lidar发送器和具有弯曲激光布置的lidar系统及其制造方法
技术领域
1.本公开涉及lidar系统和方法,具体地但非排他地,涉及lidar发送器系统、lidar系统和用于发射lidar信号的方法。
背景技术:
2.lidar(光检测和测距)是测量到目标的距离的技术。用从lidar发送器系统发射的激光照射目标,并且用传感器或lidar接收器系统检测反射的激光。进行飞行时间测量以建立lidar系统与目标上的不同点之间的距离,以建立目标的三维表示。目标可以是lidar系统的视场中的一个对象、多个对象或整个场景。
3.在图1a中示出了已知的lidar发送器系统100的示例。已知的lidar发送器系统100包括激光源101,激光源101通过透镜103朝向lidar目标发射激光能量102。激光源101通常以有效焦距104定位在透镜的焦平面中。在现实世界设置中,透镜103不是完美的,因此导致通过它的激光能量的光学失真。
4.已知类型的光学像差是场曲(也称为petzval(佩兹伐)场曲)。场曲是在透镜、反射镜和其他光学组件中发生的光学像差,并且通常可以被描述为其中垂直于光轴的平坦对象(或超过超焦距的非平坦对象)不能适当地聚焦在平坦像平面(image plane)上的现象。而是,像差的影响是在像“平面”(即透镜的焦场)中引起弯曲。透镜、反射镜或其他光学组件的焦场中的该弯曲像“平面”或曲率被称为petzval表面。场曲的强度取决于距光轴的距离和光学系统的光学参数,例如透镜厚度。因此,在光轴处,影响可忽略不计,但随着距光轴的距离增加,影响增加。场曲像差可以被认为是对象的点到弯曲表面上而不是到平坦表面上的映射。
5.在图1a的已知lidar发送器系统100中,透镜103引起场曲,该场曲通过在距透镜距离106处给予理想的平坦像平面105一曲率来使理想的平坦像平面105失真。如上所述,弯曲的像“平面”107被称为petzval表面。该弯曲表面107上的所有点都对焦,而不在该表面107上的任何点都不对焦。
6.来自图1a中的lidar发送器系统100的五个说明性光线路径在五个不同点108a、108b、108c、108d、108e处与理想的平坦像平面105相交。点中的一个108a在光轴处与理想的平坦像平面105相交,因此场曲是可忽略的(换句话说,理想的平坦像平面105和petzval表面107共享它们与光轴相交的公共点)。其他点108b、108c、108d、108e在距光轴一距离处与平坦像平面105相交,其中场曲的影响更大。这些点108b、108c、108d、108e因此不在petzval表面107上,因此不对焦。
7.图1b说明性地示出了图1a的lidar发送器系统100的侧视图。如上所述,由透镜引起的像差导致理想的平坦像平面105弯曲,所得到的表面107被称为petzval表面。因此,并非所有发射的激光能量都聚焦在理想的平坦像平面105处。而是,由lidar发送器发射的总激光能量的至少一部分在理想的平坦像平面105处失焦。因此,当lidar目标是对应于理想的平坦像平面的表面时,只有沿着光轴撞击lidar目标的激光能量束的部分对焦并且具有
带有最小光束发散度的理想光束强度。激光束的其余部分(特别是在光束的周边)失焦,因此具有较低的光束强度和较高的光束发散度。
8.lidar系统的有效范围部分地取决于撞击lidar目标的光束的强度。具体地,在lidar接收器系统处检测到的信号的强度通常至少需要撞击lidar目标的最小光束强度(即,强度必须足够高以使其反射在lidar接收器系统处被检测到)。上述场曲像差和光束周边处的光束强度的相应减小导致光束周边处的有效lidar范围的下降。
9.类似地,lidar目标处的光束发散度越大,lidar系统的分辨率越小。因此,由场曲像差引起的光束周边处的较大光束发散度使lidar系统对于光束周边中的lidar目标的分辨率变差。
10.例如,如果图1a的lidar系统100沿着光轴(即,沿着中心光线路径108a)的有效lidar范围和分辨率分别为60米和0.1度,则场曲像差可能导致在发射的激光能量(即,其他光线路径108b、108c、108d、108e)的周边处的有效lidar范围和分辨率为30米和0.4度。
11.当从lidar目标反射的能量通过相应的透镜进入并撞击lidar接收器系统200的光电检测器的阵列时,会对该能量产生对应的影响,如图2a和2b中说明性地示出的。在图2a的示例中,从与lidar发送器系统的理想的平坦像平面相对应的位置处的lidar目标205反射的能量202行进距离206到透镜203并通过透镜203,并且撞击lidar接收器系统200的光电检测器的阵列201。光电检测器通常布置在距透镜有效焦距204处的平坦表面上,并且对应于透镜203的理想的平坦像平面(即,焦平面)209。在图2a的示例中,反射能量的五个说明性光线路径208a、208b、208c、208d、208e被示出为撞击lidar接收器系统200的光电检测器的平坦平面。如图2b所示,透镜203的场曲像差使透镜203的理想的平坦像平面209失真为弯曲表面210(即petzval表面)。如上所述,仅弯曲表面210上的点对焦。因此,沿着光线路径208b、208c、208d、208e中的一些的反射能量在它们撞击布置在与透镜203的理想的平坦像平面209相对应的平坦表面上的光电检测器时不对焦。lidar接收器系统200处的这种场曲像差进一步减小了lidar系统的有效lidar范围和分辨率。
12.因此,本公开的目的是提供解决上述一个或多个问题或至少提供有用的替代方案的lidar发送器系统、lidar系统和方法。
技术实现要素:
13.通常,本公开提出通过使激光能量源布置在其上的表面弯曲以匹配由透镜引起的场曲来克服上述问题。这种布置补偿和/或完全抵消像差引起的透镜的像平面的弯曲。因此,激光能量在整个像平面中、而不仅仅是在沿着光轴的点处,对焦地撞击lidar目标。因此,当在lidar发送器系统中使用这种布置时,有效lidar范围和分辨率保持恒定,而与像平面中距lidar目标处的光轴的距离无关。因此,在输出激光能量发射的周边处的范围或分辨率没有下降,因为光束强度和发散度在距光轴的所有距离处是恒定的。
14.根据本公开的一个方面,提供了一种lidar发送器系统,包括:激光能量源的阵列,激光能量源布置在第一弯曲表面上并且被配置为朝向lidar目标发射激光能量;以及至少第一透镜,其布置在激光能量源的阵列和lidar目标之间的光路中,其中,第一弯曲表面位于第一透镜的像平面处。
15.可选地,第一弯曲表面的曲率可以遵循第一透镜的场曲。
16.可选地,第一透镜的场曲可以包括第一透镜的焦场中的曲率。
17.可选地,第一弯曲表面可以包括弯曲的晶圆。
18.可选地,激光能量源的阵列可以包括布置在弯曲晶圆中、弯曲晶圆上和/或与弯曲晶圆集成的垂直腔表面发射激光器(vcsel)的阵列。
19.可选地,弯曲晶圆可以包括固化的半导体晶圆。
20.可选地,第一弯曲表面的曲率可以遵循第一透镜的petzval表面。
21.可选地,第一弯曲表面的曲率可以包括球面曲率、椭圆曲率、抛物线曲率或双曲线曲率。
22.可选地,第一弯曲表面的曲率可以包括二维曲率。
23.可选地,第一弯曲表面的面向第一透镜的面可以是凹的。
24.可选地,激光能量源可以包括布置在第一弯曲表面上的边缘发射器、led和/或集成激光能量源。
25.根据本公开的第二方面,提供了一种lidar系统,该lidar系统包括上述任何方面和实施例的lidar发送器系统。
26.可选地,lidar接收器系统可以包括布置在第二弯曲表面上的光电检测器的阵列,光电检测器可以被配置为检测来自lidar目标的反射能量;以及第二透镜可以布置在lidar目标和光电探测器阵列之间的光路中,第二弯曲表面可以位于第二透镜的像平面处。
27.可选地,第二弯曲表面的曲率可以遵循第二透镜的场曲。
28.可选地,第二透镜的场曲可以包括第二透镜的焦场中的曲率。
29.可选地,第二弯曲表面可以包括弯曲晶圆,光电检测器的阵列布置在弯曲晶圆上,并且第二弯曲表面的曲率可以遵循第二透镜的petzval表面。
30.根据本公开的第三方面,提供了一种用于朝向lidar目标发射激光能量的方法,该方法包括:通过布置在激光能量源的阵列和lidar目标之间的光路中的第一透镜从激光能量源的阵列朝向lidar目标发射激光能量,其中激光能量源布置在第一弯曲表面上,第一弯曲表面位于第一透镜的像平面处。
31.可选地,第一弯曲表面的曲率可以遵循第一透镜的场曲。
32.可选地,第一透镜的场曲可以包括第一透镜的焦场中的曲率。
33.根据本公开的第四方面,提供了一种制造上述任何方面和实施例的lidar发送器系统的方法,该方法包括:测量第一透镜的场曲;将多个激光能量源作为阵列布置在平坦表面上;加热平坦表面以增加平坦表面的延展性;向平坦表面的预定区域施加压力以将平坦表面转换为弯曲表面,弯曲表面的曲率遵循第一透镜的场曲;冷却弯曲表面;以及将弯曲表面定位在第一透镜的像平面处。
34.可选地,第一透镜的场曲可以包括第一透镜的焦场中的曲率。
35.可选地,平坦表面可以包括平坦晶圆。
36.可选地,激光能量源的阵列可以包括垂直腔表面发射激光器(vcsel)的阵列。
附图说明
37.现在将仅通过示例并参考附图来描述本公开的一些实施例,其中:
38.图1a-1b说明性地示出了已知的lidar发送器系统。
39.图2a-2b说明性地示出了已知的lidar接收器。
40.图3a-3b说明性地示出了根据本公开的lidar发送器系统。
41.图4a-4b说明性地示出了根据本公开的lidar发送器系统。
42.图5说明性地示出了根据本公开的垂直腔表面发射激光器。
43.图6说明性地示出了根据本公开的lidar系统。
44.图7说明性地示出了根据本公开的lidar系统。
45.图8a-8b说明性地示出了根据本公开的lidar接收器。
46.图9说明性地示出了根据本公开的lidar系统。
47.图10说明性地示出了根据本公开的方法。
48.图11说明性地示出了根据本公开的方法。
具体实施方式
49.一般而言,本公开提供了布置在弯曲表面上并且被配置为朝向lidar目标发射激光能量的激光能量源的阵列。透镜布置在激光能量源的阵列和lidar目标之间的光路中。代替透镜,可以使用包括多个单独透镜的透镜系统,但是本公开同样适用于这种系统。其上布置有激光能量源的弯曲表面位于第一透镜的像平面处。弯曲表面的曲率遵循第一透镜的场曲。
50.在附图中给出了由本公开提供的解决方案的一些示例。
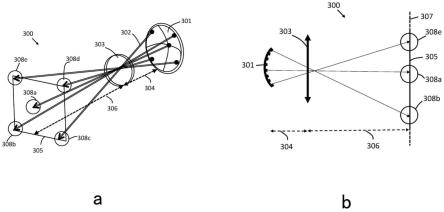
51.图3a和3b分别示出了lidar发送器系统300的图示,该lidar发送器系统300包括布置在第一弯曲表面301上的激光能量源的阵列。激光能量源被配置为朝向lidar目标发射激光能量302。第一透镜303布置在激光能量源的阵列和lidar目标之间的光路中,其可以位于例如距透镜距离306处。第一弯曲表面301位于第一透镜的像平面处,例如在距透镜303的第一有效焦距304处。当激光能量通过透镜时,透镜303引起场曲像差。因此,在lidar目标所在的距离306处,基于由透镜303引起的场曲影响的强度来改变透镜303的像“平面”的曲率。因此,场曲像差可以被认为是一个表面上的点到具有修改的曲率的另一表面上的对应点的映射。如上面关于图1和图2所述,如果起始表面是平坦的,则映射点限定由场曲像差的强度确定的弯曲表面。然而,相反地,如果第一表面具有对应于透镜的场曲的曲率,则映射点替代地限定平坦表面。换句话说,可以通过修改其上布置有lidar发送器的激光源的表面的曲率来平坦化petzval表面(即,所有点在其上对焦的表面)。
52.因此,通过将第一弯曲表面301的曲率配置为遵循第一透镜的场曲,场曲对有效lidar范围和分辨率的不利影响被补偿和/或完全抵消。
53.在图3a和3b的示例中,示出了从布置在弯曲表面301上的激光能量源的阵列发射、传播通过透镜303并撞击lidar目标的五个示例激光能量束。弯曲表面的曲率被配置为遵循透镜303的场曲,并且因此,该布置的petzval表面305(即,其中所有点对焦的场)被平坦化。因此,在距透镜303距离306处,当发射的激光能量在点308a、308b、308c、308d、308e处与petzval表面305相交时,所有发射的激光能量都对焦。换句话说,petzval表面现在对应于理想的平坦像平面307并与其对准,如图307所示。换句话说,由透镜的场曲像差和激光能量源布置在其上的弯曲表面的组合产生的焦场是平坦表面。
54.利用这种布置,位于距透镜303距离306处的lidar目标将在其整个可见表面上被
完全对焦的激光能量束照射,而不是被仅沿光轴对焦的激光能量束照射。从而解决了上述降低有效lidar范围和分辨率的问题。例如,如果图3a的lidar系统300沿着光轴(即,沿着中心光线路径308a)的有效lidar范围和分辨率分别为60米和0.1度,则弯曲表面301的曲率确保在发射的激光能量的周边(即,沿着其他光线路径308b、308c、308d、308e)的有效lidar范围和分辨率也为60米和0.1度。
55.图4a和4b示出了其上布置有激光能量源的阵列402的示例弯曲表面401a、401b。弯曲表面401a、401b可以用作图3a和3b所示的lidar发送器阵列300中的弯曲表面。
56.弯曲表面401a、401b的曲率被设想为在面向透镜的面上是凹的,并且可以包括例如球面曲率401a、抛物线曲率401b、椭圆曲率或双曲线曲率。曲率可以包括两个不同维度上的曲率,如图4a的示例中所示,或者可以包括仅一个维度上的曲率,如图4b中所示。可以设想,仅一个维度上的曲率可以用于仅确定单个平面中的范围的lidar应用中。例如,在自动驾驶车辆中的对象检测和碰撞避免中,仅车辆前方的单个水平平面中的对象可能是相关的。因此,在这样的lidar应用中,可能仅需要补偿水平维度中的场曲的影响。因此,其上布置有激光能量源的弯曲表面的曲率可以仅在对应的水平方向上。
57.图5示出了垂直腔表面发射激光器(vcsel)500的图示,其可以用作上面关于图3-4描述的激光能量源中的一个或多个。vcsel包括位于有源区502的任一侧上的多个分布式布拉格反射器(dbr)层501,有源区502例如包括一个或多个量子阱,用于激光能量产生和dbr层501之间的谐振。dbr层501和有源区502可以布置在基板503上,基板503继而可以不布置印刷电路板(pcb)504。图5的vcsel 500是顶部发射vcsel,然而还设想在本公开中可以使用底部发射vcsel。可替代地,还设想本文描述的lidar发送器系统的激光能量源可以附加地和/或可替代地包括边缘发射器、led和/或集成能量源。
58.图6说明性地示出了lidar系统600,其包括lidar发送器系统601(诸如上面结合图2-5描述的lidar发送器系统)和lidar接收器系统602。lidar发送器系统601被配置为朝向lidar目标604发射激光能量603。反射的激光能量605朝向lidar接收器系统602传播,在lidar接收器系统602处,反射的激光能量605被检测并用于例如使用飞行时间计算来计算从lidar系统600到lidar目标604的距离。
59.lidar系统600可以作为闪光lidar操作,其中lidar发送器系统601发射激光脉冲(例如亚纳秒光脉冲),或者作为扫描lidar操作,其中lidar发送器系统601发射连续的定向光束。
60.lidar接收器系统602可以包括多个光电检测器,例如光电二极管(诸如pin二极管、单光子雪崩二极管、雪崩二极管)或被配置为检测从lidar目标604反射的激光能量605的光电晶体管。lidar接收器系统604的每个光电检测器充当通常对应于lidar发送器系统601的阵列中的一个激光能量源的检测像素。一对一像素-发射器对应关系可用于计算飞行时间直方图,该飞行时间直方图可用于检测和补偿来自例如lidar系统600的可选盖玻璃的任何内部反射,或者阵列的激光能量源与多个不同检测像素之间的任何串扰。
61.通过使用诸如关于图2-5描述的lidar发送器系统600,输出激光能量603在lidar目标604的平面处对焦。因此,输出光束的有效lidar范围和分辨率在lidar目标604处的整个照射区域上是一致的,因为光束强度和发散度在该距离处是一致的,并且在光束的周边没有下降。
62.图7说明性地示出了lidar系统700,其可以是图6的lidar系统600的示例。图7的示例lidar系统包括关于图2-5描述的类型的lidar发送器系统701和诸如关于图6描述的lidar接收器系统的lidar接收器系统702。lidar发送器系统701被配置为朝向lidar目标704发射激光能量(以说明性光线路径示出)706a、706b、706c、706d。通过使用根据本公开的lidar发送器系统701,当激光能量撞击lidar目标704时,激光能量在其整个照射区域上对焦。因此,光束强度和发散度在整个照射区域上是一致的。因此,当在lidar接收器系统702处检测到反射能量时,在检测到的激光能量束的周边处不存在信号强度或质量的下降。如上所述,这与已知的lidar系统形成对比,在已知的lidar系统中,lidar发送器的透镜的场曲阻止输出光束的周边在lidar目标处对焦,从而在光束撞击lidar目标时降低光束周边的光束强度,从而降低由lidar接收器系统检测到的任何反射信号的强度,并导致输出光束周边处的有效lidar范围和分辨率降低。
63.在图7的示例配置中,lidar接收器系统702包括布置在平坦表面上的光电检测器的阵列和布置在lidar目标704和光电检测器的阵列之间的光路中的透镜705。从lidar目标704反射的能量行进通过透镜705并撞击lidar接收器系统702的光电检测器的阵列。在图7的示例中,四个说明性光线路径706a、706b、706c、706d示出于lidar发送器系统701与lidar接收器系统702之间。虽然图7的配置中的光电检测器的阵列被示出为布置在平坦表面上,但是设想该阵列也可以布置在弯曲表面上,以便以与lidar发送器系统701的弯曲表面补偿lidar发送器系统701的透镜的场曲相同的方式补偿和/或完全抵消lidar接收器系统702的透镜705的场曲的影响。以这种方式,可以最小化和/或消除由lidar接收器系统702中的透镜场曲引起的有效lidar范围和/或分辨率的任何进一步减小。
64.图8a和8b说明性地示出了可以用作图6-7的lidar接收器系统的lidar接收器系统800。lidar接收器系统800包括布置在第二弯曲表面801上的光电检测器的阵列,光电检测器被配置为检测来自由例如图2-7中描述的类型的lidar发送器系统照射的lidar目标805的反射能量802。lidar接收器系统800还包括透镜803,透镜803布置在位于距透镜803距离806处的lidar目标805与布置在弯曲表面801上的光电检测器的阵列之间的光路中。从lidar目标805反射的能量802行进通过透镜803,撞击弯曲表面801上的lidar接收器系统800的光电检测器的阵列。在图8的示例中,在lidar目标805和lidar接收器系统800之间示出了五个说明性光线路径808a、808b、808c、808d、808e。第二弯曲表面801位于透镜803的像平面处,例如位于透镜803的有效焦距804处。第二弯曲表面801的曲率遵循第二透镜的场曲,从而以与上文关于本文描述的lidar发送器系统所描述相同的方式补偿和/或完全抵消场曲像差对透镜的焦场的影响。换句话说,第二弯曲表面的曲率遵循透镜803的弯曲焦场809或petzval表面。
65.如图8b所示,透镜803的场曲像差的影响被补偿,因为其上布置有光电检测器的阵列的弯曲表面801的曲率确保光电检测器位于透镜803的弯曲的像“平面”(即弯曲的焦场)中,从而确保在每个光电检测器处检测到的能量是对焦的。以这种方式,最小化和/或消除了场曲像差对lidar接收器系统800处的有效lidar范围和分辨率的任何影响。
66.图9说明性地示出了lidar系统900,其可以是图6的lidar系统600的示例配置。lidar系统900包括lidar发送器系统901(诸如上面关于图2-5描述的系统)和lidar接收器系统902(诸如关于图8a-8b描述的系统)。lidar发送器系统901被配置为朝向lidar目标904
发射激光能量903。反射的激光能量905朝向lidar接收器系统902传播,在lidar接收器系统902处,反射的激光能量905被检测并用于例如使用飞行时间计算来计算从lidar系统900到lidar目标904的距离。如上文关于图6所描述,lidar系统900可作为其中lidar发送器系统901发射激光脉冲(例如亚纳秒光脉冲)的闪光lidar操作,或作为其中lidar发送器系统901发射连续定向光束的扫描lidar操作。
67.图9的lidar系统900是特别有利的,因为来自lidar发送器系统901的透镜和lidar接收器系统902的透镜两者的场曲的影响被最小化和/或完全抵消。因此,图9的lidar系统900的有效lidar范围和分辨率在lidar目标904的整个视场(即,照射区域)上始终高于在视场周边遭受有效lidar范围下降和分辨率下降的已知lidar系统。
68.图10示出了示出根据本公开的方法步骤的流程图。一般而言,该方法涉及朝向lidar目标发射激光能量,并且可以与上述lidar发送器系统、lidar接收器系统和lidar系统结合使用。方法1000包括通过布置在激光能量源的阵列和lidar目标之间的光路中的第一透镜从激光能量源的阵列朝向lidar目标发射1001激光能量。激光能量源布置在第一弯曲表面上,第一弯曲表面位于第一透镜的像平面处,并且弯曲表面的曲率遵循第一透镜的场曲。执行上述方法步骤确保减小和/或消除透镜的场曲的影响。
69.可以设想,对于上述所有实施例,lidar发送器系统的弯曲表面可以包括弯曲晶圆(例如,固化的半导体材料的晶圆),例如在制造过程期间或作为制造过程的一部分,激光能量源已经布置在该弯曲晶圆上,在该制造过程中,激光发射器在晶圆级集成到表面中或表面上,这可以包括使用诸如加热和/或冷却的固化过程。例如,在激光能量源的阵列包括vcsel(例如图5所示类型的vcsel)阵列的情况下,弯曲表面可以包括弯曲的半导体晶圆,在晶圆的制造期间vcsel布置在该晶圆上和/或vcsel已经集成到该晶圆中。
70.一般而言,在制造本文描述的lidar发送器系统期间,设想激光能量源的阵列将首先布置在平坦表面上(例如,可以使用外延过程制造的具有集成vcsel的平坦晶圆),然后在表面中形成曲率,例如使用热处理,在该热处理期间压力被施加到表面的预定区域。因此,图11示出了示出根据本公开的方法步骤的流程图。图11所示的方法1100是制造本文所描述的lidar发送器系统的方法,并且包括测量1101第一透镜的场曲,将多个激光能量源作为阵列布置1102在平坦表面上,加热1103平坦表面以增加平坦表面的延展性,以及向平坦表面的预定区域施加1104压力以将平坦表面转换为弯曲表面。弯曲表面的曲率遵循第一透镜的所测量的场曲。一旦形成曲率,就将弯曲表面冷却1105以保持弯曲形状,并且将完成的弯曲表面(以及布置在其上的激光能量源的阵列)定位1106在第一透镜的像平面处。
71.由上述制造方法提供的优点在于,不需要改变现有的生产线,因为引入曲率的附加步骤可以与平坦晶圆和激光能量源阵列的制造分开执行。因此,本方法是生产有利的lidar发送器系统的特别有成本效益的方式。
72.本公开的实施例可以在许多不同的应用中采用,包括例如在机动车辆或无人机领域以及其他领域和行业中的3d面部识别、接近度检测、存在检测、对象检测、距离测量和/或碰撞避免。
73.附图标记列表:
74.100
ꢀꢀ
已知的lidar发送器系统
75.101
ꢀꢀ
激光源
76.102
ꢀꢀ
激光能量
77.103
ꢀꢀ
透镜
78.104
ꢀꢀ
有效焦距
79.105
ꢀꢀ
理想的平坦像平面
80.106
ꢀꢀ
到透镜的距离
81.107
ꢀꢀ
弯曲像“平面”/petzval表面
82.108a-e 光线路径
83.200
ꢀꢀ
已知的lidar接收器系统
84.201
ꢀꢀ
光电检测器的阵列201
85.202
ꢀꢀ
反射能量
86.203
ꢀꢀ
透镜
87.204
ꢀꢀ
有效焦距
88.205
ꢀꢀ
lidar目标
89.206
ꢀꢀ
到透镜的距离
90.208a-e 光线路径
91.209
ꢀꢀ
理想的平坦像平面
92.210
ꢀꢀ
弯曲像“平面”/petzval表面
93.300
ꢀꢀ
lidar发送器系统
94.301
ꢀꢀ
第一弯曲表面
95.302
ꢀꢀ
激光能量
96.303
ꢀꢀ
第一透镜
97.304
ꢀꢀ
第一有效焦距
98.305
ꢀꢀ
平坦化的petzval表面/焦场
99.306
ꢀꢀ
距透镜的距离
100.307
ꢀꢀ
理想的平坦像平面
101.308a-e 光线路径
102.401a 示例弯曲表面
103.401b 示例弯曲表面
104.402
ꢀꢀ
激光能量源的阵列
105.500
ꢀꢀ
垂直腔表面发射激光器(vcsel)
106.501
ꢀꢀ
分布式布拉格反射器(dbr)层
107.502
ꢀꢀ
有源区
108.503
ꢀꢀ
基板
109.504
ꢀꢀ
印刷电路板(pcb)
110.600
ꢀꢀ
lidar系统
111.601
ꢀꢀ
lidar发送器系统
112.602
ꢀꢀ
lidar接收器系统
113.603
ꢀꢀ
发射的激光能量
114.604
ꢀꢀ
lidar目标
115.605
ꢀꢀ
反射能量
116.700
ꢀꢀ
lidar系统
117.701
ꢀꢀ
lidar发送器系统
118.702
ꢀꢀ
lidar接收器系统
119.705
ꢀꢀ
透镜
120.706a-d 光线路径
121.800
ꢀꢀ
lidar接收器系统
122.801
ꢀꢀ
第二弯曲表面
123.802
ꢀꢀ
反射能量
124.803
ꢀꢀ
透镜
125.804
ꢀꢀ
有效焦距
126.805
ꢀꢀ
lidar目标
127.806
ꢀꢀ
距透镜的距离
128.808a-e 光线路径
129.809
ꢀꢀ
petzval表面或弯曲焦场
130.900
ꢀꢀ
lidar系统
131.901
ꢀꢀ
lidar发送器系统
132.902
ꢀꢀ
lidar接收器系统
133.903
ꢀꢀ
发射的激光能量
134.904
ꢀꢀ
lidar目标
135.905
ꢀꢀ
反射能量
136.1000 朝向lidar目标发射激光能量的方法
137.1001 发射激光能量
138.1100 制造lidar发送器系统的方法
139.1101 测量场曲
140.1102 布置多个激光能量源
141.1103 加热平坦表面
142.1104 施加压力
143.1105 冷却弯曲表面
144.1106 定位弯曲表面
145.本领域技术人员将理解,在前面的描述和所附权利要求中,诸如“上方”、“沿着”、“侧”等的位置术语是参考诸如附图中所示的概念性图示而做出的。使用这些术语是为了便于参考,但不旨在具有限制性质。因此,这些术语应被理解为是指当处于如附图中所示的取向时的对象。
146.尽管已经根据如上阐述的优选实施例描述了本公开,但是应当理解,这些实施例仅是说明性的,并且权利要求不限于那些实施例。鉴于本公开,本领域技术人员将能够进行修改和替代,这些修改和替代被认为落入所附权利要求的范围内。本说明书中公开或示出的每个特征可以结合在任何实施例中,无论是单独地还是以与本文公开或示出的任何其他特征的任何适当组合。
147.例如,虽然术语透镜在本文中以单数形式使用,但是设想本公开及其提供的优点可以同样地应用于包括多于一个透镜和/或反射镜或可以导致由光学系统产生的更复杂形状的场曲的其他光学组件的更复杂的光学系统。例如,具有多个透镜、一个或多个反射镜和/或其他光学组件的光学系统可以使光学系统的所得场曲具有波浪形(或其他更复杂形状的)场曲。因此,本文所描述的弯曲表面的曲率可以遵循更复杂形状的场曲,以提供与本文所描述的相同的优点。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。