1、2
…
mg。
[0034]
s2032,双差:
[0035]
指定某颗星作为参考星,用其它卫星的单差观测方程与其作差,则对于星座g的mg颗卫星得到(m
g-1)个双差方程;定义双差算子:
[0036][0037]
在单差矩阵方程的左右同时左乘双差算子,得到双差矩阵方程:
[0038][0039][0040]
将双差矩阵方程进一步写成如下形式:
[0041][0042]
该形式与步骤s202中的定向gnss数学模型相统一,即:
[0043][0044]
其中:
[0045][0046][0047][0048][0049][0050]
其中,符号表示克罗内克积运算。
[0051]
进一步的,步骤s204包括:
[0052]
设定是投影到设计矩阵b的子空间的正交投影算子:
[0053][0054][0055]
再定义得到双差载波相位整周模糊度的浮点解及其协方差矩阵:
[0056][0057][0058]
基于整周模糊度的浮点解,得到基线向量的条件解及其协方差矩阵:
[0059][0060][0061]
进一步的,步骤s300中求解第一天线指向第二天线的基线向量的固定解的方法为:
[0062]
基于s2中得到的双差载波相位整周模糊度的浮点解及其协方差矩阵,采用lambda算法来实现整周模糊度的搜索,即,使以下目标函数最小的a作为双差整周模糊度向量的固
定解
[0063][0064]
从而得到与该双差整周模糊度向量的固定解对应的基线向量的固定解
[0065]
进一步的,步骤s300包括如下子步骤:
[0066]
s301、双差整周模糊度去相关;
[0067]
去相关过程即对双差整周模糊度向量的浮点解进行z变换:
[0068][0069][0070]
其中,和表示z变换后的双差整周模糊度向量的浮点解及其协方差矩阵,z表示z变换矩阵;
[0071]
s302、离散搜索;
[0072]
经过步骤s301中z变换后,搜索空间是一个多维的超椭球体,中心在χ2和分别控制这个多维的超椭球体的大小和形状:
[0073][0074]
对进行l
t
dl分解,然后确定搜索空间χ2,以序贯条件最小二乘搜索得到候选向量解,也即双差整周模糊度向量的浮点解
[0075]
s303、模糊度确认;
[0076]
将步骤s302中得到的候选向量进行逆z变换,并进行模糊度确认;用候选向量解去修正基线向量的浮点解可得:
[0077][0078]
最小二乘估计的残差:
[0079][0080]
选取候选向量解中残差最小的候选向量解作为最终的双差整周模糊度向量的固定解从而双差整周模糊度向量的固定解对应的基线向量的固定解
[0081]
进一步的,步骤s400包括如下子步骤:
[0082]
s401、以第一天线的位置a为坐标原点建立东北天坐标系,第二天线位于位置b处,b’为位置b在东北天坐标系的xoy平面内的投影,则基线向量在xoy平面内的投影与北向的夹角α称为载体的航向角,而与xoy平面的夹角β称为载体的俯仰角。
[0083]
s402、将第一天线与第二天线构成的基线向量即为基线向量的固定解记为则定向解算的航向角:
[0084][0085]
其中,e、n、u分别对应东、北、天三个坐标方向。从而得到了定位定向结果。
[0086]
本发明还提供一种用于实现上述的基于短基线的定位定向方法的定位定向装置,所述定位定向装置包括双核处理器以及与双核处理器连接的第一天线和第二天线;所述双核处理器包括相连的第一核和第二核。
[0087]
综上所述,由于采用了上述技术方案,本发明的有益效果是:
[0088]
1、本技术的定位定向方法采用的定位定向装置是定位定向一体化的双分集接收装置,即通过双核处理器分别实现定位和定向功能,简化了设计结构,提升了数据处理的效率,降低了定位定向装置的成本和功耗。
[0089]
2、本技术提供的基于短基线的定位定向方法适用于固定短基线场景,可兼顾定向解算成功率和定向结果的准确度;同时采用正交投影法求解浮点解,能够有效减少大矩阵求逆和分离等运算引起的精度损失,提高数据精度。
附图说明
[0090]
为了更清楚地说明本发明实施例的技术方案,下面将对实施例中的附图作简单地介绍,应当理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
[0091]
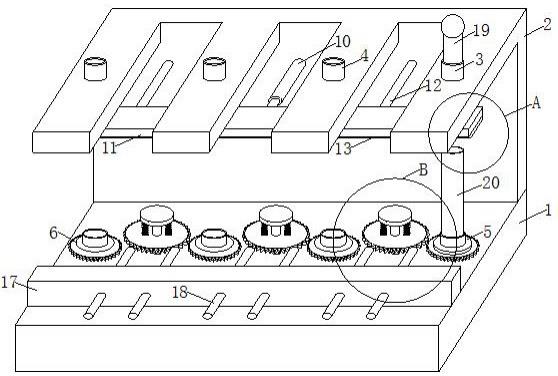
图1为本发明实施例中的定向定位装置的结构图。
[0092]
图2为本发明实施例中的定向原理的示意图。
[0093]
图3为本发明实施例中的定向的基线向量的示意图。
[0094]
图4为本发明实施例中的基于短基线的定位定向方法的流程图。
具体实施方式
[0095]
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本发明实施例的组件可以以各种不同的配置来布置和设计。
[0096]
因此,以下对在附图中提供的本发明的实施例的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0097]
实施例
[0098]
本实施例要实现一种基于短基线的定位定向方法,需要采用一种定位定向装置,如图1所示,所述定位定向装置是一个双分集接收装置,包括双核处理器以及与双核处理器连接的第一天线和第二天线;所述双核处理器包括相连的第一核和第二核。其工作原理为:
[0099]
双核处理器的第一核通过第一天线和第二天线接收卫星信号,如图2所示,实现对卫星信号的捕获与跟踪,能够得到定位信息、卫星位置、卫星的伪距观测值和载波相位观测值。
[0100]
双核处理器的第一核与第二核通过共享地址空间实现数据共享,第二核采用第一核获得的定位信息、卫星位置、卫星的伪距观测值和载波相位观测值进行定向解算,得到由
第一天线指向第二天线的基线向量。
[0101]
定向的最终目的是得到方向信息,一般指基线向量的航向角,如图3所示,基线向量由第一天线的位置a指向第二天线的位置b,航向角为东北天坐标系中的角度α。
[0102]
在具体应用中,定位定向装置还应包括射频模块、电源模块、时钟模块等(图中未示出)。所述射频模块处理用于将第一天线和第二天线接收到的卫星信号,转化为基带信号提供给双核处理器;所述电源模块用于为射频模块、双核处理器和时钟模块供电;所述时钟模块用于为双核处理器提供时钟信号。
[0103]
在准备好定位定向装置后,如图4所示,本实施例实现的一种基于短基线的定位定向方法,包括如下步骤:
[0104]
s100、定位定向装置的双核处理器的第一核,通过第一天线获得第一伪距观测值和第一载波相位观测值,并通过第二天线获得第二伪距观测值和第二载波相位观测值;同时,第一核经过处理得到站星距的单位化视向矢量;然后将第一伪距观测值和第一载波相位观测值,第二伪距观测值和第二载波相位观测值,以及站星距的单位化视向矢量写入第一核和第二核的共享地址空间;
[0105]
具体地:
[0106]
s101、双核处理器的第一核通过捕获和跟踪第一天线的卫星信号,获得第一伪距观测值和第一载波相位观测值,并通过捕获和跟踪第二天线的卫星信号,获得第二伪距观测值和第二载波相位观测值;
[0107]
s102、第一核采用单点定位方法得到第一天线的定位结果,利用卫星信号星历计算卫星位置,得到站星距(定位定向装置到卫星)的单位化视向矢量,表示为:
[0108][0109]
其中,为使模型更具普遍适用性,本实施例引入星座的标识,用欧冠符号g表示星座的标识,代表gps、bd2等卫星导航系统;符号k表示卫星,频率用li区别;
[0110]
s103、第一核将第一伪距观测值和第一载波相位观测值,第二伪距观测值和第二载波相位观测值,以及站星距的单位化视向矢量写入第一核和第二核的共享地址空间。
[0111]
s200、第二核从共享地址空间读取第一伪距观测值和第一载波相位观测值,第二伪距观测值和第二载波相位观测值,以及站星距的单位化视向矢量,建立定向gnss数学模型,并求解双差载波相位整周模糊度的浮点解及其协方差矩阵;
[0112]
具体地:
[0113]
s201、第二核从共享地址空间读取第一伪距观测值和第一载波相位观测值,第二伪距观测值和第二载波相位观测值,以及站星距的单位化视向矢量;
[0114]
s202、在第二核中建立定向gnss数学模型;
[0115]
具体地,所述定向gnss数学模型用线性观测方程的方式表述,对于任意频率任意星座的gnss系统都适用,其本质是一种整数参数和实数参数的混合模型,表述为:
[0116]
e(y)=aa bb,d(y)=qy,a∈zn,b∈r3[0117]
其中:y是观测向量;a是整周模糊度向量,属于n维整数向量zn;b是当地水平坐标系下的基线向量,属于3维实数向量r3;a是整周模糊度向量a的设计矩阵;b是基线向量b的设计矩阵;qy是观测向量y的方差协方差矩阵,反应其统计特性;e(
·
)代表期望算子;d(
·
)
代表方差算子。
[0118]
s203、利用读取的第一伪距观测值和第一载波相位观测值,第二伪距观测值和第二载波相位观测值,以及站星距的单位化视向矢量,并基于定向gnss数学模型,建立单历元双差模型;
[0119]
具体地:
[0120]
s2031、单差:
[0121]
对于第一伪距观测值和第一载波相位观测值以及第二伪距观测值和第二载波相位观测值,假设对于gnss星座g有mg颗可见星,在其li频率上的原始载波相位测量方差为原始伪距测量方差为将这mg颗可见星的单差载波相位观测方程和单差伪距观测方程分别联立,整理成单差矩阵方程:
[0122][0123][0124]
其中,表示星座g的li频率上的单差载波相位观测向量,单位为周;表示星座g的li频率上的单差伪距观测向量,单位为周;eg表示星座g的所有可见星的单位化视向矢量矩阵,维数为mg×
3;表示星座g的li频率上的单差载波相位观测向量的噪声;表示星座g的li频率上的单差伪距观测向量的噪声;表示星座g的li频率上的单差载波相位的整周模糊度向量;τ=c(δt
a-δtb)表示两个接收装置的钟差,单位为米;表示一个列向量,其元素全部为1,维数为mg;表示维数为mg的单位矩阵;
[0125]
上述向量和矩阵的具体结构表示如下:
[0126][0127][0128]
其中,表示星座g的li频率上的卫星k在第一天线的位置a与第二天线的位置b之间的单差载波相位观测量;表示星座g的li频率上的卫星k在第一天线的位置a与
第二天线的位置b之间的单差伪距观测量;表示星座g的li频率上的卫星k在第一天线的位置a与第二天线的位置b之间的单差载波相位的整周模糊度;表示星座g的li频率上的卫星k在第一天线的位置a与第二天线的位置b之间的单差载波相位观测量的噪声;表示星座g的li频率上的卫星k在第一天线的位置a与第二天线的位置b之间的单差伪距观测量的噪声;卫星符号k=1、2
…
mg。
[0129]
s2032,双差:
[0130]
指定某颗星作为参考星(可将参考星的单差观测方程放在矩阵方程中的第一个),用其它卫星的单差观测方程与其作差,则对于星座g的mg颗卫星得到(m
g-1)个双差方程;定义双差算子:
[0131][0132]
在单差矩阵方程的左右同时左乘双差算子,得到双差矩阵方程:
[0133][0134][0135]
将双差矩阵方程进一步写成如下形式:
[0136][0137]
该形式与步骤s202中的定向gnss数学模型相统一,即:
[0138][0139]
其中:
[0140][0141][0142][0143][0144]
[0145]
其中,符号表示克罗内克积运算。
[0146]
s204、基于单历元双差模型,采用正交投影法求解双差载波相位整周模糊度的浮点解及其协方差矩阵;
[0147]
具体地:
[0148]
设定是投影到设计矩阵b的子空间的正交投影算子:
[0149][0150][0151]
再定义得到双差载波相位整周模糊度的浮点解及其协方差矩阵:
[0152][0153][0154]
基于整周模糊度的浮点解,得到基线向量的条件解及其协方差矩阵:
[0155][0156][0157]
s300、根据双差载波相位整周模糊度的浮点解及其协方差矩阵,求解第一天线指向第二天线的基线向量的固定解;基于s2中得到的双差载波相位整周模糊度的浮点解及其协方差矩阵,可以采用lambda算法来实现整周模糊度的搜索,即,使以下目标函数最小的a作为双差整周模糊度向量的固定解
[0158][0159]
从而得到与该双差整周模糊度向量的固定解对应的基线向量的固定解
[0160]
具体地:
[0161]
s301、双差整周模糊度去相关;
[0162]
去相关过程即对双差整周模糊度向量的浮点解进行z变换:
[0163][0164][0165]
其中,和表示z变换后的双差整周模糊度向量的浮点解及其协方差矩阵,z表示z变换矩阵;z矩阵及其转置的作用是对搜索空间进行不同方向的挤压,使搜索空间由拉长的高维椭球变得近似于球。
[0166]
s302、离散搜索;
[0167]
经过步骤s301中z变换后,搜索空间是一个多维的超椭球体,中心在χ2和分别控制这个多维的超椭球体的大小和形状:
[0168]
[0169]
对进行l
t
dl分解,然后确定搜索空间χ2,以序贯条件最小二乘搜索得到候选向量解,也即双差整周模糊度向量的浮点解
[0170]
s303、模糊度确认;
[0171]
将步骤s302中得到的候选向量进行逆z变换,并进行模糊度确认;用候选向量解去修正基线向量的浮点解可得:
[0172][0173]
最小二乘估计的残差:
[0174][0175]
选取候选向量解中残差最小的候选向量解作为最终的双差整周模糊度向量的固定解从而双差整周模糊度向量的固定解对应的基线向量的固定解
[0176]
s400、基于第一天线指向第二天线的基线向量的固定解,求解航向角,得出定位定向结果;
[0177]
具体地:
[0178]
s401、以第一天线的位置a为坐标原点建立东北天坐标系,如图3所示,第二天线位于位置b处,b’为位置b在东北天坐标系的xoy平面内的投影,则基线向量在xoy平面内的投影与北向的夹角α称为载体的航向角,而与xoy平面的夹角β称为载体的俯仰角。
[0179]
s402、将第一天线与第二天线构成的基线向量即为基线向量的固定解记为则定向解算的航向角:
[0180][0181]
其中,e、n、u分别对应东、北、天三个坐标方向。从而得到了定位定向结果。
[0182]
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。