基于两个光路折叠元件视场扫描的扫描长焦摄影机
1.相关申请的交叉引用
2.本技术主张2020年11月5日提交的美国临时专利申请号63/110,057的优先权,其内容整体通过引用的方式并入本文。
技术领域
3.本文公开的主题总体上涉及小型移动摄影机,且特别是涉及移动扫描长焦(tele)摄影机。
背景技术:
4.移动电子手持设备(或只是“移动设备”或“电子设备”)例如具有两个或更多小型摄影机(也称为“多摄影机”)的智能手机是已知的。两个或多个摄影机具有不同焦距的镜头,这些镜头以不同的视场(fields of view,fov)拍摄同一场景的多个图像。例如,一多摄影机可包括一广角摄影机及一长焦(或“变焦”)摄影机,广角摄影机具有例如80度的一广角摄影机视场(fovw),长焦摄影机具有例如25度的较窄的视场(“原生fov
t”或“n-fov
t”)且具有比广角摄影机更高(例如高3-5倍)的空间分辨率(spatial resolution)。
5.具有扫描能力的长焦摄影机(“扫描长焦摄影机(scanning tele cameras)”或“stc”)可将原生视场(native fields-of-view,n-fov
t
)扩展到有效的长焦视场(也称为“扫描fov
t”或“s-fov
t”)克服一些与窄n-fov
t
相关的限制。小型扫描长焦摄影机可以在一折叠摄影机中实现,例如在共同拥有的美国专利10578948中描述的,通过使光路折叠元件(optical path folding element,opfe)沿一个或两个方向旋转,以引导(或“扫描”或“转向”)n-fovt朝向s-fov
t
内的任意视点(points of view,pov)。
6.基于沿两个方向旋转单个光路折叠元件以进行fov扫描的扫描长焦摄影机具有缺点,例如有限的扫描范围(因为通常s-fov
t
《fovw)、视点像差以及在图像传感器上的图像旋转(称为“滚动”效果)。在共同拥有的国际专利申请pct/ib2021/056311中描述了校正视点像差和滚动效果的解决方案。
7.用于将小型扫描长焦摄影机整合到支持以下所有条件的移动设备中是需要且有益的:
[0008]-大的s-fov
t
,例如s-fov
t
=fovw;
[0009]-fov
t
扫描不会导致视点像差和/或滚动效果;及
[0010]-考虑到现代移动设备(尤其是智能手机)的尺寸限制,使用具有大光圈区域的镜头。
技术实现要素:
[0011]
在各种实施例中,提供了扫描长焦相机(stc),包括:一物侧光路折叠元件o-opfe,用于将一第一光路op1折叠到一第二光路op2;一物侧光路折叠元件致动器;一像侧光路折叠元件i-opfe,用于将所述第二光路op2折叠到一第三光路op3;一像侧光路折叠元件致动
器;一镜头;一镜头致动器;以及一图像传感器;其中所述扫描长焦摄影机具有stc原生视场n-fov
t
,其中所述物侧光路折叠元件致动器是配置为使所述物侧光路折叠元件围绕一第一轴旋转,且所述像侧光路折叠元件致动器是配置为使所述像侧光路折叠元件围绕一第二轴旋转以用所述原生视场n-fov
t
扫描一场景;其中所述镜头致动器是配置为移动所述镜头以沿着一第三轴聚焦;且其中所述第一轴垂直于所述第二轴并平行于所述第三轴。
[0012]
在一些实施例中,如上文或下文的扫描长焦摄影机被包括在一摄影机模块中,其中所述摄影机模块被划分为具有一模块区域高度hm的一第一区域和具有一肩部区域高度hs的一第二区域,所述镜头具有一最大孔径高度ha,所有高度是沿着所述第一光路op1所测得,其中hs《ha 3mm。在一些实施例中,hs《ha 2mm。在一些实施例中,hs《ha 1.5mm。在一些实施例中,hs《8mm且hm《10mm。在一些实施例中,hs《6.5mm且hm《8.5mm。
[0013]
在一些实施例中,所述像侧光路折叠元件具有沿着所述第一光路op1测量的一高度h
i-opfe
,其中h
i-opfe
《ha 2mm。在一些实施例中,h
i-opfe
《ha 1.5mm。
[0014]
在一些实施例中,所述物侧光路折叠元件具有沿着所述第一光路op1测量的一高度h
o-opfe
,其中hm《h
o-opfe
3mm。在一些实施例中,hm《h
o-opfe
2mm。
[0015]
在一些实施例中,所述扫描提供有效的长焦扫描视场s-fov
t
,其中所述长焦扫描视场s-fov
t
的一水平量度(horizontal dimension)h-fov
t
大于50度。在一些实施例中,h-fov
t
大于60度。
[0016]
在一些实施例中,所述镜头位于所述像侧光路折叠元件和所述图像传感器之间。
[0017]
在一些实施例中,所述第一光路op1、所述第二光路op2和所述第三光路op3互相垂直。
[0018]
在一些实施例中,所述物侧光路折叠元件围绕平行于所述第三光路op3的一第一轴旋转,用于在一第一扫描方向上扫描所述原生视场n-fov
t
;其中所述像侧光路折叠元件围绕平行于所述第一光路op1的一第二轴旋转,用于在一第二扫描方向上扫描所述所述原生视场n-fov
t
。
[0019]
在一些实施例中,所述物侧光路折叠元件和所述像侧光路折叠元件围绕一零扫描位置旋转超过
±
7.5度。
[0020]
在一些实施例中,所述物侧光路折叠元件和所述像侧光路折叠元件围绕一零扫描位置旋转超过
±
10度。
[0021]
在一些实施例中,所述物侧光路折叠元件是由一折射率n大于1.7的材料制成的一棱镜。
[0022]
在一些实施例中,所述像侧光路折叠元件是一棱镜。
[0023]
在一些实施例中,所述像侧光路折叠元件是一镜子。
[0024]
在一些实施例中,所述物侧光路折叠元件和所述像侧光路折叠元件包含在各自的物侧光路折叠元件支架和所述像侧光路折叠元件支架中,其中所述物侧光路折叠元件支架和所述像侧光路折叠元件支架均包含一杂散光罩。
[0025]
在一些实施例中,所述像侧光路折叠元件支架包含在由金属制成的一外壳中
[0026]
在一些实施例中,所述像侧光路折叠元件支架包含一外壳中,所述外壳具有沿着所述第一光路op1测量的一高度h
i-h
,其中所述高度h
i-h
小于0.5mm。
[0027]
在一些实施例中,所述像侧光路折叠元件支架包含一外壳中,所述外壳具有沿着
所述第一光路op1测量的一高度h
i-h
,其中所述高度h
i-h
小于0.25mm。
[0028]
在一些实施例中,所述扫描长焦摄影机有效焦距为7-10mm。在一些实施例中,所述扫描长焦摄影机有效焦距为10-25mm。在一些实施例中,所述扫描长焦摄影机有效焦距为25-50mm。
[0029]
在一些实施例中,所述物侧光路折叠元件致动器和/或所述像侧光路折叠元件致动器包括一音圈电机。
[0030]
在一些实施例中,所述镜头是一切割镜头,所述切割镜头包括一个或多个镜头元件li,其中每一个镜头元件li具有沿着所述第一光路op1测量的一高度h
li
和沿着所述第二光路op2测量的一宽度w
li
,其中h
li
≤0.9
·wli
。
[0031]
在各种实施例中,提供了一种包括如上文或下文的扫描长焦摄影机的移动设备,其中所述移动设备包括具有一常规高度h的一常规区域和具有一凸块高度hb的一凸块区域,其中所述像侧光路折叠元件、所述镜头和所述图像传感器都包含在所述常规区域中,且其中所述物侧光路折叠元件包含在所述凸块区域中。
[0032]
在一些实施例中,所述移动设备更包括具有一广角摄影机图像传感器和一广角视场(wide field-of-view,fovw)的一广角摄影机以及一应用处理器(ap)。在一些实施例中,所述应用处理器配置为使用来自所述广角摄影机的图像数据,以用所述扫描长焦摄影机的所述原生视场n-fov
t
对一场景进行自主扫描。在一些实施例中,所述应用处理器配置为根据一用户的输入,以所述扫描长焦摄影机的所述原生视场n-fov
t
对一场景进行扫描。在一些实施例中,所述移动设备更包括一极广角摄影机。
[0033]
在一些实施例中,在各种实施例中,提供了一种多摄影机,包括以上或以下的任何扫描长焦摄影机以及具有一广角摄影机图像传感器和一广角视场fovw的广角摄影机,其中有效的长焦扫描视场s-fov
t
具有一水平量度h-fov
t
,且其中广角视场fovw具有一水平量度h-fovw。
[0034]
在一些实施例中,h-fov
t
》0.7x h-fovw。
[0035]
在一些实施例中,h-fov
t
》0.8x h-fovw。在一些实施例中,h-fov
t
=h-fovw。在一些实施例中,s-fov
t
=fovw。在一些实施例中,s-fov
t
涵盖所述广角视场fovw的16:9片段。
[0036]
在一些实施例中,所述广角摄影机图像传感器和扫描长焦摄影机图像传感器具有各自成像平面,所述成像平面的方向互相垂直。
[0037]
在一些实施例中,所述有效的长焦扫描视场s-fov的一中心位置与所述广角视场fovw的一中心位置相同。
附图说明
[0038]
以下参考在此段落之后列出的附图描述本文公开的实施例的非限制性示例。附图和说明意在解释和阐明本文公开的实施例,且不应以任何方式被认为是限制性的。不同附图中的相同元件可以用相同的数字表示。附图中的元件不一定按比例绘制。
[0039]
图1a示出了包括本公开的折叠扫描长焦摄影机(stc)多摄影机;
[0040]
图1b以透视图示出包括包括图1a的多摄影机的手持设备;
[0041]
图1c示出一双摄影机fov,其包括来自一已知折叠扫描长焦摄影机摄影机的fovw、s-fov
t
和9个n-fov
t
;
[0042]
图1d示出了一双摄影机fov,其包括来自本公开的折叠扫描长焦摄影机的fovw、s-fov
t
和9个n-fov
t
;
[0043]
图2a以第一透视图示出本公开的折叠扫描长焦摄影机的一实施例;
[0044]
图2b以第二透视图示出图2a的折叠扫描长焦摄影机;
[0045]
图3a以剖视图示出了包括如图2a中的折叠扫描长焦摄影机的手持设备的一部分;
[0046]
图3b以剖视图示出本公开的另一摄影机模块的实施例,其包括图2a-2b中所示的折叠扫描长焦摄影机;
[0047]
图3c示出图3b的摄影机模块的另一剖面图;
[0048]
图4以剖视图示出了本公开的一摄影机模块;
[0049]
图5a以侧视图示出了物侧光路折叠元件(o-opfe)和物侧光路折叠元件致动模块;
[0050]
图5b以透视图示出图5a的物侧光路折叠元件支架和物侧光路折叠元件致动模块;
[0051]
图5c以另一透视图示出图5a-5b的物侧光路折叠元件支架和物侧光路折叠元件致动模块;
[0052]
图5d以透视图示出了另一个物侧光路折叠元件支架;
[0053]
图5e以另一透视图示出图5d的物侧光路折叠元件支架;
[0054]
图5f以侧视图示出了图5d-5e的物侧光路折叠元件支架;
[0055]
图6a以剖视图示出图3a的摄影机模块的部分;
[0056]
图6b以剖视图示出图3b的摄影机模块的部分;
[0057]
图6c示出了图6b的摄影机模块的部分,其中物侧光路折叠元件处于最大左扫描位置;
[0058]
图7a以俯视图示出了图2a的折叠扫描长焦摄影机中的像侧光路折叠元件(i-opfe)支架;
[0059]
图7b以剖视图示出了图3b的摄影机模块在没有模块外壳的情况;
[0060]
图7c以透视图示出了图3a的折叠扫描长焦摄影机中的像侧光路折叠元件支架;
[0061]
图8a以剖视图示出图3b的摄影机模块在没有模块外壳的情况下处于最大右扫描位置;
[0062]
图8b以剖视图示出图3b的摄影机模块在没有模块外壳的情况下处于最大左扫描位置;
[0063]
图9a以仰视图示出图7c的像侧光路折叠元件和像侧光路折叠元件致动器;
[0064]
图9b以透视图示出没有像侧光路折叠元件的像侧光路折叠元件致动器;
[0065]
图9c以透视图示出像侧光路折叠元件和像侧光路折叠元件致动模块。
具体实施方式
[0066]
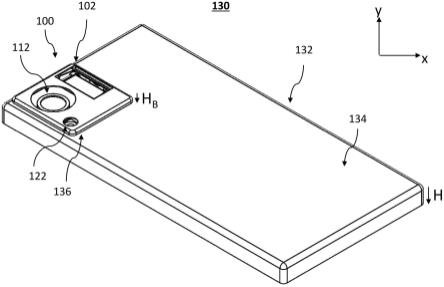
图1a示出了根据本公开的一些实施例的编号为100的一多摄影机,其包括编号为102的一折叠扫描长焦摄影机。折叠扫描长焦摄影机102包括一孔径104和一物侧光路折叠元件(object-side opfe,o-opfe)106,且被包括在一扫描长焦摄影机摄影机模块108中。多摄影机100还包括具有一广角孔径114的一广角摄影机112和具有一超广角孔径124的一超广角摄影机122。折叠扫描长焦摄影机102的一图像传感器(未示出)位于实质上平行于x-y平面的一平面中。广角摄影机112的一图像传感器(未示出)位于实质上平行于x-z平面的一
平面中。
[0067]
图1b在透视图中示出了编号为130的一移动设备(例如智能手机),其包括多摄影机100。移动设备130的后表面132是可见的。前表面(不可见)可以包括屏幕。后表面132被分成两个区域:一第一常规区域134及一第二“凸块(bump)”区域136,设备130在第一常规区域134中具有一高度h,且设备130在第二“凸块”区域136中具有高度h hb(hb是凸块的高度)。在一些实施例中,多摄影机100可以完全包括在凸块区域136中。在其他实施例中且例如图4所示,具有一第一高度h1的多摄影机100的第一区域可以包括在凸块区域136中,而具有一第二高度h2(h2《h1)的多摄影机100的第二区域可以包括在常规区域134中。从工业设计的角度来看,后者是优选的,因为它允许使凸块区域136的区域尺寸最小化。移动设备130可以另外包括一应用处理器(application processor,ap,未示出)。在一些示例中,应用处理器可配置为根据用户输入以扫描长焦摄影机102的原生视场n-fov
t
对一场景进行扫描。在其他示例中,应用处理器可配置为使用来自诸如一摄影机112之类的一广角摄影机的图像数据,以用扫描长焦摄影机102的原生视场n-fov
t
对一场景进行自主扫描。
[0068]
图1c示出了已知的双摄影机视场140,其包括来自一广角摄影机的视场fovw、一已知的扫描长焦摄影机的长焦扫描视场s-fov
t
、和来自已知扫描长焦摄影机的9个原生视场n-fov
t
,标记为1-9。fovw和s-fov
t
的中心位置相同。9个原生视场n-fov
t
代表扫描长焦摄影机的极端扫描位置。例如,n-fov
t
2对应沿着正y方向最大扫描位置,n-fov
t 3对应沿着正y方向和正x方向最大扫描位置等。每个原生视场n-fov
t
有一个n-fov
t
中心。例如,原生视场n-fov
t
7的中心由“原生fov
t
7的中心”表示。最大左侧扫描位置的原生视场n-fov
t
中心(lc-fov
t
)与最大右扫描位置的原生视场n-fov
t
中心(rc-fov
t
)之间的一水平距离(沿着x轴测量的“lc-fov
t-rc-fov
t“也被标示出。
[0069]
在与图1c相关的示例中,fovw在水平方向(h-fovw,沿x轴)为64度,在垂直方向(v-fovw,沿y轴)为48度。fov
t
在水平方向(h-fov
t
)为46度,在垂直方向(v-fov
t
)为36度。在这里,lc-fov
t-rc-fov
t
=27度。也就是说,fov
t
《fovw。在本例中,h-fov
t
≈0.7x h-fovw。这意味着扫描长焦摄影机无法捕获位于fovw边缘的对象。视点像差(pov aberration)和滚动效果(roll effect)在原生视场n-fov
t 1、3、4、6、7和9中可见。
[0070]
图1d示出了双摄影机视场150,其包括如本公开的扫描长焦摄影机的fovw、一长焦扫描视场s-fov
t
、和9个原生视场n-fov
t
,标记为1-9。fovw和s-fov
t
的中心位置相同。如在图1c中,fovw是h-fovw=64度且v-fovw=48度。在此,lc-fov
t-rc-fov
t
=41度。在图1d中,s-fov
t
≈fovw,h-fovw≈h-fov
t
且v-fovw≈v-fov
t
。这意味着扫描长焦摄影机可以拍摄位于fovw中的所有对象。在n-fov
t 1、3、4、6、7和9中,可见视点像差相当不明显,且没有滚动效应。
[0071]
在其他实施例中,s-fov
t
可以涵盖16:9的fovw图像比,亦即,h-fov
t
可能等于甚至大于h-fovw,但v-fov
t
可能小于v-fovw,例如按照16:9的比例。
[0072]
图2a以透视图示出了本公开的编号为200的一折叠扫描长焦摄影机的一实施例。图2b以另一透视图示出折叠扫描长焦摄影机200。参考图2a的坐标系,扫描长焦摄影机200包括物侧光路折叠元件202(例如棱镜或镜子)及一像侧光路折叠元件(image-side opfe,i-opfe)204(例如,棱镜或镜子,在图2a中不可见),物侧光路折叠元件202用于将实质上平行于y轴的第一光路(optical path)(op1)折叠到基本上平行于x轴的第二光路(op2)。像侧
光路折叠元件204用于将第二光路折叠到实质上平行于z轴的第三光路(op3)。此外,扫描长焦摄影机200包括一镜筒205,镜筒205包括一镜头206(此处仅部分可见)、一可选的光学窗208(例如ir滤光片)、及一图像传感器210。第一光路、第二光路和第三光路相互垂直。物侧光路折叠元件202由物侧光路折叠元件支架216承载,像侧光路折叠元件204由像侧光路折叠元件支架218承载。
[0073]
可见,物侧光路折叠元件202的光学活性区域、(在零扫描位置)平行于x-z平面的一顶部区域201和平行于y-z平面的侧面区域203大于像侧光路折叠元件204的光学活性区域、平行于y-z平面的一第一侧区域207(在零扫描位置)及平行于x-y平面的一第二侧区域209。较大的物侧光路折叠元件202的光学区域需要提供来自所有光场和像侧光路折叠元件204的所有扫描位置的光。
[0074]
在使用上,为了用n-fov
t
扫描一场景和/或光学防震(optical image stabilization,ois),一物侧光路折叠元件致动器212使物侧光路折叠元件202围绕实质上平行于第三光路的一旋转轴213旋转,且一像侧光路折叠元件致动器214使像侧光路折叠元件204围绕实质上平行于第一光路的一旋转轴215旋转。一镜筒致动器215(例如音圈电机-vcm)使镜筒205实质上平行于第三光路移动,以自动对焦(autofocusing,af)。在其他示例中,诸如镜筒致动器215可以额外地使镜筒205实质上平行于第一光路和/或第二光路移动,用于光学防震。扫描长焦摄影机200包括像侧光路折叠元件防掉落模块260,其设计成在包括摄影机模块的移动设备掉落时,防止物侧光路折叠元件支架212从包括扫描长焦摄影机200的摄影机模块中掉出。像侧光路折叠元件支架218包括一个像侧光路折叠元件外壳219。在一些摄影机模块实施例中(例如在下面的实施例360中),像侧光路折叠元件外壳219,其具有“c”形,意味着它在非光学活性的三个侧(顶面、底面和背面)围绕像侧光路折叠元件204。
[0075]
扫描长焦摄影机200的有效焦距(efl)可以在5-50mm的范围内。
[0076]
物侧光路折叠元件致动器212包括一物侧光路折叠元件致动模块220和一物侧光路折叠元件传感模块230。这两个模块可以是单独的模块。物侧光路折叠元件传感模块230位于物侧光路折叠元件支架216的两侧。物侧光路折叠元件致动模块220包括线圈222(此处不可见,但图3b中示出)、致动磁体224(此处不可见,但图3b中示出)和致动轭226。物侧光路折叠元件传感模块230包括一位置传感器(例如霍尔传感器)232(参见图5a)和一传感磁体234(参见图5a)。将物侧光路折叠元件致动模块220和物侧光路折叠元件传感模块230分开的一个优点是使位置传感器232与致动线圈222解耦(decoupled)。
[0077]
像侧光路折叠元件致动器214包括一像侧光路折叠元件致动模块240和一像侧光路折叠元件传感模块250。这两个模块可以是单独的模块。像侧光路折叠元件致动模块240包括致动线圈242和致动磁体244。像侧光路折叠元件传感模块250包括一位置传感器(例如霍尔传感器)252(如图7a所示)和一传感磁体254(如图7a所示)。将像侧光路折叠元件致动模块240和像侧光路折叠元件传感模块250分开的一个优点是使位置传感器252与致动线圈242解耦。像侧光路折叠元件204的旋转轴215与像侧光路折叠元件致动模块240的距离相对较大,因此用于旋转像侧光路折叠元件的杠杆较大。像侧光路折叠元件204的旋转轴215与像侧光路折叠元件传感模块240的距离相对较近,因此可以用小行程,即在小距离上感测像侧光路折叠元件204的旋转。
[0078]
图3a示出了编号为310的摄影机模块的一实施例的一横截面图,其包括本公开的扫描长焦摄影机并编号为300。摄影机模块310被容纳在(被包围)一摄影机模块外壳321中。扫描长焦摄影机300包括由一物侧光路折叠元件支架316承载且用于将一第一光路折叠到一第二光路的一物侧光路折叠元件302(例如棱镜)、由一像侧光路折叠元件支架318承载的且用于折叠第二光路至一第三光路的一像侧光路折叠元件304(例如棱镜)、包括一镜头(未示出)的一镜筒(未示出)、可选的光学元件(未示出)和一图像传感器(未示出)。第一光路、第二光路和第三光路未示出,但彼此垂直并沿着相同的轴,如扫描长焦摄影机200所示。
[0079]
物侧光路折叠元件致动器312使物侧光路折叠元件302围绕实质上平行于第三光路的轴311旋转,且像侧光路折叠元件致动器314(在此不可见,参见图9a、9b)使像侧光路折叠元件304围绕实质上平行于第一光路的轴333旋转。镜筒致动器(未示出)使镜筒沿着实质上平行于用第三光路线性地移动,以自动对焦。在其他示例中,所述镜筒致动器可以另外使镜筒实质上平行于第一光路和/或第二光路移动,以光学防震。像侧光路折叠元件支架318包括像侧光路折叠元件外壳319。扫描长焦摄影机300的有效焦距(efl)可以在5-50mm的范围内。
[0080]
物侧光路折叠元件致动器312包括物侧光路折叠元件致动模块320和物侧光路折叠元件传感模块330(参见图5e-f)。物侧光路折叠元件致动模块320包括致动线圈322、致动磁体324和致动轭326。物侧光路折叠元件致动模块320包括致动线圈322、致动磁体324和致动轭326。物侧光路折叠元件传感模块330包括位置传感器338(例如霍尔传感器,参见图5e-f)和传感磁体334(参见图5e-f)。将物侧光路折叠元件致动模块320和物侧光路折叠元件传感模块330分开的一个优点是位置传感器338与致动线圈322解耦。
[0081]
像侧光路折叠元件致动器314包括一像侧光路折叠元件致动模块340(参见图9a-c)和一像侧光路折叠元件传感模块350(参见图9a、9b)。像侧光路折叠元件致动模块340包括一线圈902和一致动磁体904。像侧光路折叠元件传感模块350包括一位置传感器352和一传感磁体914。将像侧光路折叠元件致动模块340和像侧光路折叠元件传感模块350分开的优点是使位置传感器352与致动线圈902解耦。如图9a中可见,像侧光路折叠元件304的旋转轴333远离像侧光路折叠元件致动模块340,因此用于旋转像侧光路折叠元件304的杠杆较大。如图9a所示,旋转轴333相对靠近像侧光路折叠元件传感模块340,因此像侧光路折叠元件304的旋转可在小行程中被感测。图3a还示出了物侧光路折叠元件302的旋转轴311和像侧光路折叠元件支架318的上下边缘(表面)的一厚度h
i-h
。物侧光路折叠元件被示为处于零扫描位置。
[0082]
摄影机模块310具有一不均匀(或非平面)的顶面313,故摄影机模块310被分成两个区域,摄影机模块310包括具有一模块高度hm的一升高区域315和具有一肩部高度hs小于模块高度hm的一“肩部”区域317。摄影机模块310具有一均匀的(或平面的)底面319。物侧光路折叠元件302位于升高区域315。像侧光路折叠元件304、镜筒305、光学元件307和图像传感器308位于所述肩部区域317。
[0083]
物侧光路折叠元件支架挡块328通过限制物侧光路折叠元件支架316的旋转运动来定义物侧光路折叠元件302的旋转范围。
[0084]
图3b在截面图中示出了编号为360并且包括图2a-2b中所示的扫描长焦摄影机的另一个摄影机模块的实施例。图3c以另一截面图示出了摄影机模块360。在这些图中的一个
或多个中可以看到镜头206、旋转轴213、像侧光路折叠元件支架218的上边缘和下边缘的厚度h
i-h
以及像侧光路折叠元件预负荷模块710。镜头206的高度标记为“h
a”。
[0085]
物侧光路折叠元件202在零扫描位置被示出。摄影机模快360被摄影机模快外壳370包围。摄影机模快360具有不均匀(或非平面)的顶面363,以使摄影机模快360被分成两个区域,摄影机模快360包括具有一模块高度hm的一升高区域365,和具有一肩部高度hs小于模块高度hm的一“肩部”区域367。摄影机模快360具有均匀的(或平面的)底面369。物侧光路折叠元件202位于升高区域365中。像侧光路折叠元件204、镜筒205、光学元件208和图像传感器210位于肩部区域367中。
[0086]
分别位于摄影机模块310和360中的旋转轴311和213位置使得分别旋转物侧光路折叠元件302和202不会导致模块高度hm的任何高度损失(height penalty)。这是因为分别围绕旋转轴311和213旋转的物侧光路折叠元件302和202不会导致物侧光路折叠元件支架316和216占据的y值明显小于物侧光路折叠元件支架316和216在零扫描位置所占据的y值。
[0087]
物侧光路折叠元件支架挡块228定义了物侧光路折叠元件202的旋转范围。
[0088]
众所周知,小型摄影机需要相对较低的f值(“f/#”),因为低f值会提高摄影机图像的信噪比(snr),从而提高摄影机的图像质量。此外还有通过最大化摄影机镜头的光圈区域(aa)来实现低f值。为了获得具有低f值的扫描长焦摄影机,光圈区域将被最大化,给定特定的hs高度约束,这由包括扫描长焦摄影机的移动设备的高度(或厚度)决定。为了最大化光圈区域,可以同时最大化ha(镜头孔径的高度,沿y轴测量,参见图3c)和wa(镜头孔径的宽度,沿x轴测量,即垂直于图3c所示的平面)。
[0089]
为了使ha最大化,需要使ha和hs之间的高度差(“penalty”或“p”)最小化。为了使p最小化,需要将h
i-o
最大化,如下所述。为了最小化h
i-h
(对于给定的hs最大化h
i-o
),像侧光路折叠元件外壳219可以由金属制成。在一个示例中,h
i-h
约为0.15mm。外壳219可以例如是一金属框架,其以“c”形包围在像侧光路折叠元件204的顶部、底部和非光学活性一侧。对于相同的肩部高度hs,较小的h
i-h
允许像侧光路折叠元件204具有比像侧光路折叠元件304明显更大的高度h
i-o
。h
i-o
是ha的上限(参见图3c),即h
i-o
》ha。这是因为小于h
i-o
的h
i-o
会导致渐晕(vignetting),即仍然可以到达镜头的光会被像侧光路折叠元件204阻挡,从而减小光学系统的孔径。
[0090]
ha、hm和hs,以及物侧光路折叠元件202的各自的高度h
o-o
(或h
o-opfe
沿y轴测量)和像侧光路折叠元件的h
i-o
(或h
i-opfe
)在图3a-c示出。
[0091]
在一个示例中,摄影机模块360具有以下值:
[0092]-hs=5.8mm
[0093]-ha=4.4mm
[0094]-p=1.4mm
[0095]-hm=7.3mm
[0096]-h
o-o
=5.5mm
[0097]-h
i-o
=4.8mm
[0098]
在其他示例中,hs的值可在3-15mm范围内,ha的值可在2-13mm范围内,hm的值可在4-20mm范围内,h
i-o
的值可在2.5-15mm范围内,h
o-o
的值可在2-20mm范围内。
[0099]
为了最大化wa,如本领域已知的,例如可以“切割”(或“d-cut”)镜头206。切割镜头
包括一个或多个镜头元件li,其具有一高度h
li
小于它们的宽度w
li
。在一些示例中,w
li
可以比h
li
大约5%-100%的百分比。关于摄影机模块360中的示例,具有高度ha=4.4mm的切割镜头206的wa可以在4.4mm-10mm的范围内。
[0100]
图4以剖视图示出了包括摄影机模块310的移动设备400的一部分。移动设备400的后(背面)表面410被分成两个区域:一第一常规区域412以及一第二“凸块”区域414,设备400在第一常规区域412具有一常规高度h,设备400在第二“凸块”区域414具有一升高高度h hb。像侧光路折叠元件传感模块350和位置传感器352是可见的。
[0101]
为了将摄影机模块310紧密地整合到移动设备400中,升高区域315(具有高度hm)整合在移动设备400的升高的凸块区域414中,且肩部区域317(具有高度hs)整合在移动设备400的常规区域412中。在其他实施例中,摄影机模块360可以相同的方式被包括在例如移动设备400的移动设备中,即,它的升高区域365可以整合在移动设备的升高的凸块区域中,且其肩部区域367可以整合在所述移动设备的一常规区域中。
[0102]
图5a以侧视图示出物侧光路折叠元件支架216、物侧光路折叠元件致动模块220和物侧光路折叠元件传感模块230。旋转轴213和致动轭226是可见的。旋转由一枢轴球504调节。如图6a所示,物侧光路折叠元件支架挡块228限制了物侧光路折叠元件支架216的移动范围。物侧光路折叠元件传感模块230位于物侧光路折叠元件202旁边,并且磁感测发生在平行于x-y平面的一平面中。
[0103]
图5b以透视图示出物侧光路折叠元件支架216和物侧光路折叠元件致动模块220。两个物侧光路折叠元件支架挡块228、旋转轴213和致动轭226是可见的。
[0104]
图5c以另一透视图示出物侧光路折叠元件支架216和物侧光路折叠元件致动模块220。物侧光路折叠元件致动磁体224以及图5a和5b中所示的一些部件在这里也是可见的。
[0105]
图5d以透视图示出物侧光路折叠元件支架316。物侧光路折叠元件支架316包括用于防止杂散光的两个杂散光罩512和514。物侧光路折叠元件302和物侧光路折叠元件可以是由高折射率(“n”)材料(例如n》1.7)制成的棱镜,用于紧凑型光束引导,即使在最大旋转角度和/或最大光场的情况下,也允许一小型摄影机模块具有小于30%渐晕(光损失)。
[0106]
图5e以另一透视图示出物侧光路折叠元件支架316。包括位置传感器338和传感磁体334的物侧光路折叠元件传感模块330是可见的。
[0107]
图5f以又一个透视图示出了物侧光路折叠元件支架支架316。物侧光路折叠元件致动模块320和物侧光路折叠元件感测模块330是可见的。磁感应发生在垂直于x-y平面的一平面中。
[0108]
图6a以剖视图示出了摄影机模快310的一部分。物侧光路折叠元件302显示在最大右侧扫描位置。此处的“右”扫描位置指的是扫描长焦摄影机300的n-fov
t
通过沿顺时针旋转方向602围绕旋转轴311旋转物侧光路折叠元件302而朝向右侧。在此位置,物侧光路折叠元件支架挡块328通过接触模块外壳321来限制物侧光路折叠元件支架316的进一步顺时针旋转运动。这防止物侧光路折叠元件支架316和像侧光路折叠元件支架318(未示出)相互接触,并且它定义(或限制)物侧光路折叠元件302在顺时针方向上的最大旋转(或“扫描”)范围。因此,通过让物侧光路折叠元件316和物侧光路折叠元件318位置彼此靠近,物侧光路折叠元件支架挡块328允许了小型的摄影机设计(例如在智能手机摄影机中)。
[0109]
图6b以剖视图示出了摄影机模快360的一部分。物侧光路折叠元件202示出在最大
右侧扫描位置。在此位置,物侧光路折叠元件支架右挡块612通过接触模块外壳370来限制物侧光路折叠元件支架216的进一步顺时针旋转运动。
[0110]
图6c示出了图6b中所示的摄影机模块360的一部分,其中物侧光路折叠元件202处于最大左侧扫描位置。此处的“左”扫描位置指的是扫描长焦摄影机200的n-fov
t
通过沿逆时针旋转方向604围绕旋转轴213旋转物侧光路折叠元件202而朝向左侧。物侧光路折叠元件支架左挡块614通过接触模块外壳370来限制物侧光路折叠元件支架216的进一步逆时针旋转运动。
[0111]
如图6b-c所示,物侧光路折叠元件202的扫描范围可以是对称的,即相对于零扫描位置朝向左侧(较低x值)和右侧(较高x值)的扫描范围是相同的。物侧光路折叠元件202的最大旋转范围可为约
±
11.5度,其中约
±
10度可用于扫描n-fov
t
,且约
±
1.5度可用于光学防震。在其他示例中,扫描范围可以不同的比率用于fov扫描和光学防震,例如约
±
10.5度可用于扫描n-fov
t
,约
±
1.0度可用于光学防震。在其他示例中,物侧光路折叠元件202的最大旋转范围可以是大约
±
5度
‑±
20度。
[0112]
图7a以俯视图示出了像侧光路折叠元件支架218。像侧光路折叠元件支架218的旋转轴215被示出。枢轴球704位于在旋转中心轴线215的一枢轴槽706中(此处不可见,但参见图7b)中,以调节旋转运动。像侧光路折叠元件预负荷模块710包括像侧光路折叠元件预负荷磁体712(此处不可见,但在图7b中)和像侧光路折叠元件预负荷轭714。像侧光路折叠元件支架218具有用于驱动(模块240)、感测(模块250)和预负荷(模块710)的独立模块。像侧光路折叠元件204的旋转由两个球槽机构调节,第一个是由球722和槽724所形成,第二个是由球726和槽728所形成。
[0113]
像侧光路折叠元件支架218包括像侧光路折叠元件防掉落与停止旋转模块740。模块740包括第一槽742和第二槽746。一第一销744(此处不可见,但在图8a-b中)插入凹槽742中,且一第二销748(此处不可见,但在图8a-b中)插入凹槽746中。
[0114]
图7b以剖视图示出了没有包覆模块外壳370的摄影机模块360。预负荷磁体712是可见的。
[0115]
图7c以透视图示出了像侧光路折叠元件支架318。此处所示的像侧光路折叠元件支架318包括两个杂散光罩752和754,用于防止杂散光。
[0116]
图8a以横截面图示出了处于最大右扫描位置的没有顶面363的摄影机模块360。这里的“右”扫描位置指的是像侧光路折叠元件204的面物侧(object-facing side)802通过沿顺时针旋转方向702围绕旋转轴215旋转而朝向右侧。摄影机模块360包括两个像侧光路折叠元件防掉落模块740,其被设计成防止像侧光路折叠元件支架218在包括它的移动设备掉落的情况下,从例如310或360的摄影机模块中掉出。每个像侧光路折叠元件防掉落模块740包括销和槽组件:销744插入槽742中,且销748插入槽746中。
[0117]
像侧光路折叠元件防掉落和停止旋转模块740是可见的。它可以防止像侧光路折叠元件支架218在包括它的移动设备掉落的情况下,从诸如摄影机模块310或摄影机模块360中掉出。模块740还限制像侧光路折叠元件204的旋转运动。在最大右侧扫描位置,销744接触槽742的一顶部边缘(具有最高y值的边缘804),销748接触槽746的一右侧边缘(具有最高x值的边缘)。这可以防止像侧光路折叠元件204进一步顺时针旋转。
[0118]
镜筒致动滚珠引导模块808包括两个槽轨模块810和812,它们调节镜筒205的运
动。
[0119]
图8b在横截面图中示出了处于最大左扫描位置的没有顶面363的摄影机模块360。像侧光路折叠元件204的面物侧802通过沿逆时针旋转方向704围绕旋转轴215旋转而朝向左侧。在最大左侧扫描位置,销744和销748分别接触凹槽742和746的一底部边缘814(具有最低y值的边缘)和一左侧边缘816(具有最低x值的边缘)。
[0120]
如图8a-b所示,像侧光路折叠元件204的扫描范围可以是对称的,即相对于零扫描位置,朝向左侧(较低的x值)和右侧(较高的x值)的扫描范围是相同的。像侧光路折叠元件204的最大旋转范围可为约
±
14度,其中约
±
12.5度可用于扫描n-fov
t
,约
±
1.5度可用于光学防震。在其他示例中,扫描范围可以不同的比率用于fov扫描和光学防震。在其他示例中,像侧光路折叠元件204的最大旋转范围可为大约
±
5度
‑±
25度。
[0121]
图9a-c示出了像侧光路折叠元件304以及使像侧光路折叠元件304围绕旋转轴333旋转的像侧光路折叠元件致动器314。像侧光路折叠元件致动器314包括像侧光路折叠元件致动模块340和像侧光路折叠元件传感模块350。
[0122]
图9a以仰视图示出了像侧光路折叠元件304和像侧光路折叠元件致动器314。像侧光路折叠元件致动模块340包括一致动线圈902和一致动磁体904。像侧光路折叠元件传感模块350包括位置传感器352和一传感磁体914。一枢轴球922位在旋转轴333上。枢轴球922和支撑球924及926调节像侧光路折叠元件304的旋转。
[0123]
图9b以一透视图示出了没有像侧光路折叠元件304的像侧光路折叠元件致动器314。图9c以透视图示出了像侧光路折叠元件304和像侧光路折叠元件致动模块340。包含在像侧光路折叠元件传感模块350中的传感轭916是可见的。旋转轴333被标示出。包括在像侧光路折叠元件传感模块350中的传感轭916在图9b和9c中都是可见的。
[0124]
使用两个单独的磁体(904和914)分离了感测和致动。位置传感器352与线圈902的磁场解耦。旋转轴333与像侧光路折叠元件致动模块340的距离相对较大,提供了大杠杆以旋转致动。旋转轴333与位置传感器352的距离相对较短,因此可以在小行程内执行像侧光路折叠元件304的大旋转致动的感测。
[0125]
尽管已经根据某些实施例和通常相关联的方法描述了本公开,但是实施例和方法的改变和排列组合对于本领域技术人员来说是显而易见的。本公开应理解为不受本文描述的具体实施例的限制,而仅受随附权利要求的范围的限制。
[0126]
此外,为了清楚起见,本文使用术语“实质上(substantially)”意味着在可接受范围内变化的可能性。根据一个示例,本文使用的术语“实质上”应被解释为表示高于或低于任何指定值的最多5%的可能变化。根据另一示例,本文使用的术语“实质上”应解释为暗示高于或低于任何指定值的最多2.5%的可能变化。根据另一示例,本文使用的术语“实质上”应被解释为表示高于或低于任何指定值的最多1%的可能变化。
[0127]
本说明书中提及的所有参考文献均以整体引用方式并入本说明书中,其程度如同每个单独的参考文献被具体地和单独地指明而通过引用并入本文中。此外,本技术中任何参考文献的引用或标识不应被解释为承认此类参考文献是可用的或被承认为现有技术。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。