1.本实用新型涉及注射器输送技术领域,具体为一种注射器无碰撞输送装置。
背景技术:
2.注射器是一种常见的医疗用具,用针头抽取、注入气体或液体的这个过程叫作注射,注射器由前端带有小孔的针筒以及与之匹配的活塞芯杆组成,用来将少量的液体或其注入到其它方法无法接近的区域或者从那些地方抽出,在芯杆拔出的时候液体或者气体从针筒前端小孔吸入,在芯杆推入时将液体或者气体挤出。
3.常规的注射器输送,注射器之间互相碰撞,注射器内液体在这种工况下产生气泡,影响视觉检测,此外注射器之间互相碰撞,加大了注射器法兰破碎、瓶身裂纹等风险。
技术实现要素:
4.本实用新型的目的在于提供一种注射器无碰撞输送装置,避免注射器之间互相碰撞。
5.实现上述目的的技术方案是:
6.一种注射器无碰撞输送装置,包括安装在并联机器人上的柔性夹爪,还包括脱巢机构,
7.所述脱巢机构包括:第一磁导轨、多个第一可移动夹持载具机构、脱巢螺杆护栏和脱巢螺杆,其中,
8.所述第一磁导轨沿竖直面上设有环形轨道,所述第一可移动夹持载具机构由所述第一磁导轨驱动沿环形轨道运动;
9.所述柔性夹爪将巢板中注射器抓取到所述第一可移动夹持载具机构;
10.所述脱巢螺杆护栏和脱巢螺杆相对平行设置,中间形成第一直线通道;
11.所述脱巢螺杆首端设有使得所述第一可移动夹持载具机构上注射器进入所述脱巢螺杆中的脱巢工位,该脱巢工位连通第一直线通道。
12.优选的,还包括回巢机构,
13.所述回巢机构包括:第二磁导轨、多个第二可移动夹持载具机构、回巢螺杆护栏、回巢主螺杆、回巢副螺杆、第一伺服电机、第二伺服电机、第一同步带和第二同步带,其中,
14.所述第一伺服电机通过所述第一同步带驱动所述回巢主螺杆的首端转动;
15.所述第二伺服电机通过所述第二同步带驱动所述回巢副螺杆的尾端转动;
16.所述回巢主螺杆尾端的中心轴与所述回巢副螺杆首端的中心轴并列同轴;
17.所述回巢主螺杆和回巢副螺杆形成的整体螺杆与所述回巢螺杆护栏之间形成第二直线通道;
18.所述回巢副螺杆的尾端设有使得所述回巢副螺杆上注射器进入到所述第二可移动夹持载具机构中的回巢工位,该回巢工位连通第二直线通道;
19.所述第二磁导轨沿竖直面上设有环形轨道,所述第二可移动夹持载具机构由所述
第二磁导轨驱动沿环形轨道运动;
20.所述柔性夹爪将所述第二可移动夹持载具机构上注射器抓取到巢板中。
21.优选的,所述第一可移动夹持载具机构和第二可移动夹持载具机构结构相同,均包括:
22.由所述第一磁导轨或第二磁导轨驱动的动子;
23.连接在所述动子上,设有用于放置注射器的孔槽的夹持载具。
24.优选的,所述回巢主螺杆和回巢副螺杆的转向、外直径均相同。
25.本实用新型的有益效果是:本实用新型通过可移动夹持载具机构、脱巢螺杆以及回巢螺杆的结构,每个注射器都被载具中的孔槽或者螺杆的槽和护栏之间的空间约束,注射器法兰边搭在护栏上,注射器不能自由移动,实现注射器之间无碰撞目标。
附图说明
26.图1是本实用新型的注射器无碰撞输送装置的脱巢机构轴测图;
27.图2是本实用新型的注射器无碰撞输送装置的回巢机构轴侧图;
28.图3为本实用新型中夹持载具和磁导轨及其动子装配示意图;
29.图4为本实用新型中夹持载具与脱巢螺杆交接示意图;
30.图5为本实用新型中回巢主副螺杆主视图。
具体实施方式
31.下面将结合附图对本实用新型作进一步说明。
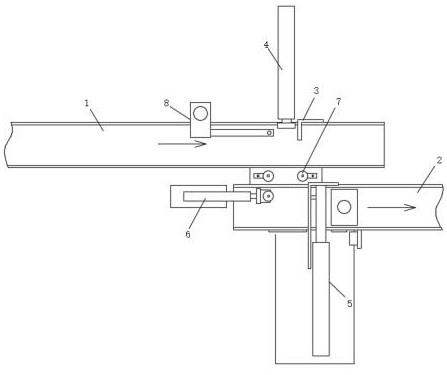
32.请参阅图1-5,本实用新型的注射器无碰撞输送装置,包括安装在并联机器人2上的柔性夹爪3、脱巢机构和回巢机构。
33.脱巢机构包括:第一磁导轨4、多个第一可移动夹持载具机构5、脱巢螺杆护栏41和脱巢螺杆6。
34.第一磁导轨4沿竖直面上设有环形轨道,第一可移动夹持载具机构5由第一磁导轨4驱动沿环形轨道运动。柔性夹爪3将巢板1中注射器抓取到第一可移动夹持载具机构5。第一可移动夹持载具机构5包括:由第一磁导轨4驱动的动子31;连接在动子31上,设有用于放置注射器的孔槽的夹持载具32。
35.脱巢螺杆护栏41和脱巢螺杆6相对平行设置,中间形成第一直线通道。
36.脱巢螺杆6首端设有使得第一可移动夹持载具机构5上注射器进入脱巢螺杆6中的脱巢工位,该脱巢工位连通第一直线通道。如此,第一可移动夹持载具机构5中的注射器在第一磁导轨4的驱动下,沿着脱巢螺杆护栏41的方向,快速移动到脱巢螺杆6的脱巢工位,注射器在脱巢螺杆6处交接,从夹持载具32进入到脱巢螺杆6中,再由脱巢螺杆护栏41与脱巢螺杆6引导进入脱巢机构和回巢机构之间的中道工序8。每个注射器都被夹持载具32中的孔槽或者脱巢螺杆6的槽和脱巢螺杆护栏41之间的空间约束,注射器法兰边搭在脱巢螺杆护栏41上,注射器不能自由移动,实现注射器之间无碰撞目标。
37.如图3、4,三个第一可移动夹持载具机构5分别设为:可移动夹持载具机构5-1、可移动夹持载具机构5-2和可移动夹持载具机构5-3。在抓取工位等待,柔性夹爪3将注射器放入可移动夹持载具机构5-1中,并联机器人2的柔性夹爪3打开,然后第一磁导轨4控制可移
动夹持载具机构5-1加速,在与脱巢螺杆6交接处减速,保持与脱巢螺杆6同步,直到注射器全部进入脱巢螺杆6与脱巢螺杆护栏41之间,然后加速,从第一磁导轨4下部绕回到等待抓取工位。当可移动夹持载具机构5-1开始减速同步时,可移动夹持载具机构5-2在抓取工位等待柔性夹爪3将注射器放入,当可移动夹持载具机构5-1中的注射器全部进入脱巢螺杆6,可移动夹持载具机构5-2与脱巢螺杆6同速,且在可移动夹持载具机构5-2后,可移动夹持载具机构5-3位于抓取工位等待。多个可移动夹持载具机构5依次与脱巢螺杆6相交接,使并联机器人的间隙供料转变为连续供料。相应地,回巢与其相反。
38.回巢机构包括:第二磁导轨4’、多个第二可移动夹持载具机构5’、回巢螺杆护栏、回巢主螺杆51、回巢副螺杆52、第一伺服电机53、第二伺服电机54、第一同步带55和第二同步带56。第二可移动夹持载具机构5’与第一可移动夹持载具机构5结构相同。
39.第一伺服电机53通过第一同步带55驱动回巢主螺杆51的首端转动;第二伺服电机54通过第二同步带56驱动回巢副螺杆52的尾端转动。
40.回巢主螺杆51尾端的中心轴与回巢副螺杆52首端的中心轴并列同轴,回巢主螺杆51和回巢副螺杆52的转向、外直径均相同。
41.回巢主螺杆51和回巢副螺杆52形成的整体螺杆与回巢螺杆护栏之间形成第二直线通道。回巢副螺杆52的尾端设有使得回巢副螺杆52上注射器进入到第二可移动夹持载具机构5’中的回巢工位,该回巢工位连通第二直线通道。
42.第二磁导轨4’沿竖直面上设有环形轨道,第二可移动夹持载具机构5’由第二磁导轨4’驱动沿环形轨道运动;柔性夹爪3将第二可移动夹持载具机构5’上注射器抓取到巢板1中。
43.当上游来料时缺料x个时,第一伺服电机53比第二伺服电机54加速x个螺距,使回巢副螺杆52的每个槽都有注射器,将上游来料缺少的注射器补满。
44.以上实施例仅供说明本实用新型之用,而非对本实用新型的限制,有关技术领域的技术人员,在不脱离本实用新型的精神和范围的情况下,还可以作出各种变换或变型,因此所有等同的技术方案也应该属于本实用新型的范畴,应由各权利要求所限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。