技术特征:
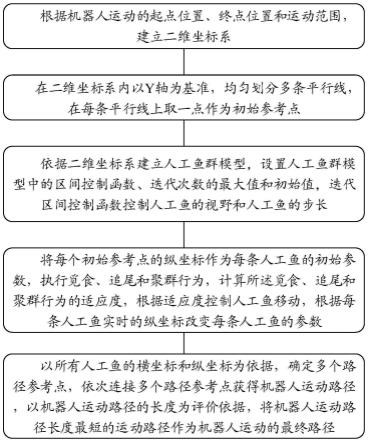
1.一种采用人工鱼群模型的机器人路径规划方法,其特征在于,包括以下步骤:根据机器人运动的起点位置、终点位置和运动范围,建立二维坐标系;在二维坐标系内以y轴为基准,均匀划分多条平行线,在每条平行线上取一点作为初始参考点;依据二维坐标系建立人工鱼群模型,设置人工鱼群模型中的区间控制函数f()、迭代次数的最大值max_gen和初始值,迭代区间控制函数f()控制人工鱼的视野和人工鱼的步长;将每个初始参考点的纵坐标作为每条人工鱼的初始参数,执行觅食、追尾和聚群行为,计算所述觅食、追尾和聚群行为的适应度,根据适应度控制人工鱼移动,根据每条人工鱼实时的纵坐标改变每条人工鱼的参数;以所有人工鱼的横坐标和纵坐标为依据,确定多个路径参考点,依次连接多个路径参考点获得机器人运动路径,以机器人运动路径的长度为评价依据,将机器人运动路径长度最短的运动路径作为机器人运动的最终路径。2.根据权利要求1所述的采用人工鱼群模型的机器人路径规划方法,其特征在于,所述区间控制函数f()控制人工鱼的视野和人工鱼的步长的具体步骤包括:给人工鱼的视野和步长赋相同的初始值initial;各条人工鱼分别执行觅食、追尾、聚群和随机行为,比较各种行为执行后的适应度,执行最高适应度对应的行为;在最高适应度对应的行为下,直至人工鱼个体适应度满足公告牌更新条件,将该条件下人工鱼的视野和步长作为最终人工鱼的视野和步长adap;否则重复对人工鱼的视野和步长的操作。3.根据权利要求2所述的采用人工鱼群模型的机器人路径规划方法,其特征在于,所述区间控制函数f()每次迭代后的函数值均小于迭代前的函数值。4.根据权利要求2所述的采用人工鱼群模型的机器人路径规划方法,其特征在于,所述最终人工鱼的视野和步长adap的确定包括:利用下式计算人工的鱼视野和人工鱼的步长的终值adap,adap=initial*f(iter)其中,iter为当前的迭代次数。5.根据权利要求2所述的采用人工鱼群模型的机器人路径规划方法,其特征在于,所述区间控制函数f()为幂函数型区间控制函数,f(iter)=k*iter
b
式中,k=max_y幂函数型区间控制函数的具体表达式如下,其中,iter为当前的迭代次数;max_y为所述区间控制函数f()初次迭代后的函数值;
min_y为所述区间控制函数f()在当前的迭代次数下最后一次迭代后的函数值。6.根据权利要求2所述的采用人工鱼群模型的机器人路径规划方法,其特征在于,所述区间控制函数f()为线性函数型区间控制函数,f(iter)=k*iter b式中,式中,线性函数型区间控制函数的具体表达式如下,其中,iter为当前的迭代次数;max_y为所述区间控制函数f()初次迭代后的函数值;min_y为所述区间控制函数f()在当前的迭代次数下最后一次迭代后的函数值。7.根据权利要求2所述的采用人工鱼群模型的机器人路径规划方法,其特征在于,所述区间控制函数f()为指数函数型区间控制函数,f(iter)=k*b
iter
式中,中,指数函数型区间控制函数的具体表达式如下,其中,iter为当前的迭代次数;max_y为所述区间控制函数f()初次迭代后的函数值;min_y为所述区间控制函数f()在当前的迭代次数下最后一次迭代后的函数值。8.根据权利要求1所述的采用人工鱼群模型的机器人路径规划方法,其特征在于,依据下式获得机器人运动路径长度:式中,x
i
=x
s
i*(x
t-x
s
)式中,(x
s
,y
s
)为机器人运动的起点坐标,(x
t
,y
t
)为机器人运动的终点坐标,y
i
为第i条
人工鱼的纵坐标,(x
i
,y
i
)为第i个路径参考点的二维坐标。9.根据权利要求1所述的采用人工鱼群模型的机器人路径规划方法,其特征在于,还包括:在人工鱼移动过程中,每移动一次,对人工鱼二维坐标进行检测,若超出二维坐标系的运动范围,则令该人工鱼二维坐标为运动范围的边界值。10.根据权利要求1所述的采用人工鱼群模型的机器人路径规划方法,其特征在于,还包括:将二维坐标系内的区域划分为可移动区域和不可移动区域;在人工鱼移动过程中,每移动一次,对人工鱼二维坐标进行检测,直至任意相邻的两条人工鱼的二维坐标的连线位于可移动区域内,否则,重复更新人工鱼的位置。
技术总结
本发明提供了一种采用人工鱼群模型的机器人路径规划方法,属于机器人应用技术领域,本发明通过对人工鱼视野和步长的变化区间进行设置,限定整个算法执行过程中人工鱼视野和步长的变化范围,且不受算法迭代次数的影响,实现了人工鱼视野和步长在可调区间内按照设定的精确变化范围进行改进,提高了机器人路径规划的精确度。规划的精确度。规划的精确度。
技术研发人员:姚正华
受保护的技术使用者:长江师范学院
技术研发日:2022.04.20
技术公布日:2022/7/12
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。