1.本发明涉及危险废物检测的技术领域,尤其涉及一种应用于刚性填埋场的智能巡检系统。
背景技术:
2.危险废物是不能被重新利用的垃圾在各项处理工序后生成的最终产品,人们需要根据危险废物的分类标准将危险废物分别收容至刚性填埋场或柔性填埋场内。
3.其中,针对刚性填埋场,在刚性填埋场的危险性没有完全消除之前,工作人员需要保持在刚性填埋场内进行日常巡检,以及时处理刚性填埋场中各危险废物产生的渗漏液。
4.目前,主要依靠工作人员在刚性填埋场内进行人工定期巡检,并在刚性填埋场出现渗漏时及时采取应对措施。由于供工作人员巡检及检修的空间位于刚性填埋场的下部,需要工作人员进入刚性填埋场底部,存在可视性差且空气中可能存在有毒有害气体的缺陷,不利于人体健康,巡检效率不高。
5.由于供工作人员巡检及检修的空间内可视性差,对工作人员判断渗漏点的工作造成困难,且人工判断渗漏点受主观意见及人的目力影响,存在准确性有限的缺陷。
技术实现要素:
6.针对现有技术中存在的问题,本发明提供一种应用于刚性填埋场的智能巡检系统,包括:
7.多个巡检机器人,用于在巡检过程中实时采集一巡检图像;
8.机器人驿站,分别连接各所述巡检机器人,所述机器人驿站包括:
9.第一处理模块,用于在所述巡检图像表示对应的图像采集区域存在可疑渗漏点时控制对应的所述巡检机器人采集得到所述图像采集区域的近红外光图谱图像;
10.第二处理模块,用于接收各所述巡检机器人采集得到的所述近红外光图谱图像,根据各所述近红外光图谱图像处理得到所述图像采集区域包含的各所述可疑渗漏点,并控制所述巡检机器人对各所述可疑渗漏点进行取样得到对应的渗漏样本;
11.样本检测模块,用于对各所述巡检机器人巡检完成后取样得到的各所述渗漏样本进行检测得到对应的渗漏检测结果,并根据各所述渗漏检测结果处理生成一巡检报告,以供一工作人员对各所述可疑渗漏点进行检查。
12.优选的,所述样本检测模块包括:
13.预处理单元,用于根据所述刚性填埋场内填埋的危险废物,由预先配置的多个标准检测项目中选取至少一所述标准检测项目并作为实际检测项目输出;
14.检测单元,连接所述预处理单元,用于根据所述实际检测项目对各所述渗漏样本分别进行检测得到对应的所述渗漏检测结果,并根据各所述渗漏检测结果处理生成所述巡检报告,以供所述工作人员对各所述可疑渗漏点进行检查。
15.优选的,所述检测单元包括:
16.检测子单元,用于根据所述实际检测项目对各所述渗漏样本分别进行检测得到对应的所述渗漏检测结果;
17.判断子单元,连接所述检测子单元,用于在所述渗漏检测结果表示所述可疑渗漏点存在一危险废物的渗漏现象时,将对应的所述可疑渗漏点作为一待处理渗漏点保存;
18.报告处理子单元,连接所述判断子单元,用于根据所述待处理渗漏点处理生成所述巡检报告。
19.优选的,所述危险废物具有对应的典型特征物相,将所述典型特征物相作为一标准指纹特征,则所述检测子单元用于根据所述实际检测项目检测所述渗漏样本中的物相成分,并根据所述物相成分及所述标准指纹特征处理得到所述渗漏检测结果;
20.则所述判断子单元用于在所述渗漏检测结果表示存在所述物相成分中与所述标准指纹特征相匹配时,所述渗漏检测结果表征所述可疑渗漏点存在所述危险废物的所述渗漏现象,并将对应的所述可疑渗漏点作为所述待处理渗漏点保存。
21.优选的,所述巡检机器人还配置有一信标箱,所述信标箱内放置有多个信标,则所述检测单元还包括一控制子单元,所述控制子单元连接所述判断子单元,用于在所述巡检机器人的巡检过程中,控制所述巡检机器人在所述可疑渗漏点处放置所述信标,以供所述工作人员定位各所述可疑渗漏点并进行检查。
22.优选的,还包括一中央控制平台,分别连接各所述巡检机器人及所述机器人驿站,所述中央控制平台包括一中央数据中心,所述中央数据中心用于实时获取所述巡检报告及各所述巡检机器人的工作状态并展示。
23.优选的,所述巡检机器人配置有多组气体传感器,则所述中央控制平台还包括一第一远程监控单元,用于根据外部输入的探测指令控制所述巡检机器人在行走过程中驱动所述气体传感器进行气体检测以得到在所述气体传感器的检测范围内的各类危害气体的浓度值并输出;
24.则所述样本检测模块根据各所述危害气体的所述浓度值及所述渗漏检测结果处理生成所述巡检报告并保存。
25.优选的,所述中央控制平台还包括一第二远程监控单元,用于根据外部输入包含一目的地的一引导指令控制所述巡检机器人引导所述工作人员到达所述目的地。
26.优选的,所述中央控制平台还包括一第三远程监控单元,用于根据外部输入包含至少一执行动作的一控制指令控制所述巡检机器人执行各所述执行动作。
27.优选的,所述中央控制平台还包括一渗漏预测单元,连接所述中央数据中心,所述渗漏预测单元包括:
28.提取子单元,用于获取所述刚性填埋场在预设的一时间段内生成的所有所述巡检报告,根据所述巡检报告提取得到各所述可疑渗漏点,并将所述可疑渗漏点作为一历史渗漏点保存;
29.渗漏预测子单元,连接所述提取子单元,用于根据所述刚性填埋场的建筑图纸构建一填埋场模型,并根据各所述历史渗漏点及所述填埋场模型处理得到对应的渗漏高发区域,以供所述工作人员根据所述渗漏高发区域对所述刚性填埋场进行维护。
30.上述技术方案具有如下优点或有益效果:
31.(1)、多个巡检机器人在刚性填埋场内沿着巡检路径检测沿途可能存在的可疑渗
漏点,通过对可疑渗漏点的渗漏样本进行样本处理以得到样本的检测结果,通过检测结果判断可疑渗漏点是否存在危险废物的渗漏现象,减少了工作人员在刚性填埋场内巡检并判断可疑渗漏点的情况,工作人员根据巡检报告可直接前往存在渗漏现象的可疑渗漏点的取样坐标以处理可疑渗漏点,提高了巡检效率;
32.(2)、对巡检图像中的可疑渗漏点对应的图像采集区域进行近红外光图谱图像的采集,由各近红外光谱图像对各可疑渗漏点再进行样本采集,以缩减巡检机器人采样样本的工作量,起到提高判断可疑渗漏点的效率的作用;
33.(3)、通过气体检测模块对刚性填埋场的空气中包含的危害气体进行含量检测得到刚性填埋场内各类危害气体的浓度值,工作人员进入刚性填埋场时,根据巡检报告中的各类危害气体的浓度值采取对应的防护措施,起到保障工作人员的人身安全的作用。
附图说明
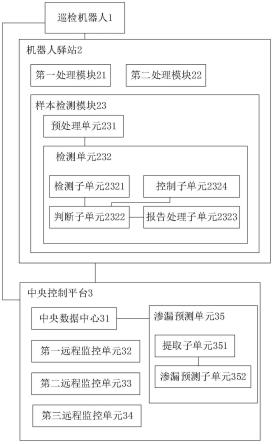
34.图1为本发明的较佳的实施例中,智能巡检系统的控制原理图。
具体实施方式
35.下面结合附图和具体实施例对本发明进行详细说明。本发明并不限定于该实施方式,只要符合本发明的主旨,则其他实施方式也可以属于本发明的范畴。
36.本发明的较佳的实施例中,基于现有技术中存在的上述问题,现提供一种应用于刚性填埋场的智能巡检系统,如图1所示,包括:
37.多个巡检机器人1,用于在巡检过程中实时采集一巡检图像;
38.机器人驿站2,分别连接各巡检机器人1,机器人驿站2包括:
39.第一处理模块21,用于在巡检图像表示对应的图像采集区域存在可疑渗漏点时控制对应的巡检机器人1采集得到图像采集区域的近红外光图谱图像;
40.第二处理模块22,用于接收各巡检机器人1采集得到的近红外光图谱图像,根据各近红外光图谱图像处理得到图像采集区域包含的各可疑渗漏点,并控制巡检机器人1对各可疑渗漏点进行取样得到对应的渗漏样本;
41.样本检测模块23,用于对各巡检机器人1巡检完成后取样得到的各渗漏样本进行检测得到对应的渗漏检测结果,并根据各渗漏检测结果处理生成一巡检报告,以供一工作人员对各可疑渗漏点进行检查。
42.具体地,本实施例中,在刚性填埋场中划分多个互不干涉的巡检区域,每个巡检区域内分别配置一个巡检机器人1,以减少各巡检机器人1重复采集同一区域的巡检图像的情况,使得巡检资源的分配更加合理化。
43.由巡检机器人1在日常巡检过程中进行巡检图像、近红外光谱图像及渗漏样本的采集,并将采集到的渗漏样本送回至机器人驿站2,以减少工作人员进入刚性填埋场内进行人工巡检、人工取样的情况,起到提高巡检效率、保障工作人员的生理健康的作用。
44.可疑渗漏点的分析过程中,首先,获取巡检机器人1在巡检过程中实时采集的巡检图像;接着,对巡检图像进行特征提取得到至少一特征点;随后,将特征点作为可疑渗漏点,控制巡检机器人1对巡检图像对应的图像采集区域进行近红外光图谱图像的采集;而后,根据各近红外光图谱图像处理得到所述近红外光图谱图像中的可疑渗漏点处各有机物对应
的各实际组分含量,并在实际组分含量不符合预先配置的标准组分含量时,控制巡检机器人1对不符合标准组分含量的可疑渗漏点进行样本采集;
45.本发明的较佳的实施例中,样本检测模块23包括:
46.预处理单元231,用于根据刚性填埋场内填埋的危险废物,由预先配置的多个标准检测项目中选取至少一标准检测项目并作为实际检测项目输出;
47.检测单元232,连接预处理单元231,用于根据实际检测项目对各渗漏样本分别进行检测得到对应的渗漏检测结果,并根据各渗漏检测结果处理生成巡检报告,以供工作人员对各可疑渗漏点进行检查。
48.具体地,本实施例中,由于可疑渗漏点的有机物组成不同,在近红外光作用下,不同的有机物在近红外光谱图像中存在差异,因而根据近红外光谱图像中包含的各类有机物类型及对应的实际组分含量可初步判定近红外光谱图像中的可疑渗漏点。
49.根据已知危险废物包含的有机物成分,将已知的有机物成分与可疑渗漏点检测得到的有机物类型进行匹配,在渗漏样本中的成分与危险废物相符时,表示存在危险废物的渗漏现象,需要工作人员采取相应的措施。
50.本发明的较佳的实施例中,检测单元232包括:
51.检测子单元2321,用于根据实际检测项目对各渗漏样本分别进行检测得到对应的渗漏检测结果;
52.判断子单元2322,连接检测子单元2321,用于在渗漏检测结果表示可疑渗漏点存在一危险废物的渗漏现象时,将对应的可疑渗漏点作为一待处理渗漏点保存;
53.报告处理子单元2323,连接判断子单元2322,用于根据待处理渗漏点处理生成巡检报告。
54.具体地,本实施例中,标准检测项目设置有多项,当刚性填埋场内填埋的危险废物不同时,对应需要选用的标准检测项目不同。
55.在各标准检测项目中,根据当前刚性填埋场内填埋的危险废物选取对应的标准检测项目,并作为实际检测项目对渗漏样本进行样本检测。
56.各标准检测项目包括但不限于:渗漏样本的酸碱度检测、变色反应等。
57.本发明的较佳的实施例中,危险废物具有对应的典型特征物相,将典型特征物相作为一标准指纹特征,则检测子单元2321用于根据实际检测项目检测渗漏样本中的物相成分,并根据物相成分及标准指纹特征处理得到渗漏检测结果;
58.则判断子单元2322用于在渗漏检测结果表示存在物相成分中与标准指纹特征相匹配时,渗漏检测结果表征可疑渗漏点存在危险废物的渗漏现象,并将对应的可疑渗漏点作为待处理渗漏点保存。
59.本发明的较佳的实施例中,巡检机器人1还配置有一信标箱,信标箱内放置有多个信标,则检测单元232还包括一控制子单元2324,控制子单元2324连接判断子单元2322,用于在巡检机器人1的巡检过程中,控制巡检机器人1在可疑渗漏点处放置信标,以供工作人员定位各可疑渗漏点并进行检查。
60.本发明的较佳的实施例中,还包括一中央控制平台3,分别连接各巡检机器人1及机器人驿站2,中央控制平台3包括一中央数据中心31,中央数据中心31用于实时获取巡检报告及各巡检机器人1的工作状态并展示。
61.本发明的较佳的实施例中,巡检机器人1配置有多组气体传感器,则中央控制平台3还包括一第一远程监控单元32,用于根据外部输入的探测指令控制巡检机器人1在行走过程中驱动气体传感器进行气体检测以得到在气体传感器的检测范围内的各类危害气体的浓度值并输出;
62.则样本检测模块23根据各危害气体的浓度值及渗漏检测结果处理生成巡检报告并保存。
63.具体地,本实施例中,气体传感器装载于巡检机器人1上,巡检机器人1根据探测指令,对巡检区域内危害气体的浓度进行检测,得到刚性填埋场内各类危害气体的浓度值,工作人员在进入对应的巡检区域前,根据气氛检测结果提前采取防护措施,以降低工作风险,保障生理健康。
64.本发明的较佳的实施例中,中央控制平台3还包括一第二远程监控单元33,用于根据外部输入包含一目的地的一引导指令控制巡检机器人1引导工作人员到达目的地。
65.具体地,本实施例中,工作人员通过移动用户端122选择需要处理的渗漏点,巡检机器人1根据当前的位置信息及渗漏点在刚性填埋场中的位置信息处理得到两个位置之间的最短路径,并沿着最短路径以步行速度前进,工作人员跟随巡检机器人1即可抵达渗漏点。
66.本发明的较佳的实施例中,中央控制平台3还包括一第三远程监控单元34,用于根据外部输入包含至少一执行动作的一控制指令控制巡检机器人1执行各执行动作。
67.具体地,本实施例中,第一远程监控单元32、第二远程监控单元33及第三远程监控单元34集成于一处理器中。
68.巡检机器人1具有多种工作模式,包括:
69.巡检模式:巡检机器人1按照设定的路线及巡检速度进行智能巡检,其中巡检速度低于6公里/小时,起到降低采集到的巡检图像模糊程度的作用;
70.远程模式:工作人员使用用户端与处理器建立通讯并通过用户端发送各项远程指令,巡检机器人1响应于各远程指令;
71.引导模式:工作人员使用一用户端与处理器建立通讯,向巡检机器人1发送目的地对应的坐标,巡检机器人1根据坐标规划引导路径,并沿着引导路径带领工作人员到达取样坐标,此时巡检速度为符合成人步行的速度;
72.探测模式:巡检机器人1在刚性填埋场对应的巡检区域内进行随机点移动,进行各类危害气体的浓度值检测。
73.在引导模式中,工作人员跟随巡检机器人1到达取样坐标处后,通过分辨信标即可确认可疑渗漏点的位置,提高了工作人员处理渗漏点的效率。
74.本发明的较佳的实施例中,中央控制平台3还包括一渗漏预测单元35,连接中央数据中心31,渗漏预测单元35包括:
75.提取子单元351,用于获取刚性填埋场在预设的一时间段内生成的所有巡检报告,根据巡检报告提取得到各检测渗漏点,并将检测渗漏点作为一历史渗漏点保存;
76.渗漏预测子单元352,连接提取子单元351,用于根据刚性填埋场的建筑图纸构建一填埋场模型,并根据各历史渗漏点及填埋场模型处理得到对应的渗漏高发区域,以供工作人员根据渗漏高发区域对刚性填埋场进行维护。
77.机器人驿站2内设置有多个自动充电桩,巡检机器人1根据自身的一剩余能源值及自身的当前位置信息规划由自身的当前位置到自动充电桩的返程路径,并根据预先配置的一巡检速度及返程路径处理得到一最低能耗值;随后,根据最低能耗值及剩余能源值处理得到一能源差值,并在能源差值小于预设的一能源阈值时停止巡检并沿返程路径返回至机器人驿站2内的自动充电桩处以充能,,降低巡检机器人1因能源不足而滞留在巡检区域内的几率,提高了巡检机器人1的可靠性。
78.综上,多个巡检机器人1在刚性填埋场内沿着巡检路径检测沿途可能存在的可疑渗漏点,与凭借工作人员的主观意见判断得到渗漏点的方式相比,根据可疑渗漏点中各有机物的实际组分含量初步筛选得到可疑渗漏点并根据渗漏样本得到渗漏检测结果判断可疑渗漏点是否确实存在危险废物渗漏的方式更具可靠性,工作人员根据巡检报告可直接前往可疑渗漏点的取样坐标以处理可疑渗漏点,提高了巡检效率,降低了工作人员的工作强度。
79.在人工判断渗漏点时,需要检测所有渗漏点的渗漏样本,本发明的智能巡检系统中,通过对可疑渗漏点进行层层筛选,有效地减少了需要进行样本检测的渗漏样本数量,降低了智能巡检的成本。工作人员进入刚性填埋场时,根据巡检报告中的各类危害气体的浓度值采取对应的防护措施,降低了工作风险。
80.以上所述仅为本发明较佳的实施例,并非因此限制本发明的实施方式及保护范围,对于本领域技术人员而言,应当能够意识到凡运用本说明书及图示内容所作出的等同替换和显而易见的变化所得到的方案,均应当包含在本发明的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。