1.本发明涉及空间光学探测技术领域,尤其涉及一种轻量小型化望远镜、制备方法以及成像方法。
背景技术:
2.随国际空间站、空间卫星的发展,具有高精度、高时效和远距离的广域监视与探测能力,已成为复杂空中环境下弱目标及早发现、快速检测和跟踪识别的重要发展方向之一。
3.针对轻量化、小型化、高灵敏度探测的轻量小型化望远镜的研究需求正日益迫切,大视场和小型化将是空间光学探测系统发展的必然趋势。然而,传统的空间光学系统如可展开式望远镜,其体积和质量大、成本高,需要复杂的机械结构和精密控制结构,增大了复杂度、质量和功耗,难以满足空间光学探测的需求。
技术实现要素:
4.(一)要解决的技术问题
5.鉴于现有技术的上述缺点、不足,本发明提供一种轻量小型化望远镜及其制备方法,其解决了现有光学系统体积和质量过大且成本过高的技术问题。
6.(二)技术方案
7.为了达到上述目的,本发明采用的主要技术方案包括:
8.第一方面,本发明实施例提供一种轻量小型化望远镜,所述望远镜包括:沿同一光轴依次设置的用于接收目标光源的光线并抑制杂散光的消杂散光模块(1)、用于收集经抑制杂散光后的光线的入射光收集模块(2)、用于对收集的光线进行会聚的聚焦成像模块(3)以及用于将会聚的光线形成相应图像的成像探测器模块(4);
9.所述消杂散光模块(1)包括第一渐缩管和第一光学组件,所述第一渐缩管的直径从第一端朝第二端逐渐缩小,所述第一光学组件设置于所述第一渐缩管的第二端;
10.所述入射光收集模块(2)包括同轴依次对接的第二渐缩管、第一直管、第三渐缩管、第二直管以及第二光学组件;所述第二渐缩管的第一端连接所述第一渐缩管的第二端,所述第二渐缩管的第二端连接所述第一直管的第一端,所述第一直管的第二端连接所述第三渐缩管的第一端,所述第三渐缩管的第二端连接所述第二直管的第一端;且所述第二渐缩管的直径从第一端朝第二端逐渐缩小,所述第三渐缩管的直径从第一端朝第二端逐渐缩小;所述第二光学组件设置于所述第二渐缩管、第一直管、第三渐缩管以及第二直管之中的任意一个之内;
11.所述聚焦成像模块(3)包括第三直管以及设置于所述第三直管内的第三光学组件,所述第三直管的第一端连接所述第二直管的第二端;
12.所述成像探测器模块(4)设置于所述第三直管的第二端。
13.可选地,
14.所述入射光收集模块(2)设置有若干第一定位阶梯,所述第一定位阶梯能够一一
对应支撑所述第一光学组件;
15.和/或,
16.所述第二渐缩管、所述第一直管、所述第三渐缩管均设置有第二定位阶梯,所述第二定位阶梯能够一一对应支撑所述第二光学组件;
17.所述第一光学组件和所述第二光学组件均包括镜座和设置于所述镜座上的光学镜片。
18.可选地,所述消杂散光模块(1)、入射光收集模块(2)、聚焦成像模块(3)和成像探测器模块(4)依次通过螺纹旋合对接固定;
19.其中,公螺纹为拉伸右旋,母螺纹为剪切右旋,螺纹深度为8~12mm。
20.可选地,所述成像探测模块(4)包括第四渐缩管和设置于所述第四渐缩管内的ccd相机和coms相机。
21.可选地,所述第一渐缩管、所述第二渐缩管、所述第一直管、所述第三渐缩管、所述第二直管、所述第三直管以及第四渐缩管均为碳纤维材料。
22.可选地,所述第二渐缩管的第一端的直径大小为180~220mm。
23.可选地,所述轻量小型化望远镜的总长为520~530mm,最大直径为215~225mm,总质量为590~610g。
24.第二方面,本发明实施例提供一种如上所述的轻量小型化望远镜的制备方法,包括:
25.依据光学镜片的大小、数量、排列方式、镜筒材料的热膨胀系数以及光学元件和镜筒结构之间的装配公差,确定轻量小型化望远镜的初步机械结构;
26.对所述初步机械结构依次进行3d建模和3d打印得到3d实体模型,对所述3d实体模型采用包含有限元分析和力学分析的综合分析;
27.基于所述综合分析的结果,判断所述初步机械结构是否满足预设的性能要求;
28.若没有满足所述性能要求,则对所述初步机械结构进行改进和参数优化调整,得到轻量小型化望远镜的机械结构;
29.若满足所述性能要求,则将所述初步机械结构作为轻量小型化望远镜的机械结构;
30.其中,所述性能要求包括:机械结构的厚度小于5mm、质量小于1000g以及口径不小于200mm。
31.可选地,对所述初步机械结构依次进行3d建模和3d打印得到3d实体模型包括:
32.通过solidworks软件绘制所述初步机械结构的各个模块的二维图形草图,经绕轴心旋转得到草图的旋转体,再绘制各个模块的螺纹线,然后将各个模块组合得到三维模型;
33.选取打印耗材,并使用切片软件jgcreat对所述三维模型进行切片;
34.依据选取的打印耗材和所述三维模型的各个切片,通过3d打印机打印出3d实体模型。
35.其中,所述3d打印机型号为极光尔沃-a8s,所述打印耗材为聚乳酸pla。
36.第三方面,本发明实施例提供一种轻量小型化望远镜的成像方法,应用于如上所述的轻量小型化望远镜,
37.所述轻量小型化望远镜的第一光学组件采用微光学透镜,当入射光波长为λ时,微
光学透镜的透过率函数t(r)为:
[0038][0039][0040]
r2=(x-x0)2 (y-y0)2ꢀꢀꢀ
(3)
[0041]
式中:f0为微光学透镜焦距,i为虚部因子,λ0为预设波长,k为波矢,(x0,y0)为光心,(x,y)为透镜上任意一点,r为透镜上任意一点到光心的距离,α为波长匹配因子,n(λ)为折射率函数,微光学透镜调制的点扩散函数在焦平面上的强度分布i(ρ)为:
[0042][0043]
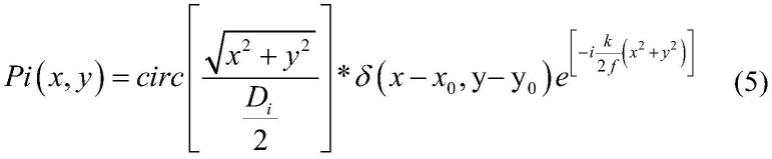
式中:ρ为焦平面径向坐标,r为出瞳半径,j0为零阶bessel函数,经过采用传统折射透镜的第二光学组件和第三光学组件后,光传递函数pi(x,y)为:
[0044][0045]
式中:di为透镜直径,circ为圆孔函数,δ为狄拉克函数,f为透镜焦距。
[0046]
(三)有益效果
[0047]
本发明的有益效果是:本发明提出一种轻小型望远镜的机械结构及设计方法,采用模块化拼装方式,前三个模块构成光学望远系统直接安装成像探测器的前端,模块化的拼装方式便于增减模块,增大功能器件和结构的设计、加工和组装自由度。本发明质量大幅度减轻,整体质量和整体尺寸较小,系统功耗仅为成像探测器功耗。
附图说明
[0048]
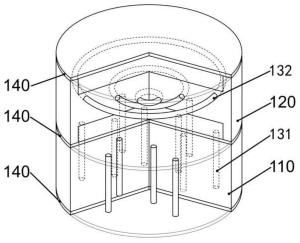
图1为本发明实施例提供的一种轻量小型化望远镜的结构示意图;
[0049]
图2为本发明实施例提供的一种轻量小型化望远镜的定位阶梯示意图;
[0050]
图3为本发明实施例提供的一种轻量小型化望远镜的消杂散光模块示意图;
[0051]
图4为本发明实施例提供的一种轻量小型化望远镜的入射光收集模块示意图;
[0052]
图5为本发明实施例提供的一种轻量小型化望远镜的聚焦成像模块示意图;
[0053]
图6为本发明实施例提供的一种轻量小型化望远镜的成像探测器模块示意图;
[0054]
图7为本发明实施例提供的一种轻量小型化望远镜的制备方法的流程示意图;
[0055]
图8为本发明实施例提供的一种轻量小型化望远镜的制备方法的3d建模和3d打印的具体流程示意图;
[0056]
图9是本发明实施例提供的一种轻量小型化望远镜的制备方法的对三维模型仿真
得到的有限元分析图;
[0057]
图10是本发明实施例提供的一种轻量小型化望远镜的制备方法的对三维模型仿真得到的应力分析图;
[0058]
图11是本发明实施例提供的一种轻量小型化望远镜的制备方法的对三维模型仿真得到的热力分析图;
[0059]
图12是本发明实施例提供的一种轻量小型化望远镜的制备方法的通过3d打印得到的3d实体模型;
[0060]
图13是本发明实施例提供的一种轻量小型化望远镜的制备方法的八片式光学镜片组仿真得到的成像性能。
[0061]
【附图标记说明】
[0062]
1:消杂散光模块;
[0063]
2:入射光收集模块;
[0064]
3:聚焦成像模块;
[0065]
4:成像探测器模块;
[0066]
5:第一定位阶梯;
[0067]
6:第二定位阶梯。
具体实施方式
[0068]
为了更好地解释本发明,以便于理解,下面结合附图,通过具体实施方式,对本发明作详细描述。
[0069]
如图1所示,本发明实施例提出一种轻量小型化望远镜,望远镜整体采用单目直筒型结构,包括:沿同一光轴依次间隔设置的用于接收目标光源的光线并抑制杂散光的消杂散光模块1、用于收集经抑制杂散光后的光线的入射光收集模块2、用于对收集的光线进行会聚的聚焦成像模块3以及用于将会聚的光线形成相应图像的成像探测器模块4。具体实现过程为:目标光源经消杂散光模块1抑制杂散光后,由200mm大口径的入射光收集模块2收集,在聚焦成像模块3中对入射光会聚,最终在成像探测器模块4中由ccd相机成像。
[0070]
消杂散光模块1包括第一渐缩管和第一光学组件,第一渐缩管的直径从第一端朝第二端逐渐缩小,第一光学组件设置于第一渐缩管的第二端,消除杂散光模块1即遮光罩部分,能够很好地抑制杂散光,相较挡光环设计,质量大幅度减轻,整体质量和整体尺寸较小,系统功耗仅为成像探测器功耗;入射光收集模块2包括同轴依次对接的第二渐缩管、第一直管、第三渐缩管、第二直管以及第二光学组件;第二渐缩管的第一端连接第一渐缩管的第二端,第二渐缩管的第二端连接第一直管的第一端,第一直管的第二端连接第三渐缩管的第一端,第三渐缩管的第二端连接第二直管的第一端;且第二渐缩管的直径从第一端朝第二端逐渐缩小,第三渐缩管的直径从第一端朝第二端逐渐缩小;第二光学组件设置于第二渐缩管、第一直管、第三渐缩管以及第二直管之中的任意一个;聚焦成像模块3包括第三直管以及设置于第三直管内的第三光学组件,第三直管的第一端连接第二直管的第二端;成像探测器模块4设置于第三直管的第二端。
[0071]
本发明提出一种轻小型望远镜的机械结构及设计方法,采用模块化拼装方式,前三个模块构成光学望远系统直接安装成像探测器的前端,模块化的拼装方式便于增减模
块,增大功能器件和结构的设计、加工和组装自由度。本发明质量大幅度减轻,整体质量和整体尺寸较小,系统功耗仅为成像探测器功耗。
[0072]
为了更好地理解上述技术方案,下面将参照附图更详细地描述本发明的示例性实施例。虽然附图中显示了本发明的示例性实施例,然而应当理解,可以以各种形式实现本发明而不应被这里阐述的实施例所限制。相反,提供这些实施例是为了能够更清楚、透彻地理解本发明,并且能够将本发明的范围完整的传达给本领域的技术人员。
[0073]
其中,入射光收集模块2和聚焦成像模块3均设置有用于支撑各独立镜座的若干定位阶梯,定位阶梯的数量和在镜筒中的位置由轻量小型化望远镜的光学设计要求决定。入射光收集模块2设置有若干第一定位阶梯5,第一定位阶梯5能够一一对应支撑第一光学组件;和/或,第二渐缩管、第一直管、第三渐缩管均设置有第二定位阶梯6,第二定位阶梯6能够一一对应支撑第二光学组件;第一光学组件和第二光学组件均包括镜座和设置于镜座上的光学镜片。
[0074]
整个机械结构的旋转对称中心位于光轴,内部设有定位阶梯、镜座、镜筒内螺纹和螺纹压壁,能够可靠地固定光学透镜,各个模块之间通过螺纹旋合固定,便于拆卸,并且可根据需要增加移动螺纹,实现调焦功能
[0075]
接着,消杂散光模块1、入射光收集模块2、聚焦成像模块3和成像探测器模块4依次通过螺纹旋合对接固定;其中,公螺纹为拉伸右旋,母螺纹为剪切右旋,螺纹深度为8~12mm,优选为10mm。
[0076]
继而,成像探测模块4包括第四渐缩管和设置于第四渐缩管内的ccd相机和coms相机。
[0077]
然后,第一渐缩管、第二渐缩管、第一直管、第三渐缩管、第二直管、第三直管以及第四渐缩管均为碳纤维材料。且第二渐缩管的第一端的直径大小为180~220mm,优选为200mm。
[0078]
再者,轻量小型化望远镜的总长为520~530mm,最大直径为215~225mm,总质量为590~610g;优选地,轻量小型化望远镜的总长524.10mm,最大直径为220.36mm,总质量为600g。
[0079]
此外,本发明实施例还提供一种如上的轻量小型化望远镜的制备方法,包括:
[0080]
s1、依据光学镜片的大小、数量、排列方式、镜筒材料的热膨胀系数及光学元件和镜筒结构之间的装配公差,确定轻量小型化望远镜的初步机械结构。
[0081]
较佳地,第一光学组件中有1个光学镜片,直径为200mm,第二光学组件中有3个光学镜片,直径依次为134mm、110mm和94.71mm,第三光学组件中有4个光学镜片,直径均为74mm,所述8个光学镜片同轴排列,镜片边缘与镜筒内壁的接触长度依次为7.24mm、31.49mm、9.80mm、30mm、29.70mm、29.69mm、21.35mm和30.43mm,镜筒材料碳纤维的热膨胀系数为0.3
×
10-6
k,光学元件和镜筒结构之间的装配公差为0.05mm,确定轻量小型化望远镜的机械结构如图1所示。
[0082]
s2、对初步机械结构依次进行3d建模和3d打印得到3d实体模型,对3d实体模型采用包含有限元分析和力学分析的综合分析。
[0083]
s3、基于综合分析的结果,判断初步机械结构是否满足预设的性能要求。
[0084]
s4a、若没有满足性能要求,则对初步机械结构进行改进和参数优化调整,得到轻
量小型化望远镜的机械结构。
[0085]
s4b、若满足性能要求,则将初步机械结构作为轻量小型化望远镜的机械结构。
[0086]
其中,性能要求包括:机械结构的厚度小于5mm、质量小于1000g以及口径不小于200mm。
[0087]
上述步骤主要包括:(1)选定材料与加工工艺,针对光学系统的设计和布局,进行望远镜镜筒的机械结构设计;(2)对机械结构进行3d建模,对3d模型采用有限元分析和力学分析等综合分析,验证机械结构是否满足空间光学探测系统的性能要求;(3)对没有满足空间光学探测系统要求的地方,进行结构改进和参数优化调整,最终经整体确认,得到轻小型望远镜的机械结构。
[0088]
进一步地,对初步机械结构依次进行3d建模和3d打印得到3d模型包括:
[0089]
s21、通过solidworks软件绘制初步机械结构的各个模块的二维图形草图,经绕轴心旋转得到草图的旋转体,再绘制各个模块的螺纹线,然后将各个模块组合得到三维模型。
[0090]
s22、选取打印耗材,并使用切片软件jgcreat对三维模型进行切片。
[0091]
s23、依据选取的打印耗材和三维模型的各个切片,通过3d打印机打印出3d实体模型。
[0092]
较佳地,3d打印机型号为极光尔沃-a8s,打印耗材为聚乳酸pla。
[0093]
在具体的实施例中,图10是对望远镜结构的3d模型仿真得到的应力分析图,可以看出结构的应力变化较小,没有应力突变和应力集中现象,整体结构所受应力远小于屈服力极限。图11是对望远镜结构的3d模型仿真得到的热力分析图,对望远镜外部整体施加50℃的热力,镜筒内外施加对流,可以看出结构的热力变化较小,没有热力突变和热力集中现象,整体结构所受热力不会引起热膨胀变形。图12是通过采用上述3d打印技术,得到的一种轻小型望远镜的机械结构实物图。图13是对八片式光学镜片组仿真得到的成像性能,对系统成像能力进行分析,可以看到系统光学传递函数曲线基本接近衍射极限,不同视场情况下子午平面(t)和弧矢平面(s)光学传递函数曲线基本一致,80线对时仍有60%的分辨能力,系统性能良好。
[0094]
此外,本发明还提供一种基于本发明提出的一种轻小型望远镜的成像方法,原理如下:
[0095]
本发明的轻量小型化望远镜的成像光路利用微光学透镜与传统折射透镜的组合,利用单光路望远镜系统对目标物体进行成像,较好地,望远镜的第一光学组件采用微光学透镜,当入射光波长为λ时,微光学透镜的透过率函数t(r)为:
[0096][0097][0098]
r2=(x-x0)2 (y-y0)2ꢀꢀꢀ
(3)
[0099]
式中:f0为微光学透镜焦距,i为虚部因子,λ0为预设波长,k为波矢,(x0,y0)为光心,(x,y)为透镜上任意一点,r为透镜上任意一点到光心的距离,α为波长匹配因子,n(λ)为
折射率函数,微光学透镜调制的点扩散函数在焦平面上的强度分布i(ρ)为:
[0100][0101]
式中:ρ为焦平面径向坐标,r为出瞳半径,j0为零阶bessel函数,经过采用传统折射透镜的第二光学组件和第三光学组件后,光传递函数pi(x,y)为:
[0102][0103]
式中:di为透镜直径,circ为圆孔函数,δ为狄拉克函数,f为透镜焦距。
[0104]
综上所述,本发明提供一种轻量小型化望远镜、制备方法以及成像方法,该轻量小型化望远镜整体采用单目直筒型结构,包括:消杂散光模块1、入射光收集模块2、聚焦成像模块3和成像探测器模块4,其中:目标光源经消杂散光模块1抑制杂散光后,由大口径的入射光收集模块2收集,在聚焦成像模块3中对入射光会聚,最终在成像探测器模块4中由成像探测器成像;且的整个机械结构的旋转对称中心位于光轴上,以使透镜的球面中心同轴并位于光轴上;的四个模块之间是通过螺纹旋合连接固定;的入射光收集模块2和聚焦成像模块3均中有定位阶梯,用于支撑各独立镜座,定位阶梯的数量和在镜筒中的位置由光学系统设计要求决定;的四个镜筒结构模块在镜筒结构高度升降处全部采用斜坡式下降,以减小应力集中。
[0105]
基于上述方案,可知本发明采用一体式机械结构设计方案,保证整体系统结构的紧凑型、易搭载性和低功耗等特点。整个机械结构的旋转对称中心位于光轴,内部设有定位阶梯、镜座、镜筒内螺纹和螺纹压壁,能够可靠地固定光学透镜,各个模块之间通过螺纹旋合固定,便于拆卸,并且可根据需要增加移动螺纹,实现调焦功能;且可通过三维打印技术快速制备机械结构,成本低、易调整,适用于天文望远镜观测台、光学实验室等对望远镜系统原型样机的制作。
[0106]
在本发明的描述中,需要理解的是,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
[0107]
在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连;可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
[0108]
在本发明中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”,可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。而且,第一特征在第二特征“之上”、“上方”和“上面”,可以是第一特征在第二特征正上方或斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”,可以是
第一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度低于第二特征。
[0109]
在本说明书的描述中,术语“一个实施例”、“一些实施例”、“实施例”、“示例”、“具体示例”或“一些示例”等的描述,是指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
[0110]
尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行改动、修改、替换和变型。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。