1.本实用新型涉及展示机器人模型技术领域,具体地,涉及一种机器人模型变脸装置。
背景技术:
2.在机器人模型展示技术领域,为增加视觉效果,通常会在机器人模型的四肢或者头部增加动态效果,而动态效果的实现通常依赖与电机和设置在模型内部的传动组件,在电机驱动旋转轴转动的转动过程中存在转动角度的精确度低,且转动轴由于旋转惯性造成的展示效果差的问题。
技术实现要素:
3.为解决上述问题的至少一个方面,本实用新型提供一种机器人模型变脸装置,包括:旋转支撑轴;头部安装板,所述头部安装板与所述旋转支撑轴的顶端固定连接,所述头部安装板上分离设置有至少两个脸部;第一轴承支撑板,所述第一轴承支撑板设置在所述头部安装板的下方,并且所述第一轴承支撑板设置有第一轴承,所述第一轴承与所述旋转支撑轴套接;第二轴承支撑板,所述第二轴承支撑板设置在所述第一轴承支撑板的下方,所述第二轴承支撑板设置有第二轴承,所述第二轴承与所述旋转支撑轴套接;固定板,所述固定板的两端分别与所述第一轴承支撑板和所述第二轴承支撑板固定连接,所述固定板与机器人模型本体连接;电机,所述电机设置在所述第二轴承支撑板的底部,所述电机转子与所述旋转支撑轴驱动连接;控制器,所述控制器与所述电机通信连接,所述控制器用于控制所述电机的启动或关闭。
4.优选地,还包括感应装置,所述感应装置与所述控制器通信连接,所述头部安装板上设置有金属顶丝,所述感应装置基于所述金属顶丝发送感应信号,所述控制器接收所述感应信号,并基于所述感应信号控制所述电机的启动或关闭。
5.优选地,所述固定板包括第一固定板和第二固定板,所述第一固定板和所述第二固定板对称设置在所述旋转支撑轴的两侧,所述第一固定板分别与所述第一轴承支撑板和所述第二轴承支撑板固定连接,所述第二固定板分别与所述第一轴承支撑板和所述第二轴承支撑板固定连接。
6.优选地,还包括紧固板,所述紧固板与所述第一固定板固定连接,所述第一固定板通过所述紧固板与机器人模型本体固定连接。
7.优选地,还包括第三轴承支撑板,所述第三轴承支撑板设置在所述第一轴承支撑板和所述第二轴承支撑板之间,所述第三轴承支撑板上设置有第三轴承,所述第三轴承与所述旋转支撑轴套接,所述第一固定板和所述第二固定板分别与所述第三轴承支撑板固定连接。
8.优选地,还包括旋转轴调节螺栓,所述旋转轴调节螺栓用于固定所述电机的转子和所述旋转支撑轴。
9.优选地,还包括限位顶丝,所述限位顶丝设置所述第一轴承支撑板上,所述限位顶丝的一端抵靠所述旋转支撑轴的侧壁。
10.优选地,所述第二轴承支撑板的一侧开设有与所述第二轴承所在通孔连通的凹槽。
11.优选地,还包括顶部安装板,所述顶部安装板固定设置在所述旋转支撑轴的顶部,所述头部安装板固定设置在所述顶部安装板上。
12.本实用新型的机器人模型变脸装置具有以下有益效果:通过控制器结合电机对旋转支撑轴进行驱动控制,从而实现机器人模型的变脸展示;通过感应装置与控制器的通信连接实现对转动的精确控制,提高变脸展示效果。
附图说明
13.为了更好地理解本实用新型的上述及其他目的、特征、优点和功能,可以参考附图中所示的实施方式。附图中相同的附图标记指代相同的部件。本领域技术人员应该理解,附图旨在示意性地阐明本实用新型的优选实施方式,对本实用新型的范围没有任何限制作用,图中各个部件并非按比例绘制。
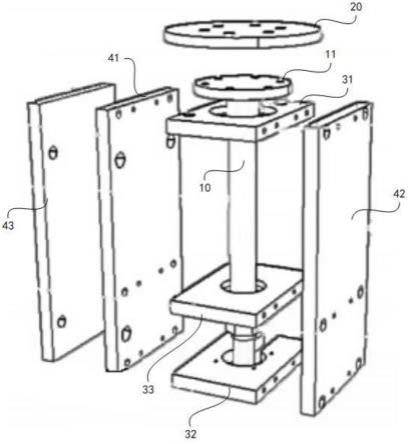
14.图1示出了根据本实用新型实施例的机器人模型变脸装置的旋转支撑轴、头部安装板、固定板、轴承支撑板结构示意图。
15.附图标记说明:
16.10、旋转支撑轴;11、顶部安装板;20、头部安装板;31、第一轴承支撑板;32、第二轴承支撑板;33、第三轴承支撑板;41、第一固定板;42、第二固定板;43、紧固板。
具体实施方式
17.以下结合附图对本公开的示范性实施例做出说明,其中包括本公开实施例的各种细节以助于理解,应当将它们认为仅仅是示范性的。因此,本领域普通技术人员应当认识到,可以对这里描述的实施例做出各种改变和修改,而不会背离本公开的范围和精神。同样,为了清楚和简明,以下的描述中省略了对公知功能和结构的描述。
18.在本文中使用的术语“包括”及其变形表示开放性包括,即“包括但不限于”。除非特别申明,术语“或”表示“和/或”。术语“基于”表示“至少部分地基于”。术语“一个示例实施例”和“一个实施例”表示“至少一个示例实施例”。术语“另一实施例”表示“至少一个另外的实施例”。术语“第一”、“第二”等等可以指代不同的或相同的对象。下文还可能包括其他明确的和隐含的定义。
19.为了至少部分地解决上述问题以及其他潜在问题中的一个或者多个,本公开的一个实施例提出了一种机器人模型变脸装置,包括:旋转支撑轴10;头部安装板20,头部安装板20与旋转支撑轴10的顶端固定连接,头部安装板20上分离设置有至少两个脸部;第一轴承支撑板31,第一轴承支撑板31设置在头部安装板20的下方,并且第一轴承支撑板31设置有第一轴承,第一轴承与旋转支撑轴10套接;第二轴承支撑板32,第二轴承支撑板32设置在第一轴承支撑板31的下方,第二轴承支撑板32设置有第二轴承,第二轴承与旋转支撑轴10套接;固定板,固定板的两端分别与第一轴承支撑板31和第二轴承支撑板32固定连接,固定板与机器人模型本体连接;电机,电机设置在第二轴承支撑板32的底部,电机转子与旋转支
撑轴10驱动连接;控制器,控制器与电机通信连接,控制器用于控制电机的启动或关闭。
20.具体地,如图1所示,旋转支撑轴10采用圆柱体结构,其顶部固定设置头部安装板20,头部安装板20采用圆盘结构,头部安装板20的下表面与旋转支撑轴10的顶端固定连接,头部安装板20用于安装机器人模型的不同脸部组件。在一些实施例中,机器人模型变脸装置包括第一脸部组件和第二脸部组件,第一脸部组件和第二脸部组件分别固定连接在头部安装板20的两侧,并关于头部安装板20的圆心对称,当头部安装板20对旋转支撑抽10转动时,第一脸部组件和第二脸部组件交替展示在固定的视线界面,从而实现机器人模型的变脸展示。第一轴承支撑板31和第二轴承支撑板32采用矩形结构,分别平行于与头部安装板20设置,第一轴承支撑板31和第二轴承支撑板32分别设置在旋转支撑轴10的上半部和下半部,第一轴承和第二轴承共轴设置,且分别与旋转支撑轴10套接,以增加旋转支撑轴10的稳定性。电机设置在第二轴承支撑板32的下方,电机的转子与旋转支撑轴10的底部固定连接。并通过控制器与电机的通信连接实现对电机的启动或关闭的控制,从而实现对头部安装板20的转动控制。
21.在一些实施例中,还包括感应装置,感应装置与控制器通信连接,头部安装板20上设置有金属顶丝,感应装置基于金属顶丝发送感应信号,控制器接收感应信号,并基于感应信号控制电机的启动或关闭。本领域技术人员可以理解地,控制器对电机的控制还包括调节电机的转子转动方向,电机的转子转动方向包括顺时针旋转和逆时针旋转。
22.具体地,感应装置采用金属感应器,感应装置固定设置在第一轴承支撑板31上,头部安装板20上设置有与第一脸部组件和第二脸部组件对应的金属顶丝,例如,在第一面部组件和第二面部组件的交界处分别设置第一定位顶丝和第二定位顶丝,电机接收控制器指令启动,并驱动旋转支撑轴10转动,第一定位顶丝和第二定位顶丝随头部安装板20在旋转支撑轴10的带动下转动,感应装置感应到金属顶丝后发送信号至控制器,控制器基于接收的信号关闭电机,使旋转支撑轴10停止转动,完成换脸。
23.在另外的实施例中,本领域技术人员可以理解地,还可以包括三个脸部,第一脸部组件、第二脸部组件和第三脸部组件依次沿头部安装板20的周向设置,响应的在相邻的脸部组件交界处设置定位顶丝,控制器基于金属感应装置基于定位顶丝发出的信号控制电机的关闭,从而实现机器人模型的换脸展示。
24.在一些实施例中,固定板包括第一固定板41和第二固定板42,第一固定板41和第二固定板42对称设置在旋转支撑轴10的两侧,第一固定板41分别与第一轴承支撑板31和第二轴承支撑板32固定连接,第二固定板42分别与第一轴承支撑板31和第二轴承支撑板32固定连接。
25.具体地,如图1所示,固定板的第一固定板41和第二固定板42采用矩形板结构,第一固定板41垂直于第一轴承支撑板31和第二轴承支撑板32固定连接,第二固定板42垂直于第一轴承支撑板31和第二轴承支撑板32固定连接。通过第一固定板41和第二固定板42实现对第一轴承支撑板31和第二轴承支撑板32的相对位置的固定连接,增加稳定性。
26.在另外的实施例中,固定板还可以包括多个条形杆,多个条线杆的两端分别与第一轴承支撑板31和第二轴承支撑板32固定连接,以可以实现对其相对位置的稳定支撑即可。
27.在一些实施例中,还包括紧固板43,紧固板43与第一固定板41固定连接,第一固定
板41通过紧固板43与机器人模型本体固定连接。
28.具体地,如图1所示,紧固板43采用与第一固定板41相同的矩形平板结构,且紧固板43与第一固定板41平行固定设置,并通过连接件紧密连接,紧固板43与机器人模型本体固定连接,以实现机器人模型变脸装置与机器人本体的固定连接。
29.在一些实施例中,还包括第三轴承支撑板33,第三轴承支撑板33设置在第一轴承支撑板31和第二轴承支撑板32之间,第三轴承支撑板33上设置有第三轴承,第三轴承与旋转支撑轴10套接,第一固定板41和第二固定板42分别与第三轴承支撑板33固定连接。
30.具体地,如图1所示,第三轴承支撑板33采用与第一轴承支撑板31和第二轴承支撑板32相同的矩形平板结构,并且平行设置在第一轴承支撑板31和第二轴承支撑板32之间,第三轴承与第一轴承和第二轴承共轴设置。以增加旋转支撑轴10在转动过程中的稳定性。
31.在一些实施例中,还包括旋转轴调节螺栓,旋转轴调节螺栓用于固定电机的转子和旋转支撑轴10。
32.具体地,旋转轴调节螺栓设置在旋转支撑轴10底部与电机的转子连接处,通过调节旋转轴调节螺栓实现对旋转支撑轴10的位置的调节。
33.在一些实施例中,还包括限位顶丝,限位顶丝设置第一轴承支撑板31上,限位顶丝的一端通过抵靠旋转支撑轴10的侧壁。
34.具体地,限位顶丝设置在第一轴承支撑板31的侧壁上,该侧壁位于第一固定板41和第二固定板42连接的侧壁之间,旋转支撑轴10的侧壁上设置有挡块,通过限位顶丝与挡块的配合实现对旋转支撑轴10的转动限制,降低转动惯性的影响。
35.在一些实施例中,第二轴承支撑板32的一侧开设有与第二轴承所在通孔连通的凹槽。通过开设凹槽实现对电机转子与旋转支撑轴10的连接件的调节。
36.在一些实施例中,还包括顶部安装板11,顶部安装板11固定设置在旋转支撑轴10的顶部,头部安装板20固定设置在顶部安装板11上。
37.具体地,如图1所示,顶部安装板11采用圆盘结构,顶部安装板11垂直于旋转支撑轴10的轴线且平行于头部安装板20设置,顶部安装板11的直径小于头部安装板20,通过顶部安装板11增加头部安装板20的稳定性。
38.以上已经描述了本公开的各实施例,上述说明是示例性的,并非穷尽性的,并且也不限于所披露的各实施例。在不偏离所说明的各实施例的范围和精神的情况下,对于本技术领域的普通技术人员来说许多修改和变更都是显而易见的。本文中所用术语的选择,旨在最好地解释各实施例的原理、实际应用或对市场中的技术改进,或者使本技术领域的其它普通技术人员能理解本文。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。