1.本公开大体涉及敏感元件及传感器制造领域,具体涉及一种光纤光栅传感器及其制造方法。
背景技术:
2.出于对国防、航空航天、能源、环境、电力、汽车等领域的工作环境中的各种物理参数监测的需要,通常使用各种传感器来相应地对各种物理参数进行测量。
3.目前,由于光纤式传感器具有较好的隐身性,较高的测量精度和灵敏度,较快的动态响应速度、测量范围宽、本质安全、以及不受电磁波干扰等优点,逐渐被广泛运用到检测工作中,其中运用的较多的有光纤光栅传感器。
4.然而,现有的光纤光栅传感器灵敏度仍不够理想,因此需要一种能够提高测量灵敏度的光纤光栅传感器。
技术实现要素:
5.本公开有鉴于上述现有技术的状况而完成,其目的在于提供一种能够提高测量灵敏度的光纤光栅传感器及其制造方法。
6.为此,本公开提供了一种光纤光栅传感器,其包括中空管体和光纤光栅,所述中空管体包括沿轴向依次设置的第一管体、空腔部、以及第二管体,所述第一管体、所述空腔部、以及所述第二管体连续地形成,并且所述空腔部的内径大于所述第一管体和所述第二管体中任一者的内径,所述光纤光栅沿着所述中空管体的轴向延伸并且具有与所述第一管体固定连接的第一连接部、以及与所述第二管体固定连接的第二连接部,所述光纤光栅的栅区的至少一部分位于所述第一连接部与所述第二连接部之间。
7.在本实施方式所涉及的光纤光栅传感器中,当光纤光栅传感器进行测量时,能够通过空腔部来传递外部的力学参数(应力、拉力、以及压力等)变化,并且通过光纤光栅的栅区的变化来有效地反映相应的力学参数的变化,由此能够提供一种能够提高测量灵敏度的光纤光栅传感器。
8.另外,在本实施方式所涉及的光纤光栅传感器中,可选的,所述空腔部配置为受力而发生形变以使所述第一连接部与所述第二连接部之间的距离改变。在这种情况下,当第一连接部与第二连接部之间的距离改变时,能够使光纤光栅发生形变以改变栅区以使经过栅区的光信号改变,由此通过解调光信号能够有效地测量空腔部所受力的力学参数的相应变化。
9.另外,在本实施方式所涉及的光纤光栅传感器中,可选的,所述第一连接部的直径与所述第一管体的内径大致相同,所述第二连接部的直径与所述第二管体的内径大致相同。由此光纤光栅能够适配地穿设于第一管体和第二管体中。
10.另外,在本实施方式所涉及的光纤光栅传感器中,可选的,所述光纤光栅包括一个或多个栅区。由此能够根据实际应用时所需要的精确度和灵敏度选择栅区的数量。
11.另外,在本实施方式所涉及的光纤光栅传感器中,可选的,还包括以与所述光纤光栅共轴且串联的方式设置在所述中空管体外的参比光纤光栅,所述光纤光栅与所述参比光纤光栅相匹配。在这种情况下,通过参比光纤光栅对光纤光栅进行温度补偿,减少光纤光栅因在环境温度的影响下发生形变而对光纤光栅传感器的测量精确度产生的影响,由此能够提高光纤光栅传感器的测量精确度。
12.另外,在本实施方式所涉及的光纤光栅传感器中,可选的,所述中空管体由石英玻璃、金属或者有机材料制备而成。由此能够提高中空管体的耐高温能力和改善中空管体的工艺适用性。
13.本公开还提供了一种多点式光纤光栅传感器,其由多个上述中任一项所述的光纤光栅传感器串联组成。
14.在本实施方式所涉及的多点式光纤光栅传感器中,通过利用多个光纤光栅传感器串联组成多点式光纤光栅传感器中,可以对多个不同位置的物理参数进行测量。
15.另外,在本实施方式所涉及的多点式光纤光栅传感器中,可选的,各个光纤光栅的特征相互独立,经过所述多点式光纤光栅传感器的光束具有多个波长信号,并且各个波长信号分别与各个光纤光栅一一对应。在这种情况下,可以通过不同的波长信号得到所测量的物理参数。
16.另外,在本实施方式所涉及的多点式光纤光栅传感器中,可选的,经过所述多点式光纤光栅传感器的光束具有多个时间信号,并且各个时间信号分别与各个光纤光栅一一对应。在这种情况下,通过不同的时间信号所对应的光信号进行解调以获得所测量的物理参数。
17.本公开还提供了一种多点式光纤光栅传感器的制备方法,其包括准备由石英玻璃制备而成的中空管体,按预定间隔在所述中空管体上标记多个预设部位,增加所述中空管体的内部的气体压力并且对各个预设部位进行加热,以使所述中空管体在各个预设部位进行膨胀而形成多个空腔部、并且在各个空腔部两侧分别形成管道,准备具有多个栅区的光纤光栅,其中,相邻两个栅区的间距与所述预定间隔相匹配,将所述光纤光栅穿设于所述中空管体,并且将所述光纤光栅固定连接于所述管道。
18.在本实施方式所涉及多点式光纤光栅传感器的制备方法中,通过对中空管体的预设部位进行加热,使其在加热后处于熔融状态,因此,当同时在中空管体填充热膨胀性物质并且进行加压时,该预设部位的中空管体会膨胀而形成空腔部,接着将光纤光栅固定于该中空管体,并且使栅区与空腔部的位置相对应,由此能够形成多点式光纤光栅传感器。
19.根据本公开,能够提供一种能够提高测量灵敏度的光纤光栅传感器及其制造方法。
附图说明
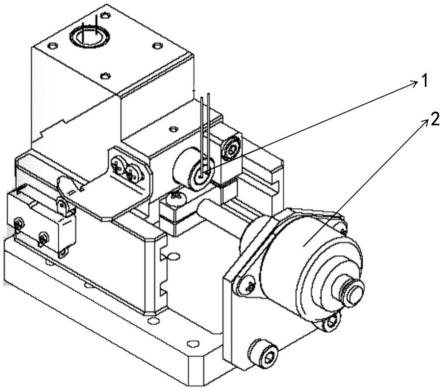
20.图1是示出了本实施方式示例所涉及的光纤光栅传感器的第一视角的立体结构示意图。
21.图2是示出了本实施方式示例所涉及的光纤光栅传感器的第二视角的立体结构示意图。
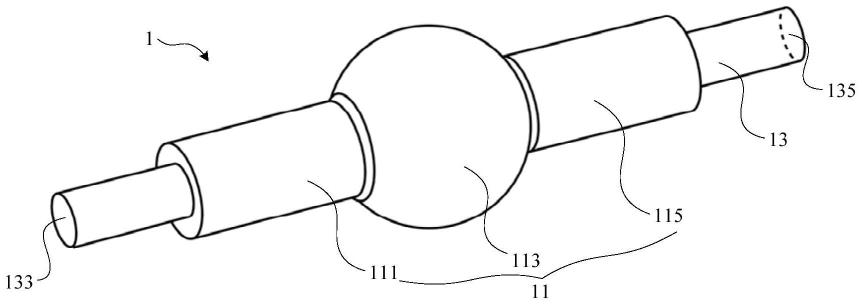
22.图3a是示出了本实施方式示例所涉及的光纤光栅传感器的中空管体的立体结构
示意图;图3b是示出了本实施方式示例所涉及的中空管体的第一变形例的立体结构示意图;图3c是示出了本实施方式示例所涉及的中空管体的第二变形例的立体结构示意图。
23.图4a是示出了本实施方式示例所涉及的光纤光栅传感器的结构示意图;
24.图4b是示出了本实施方式示例所涉及的光纤光栅传感器的第一变形例的结构示意图。
25.图5a是示出了图4a所示的中空管体沿着线x-x的截面的示意图;图5b是示出了图4b所示的中空管体沿着线y-y的截面的示意图;图5c是示出了本实施方式示例所涉及的光纤光栅传感器的第二变形例的结构示意图。
26.图6是示出了本实施方式示例所涉及的多点式光纤光栅传感器第一视角的立体结构示意图。
27.图7是示出了本实施方式示例所涉及的多点式光纤光栅传感器第一变形例的立体结构示意图。
28.图8是示出了光束在经过本实施方式示例所涉及的多点式光纤光栅传感器后的一种信号图。
29.图9是示出了光束在经过本实施方式示例所涉及的多点式光纤光栅传感器后的另一种信号图。
30.图10是示出了本实施方式所涉及的制造多点式光纤光栅传感器的流程图。
31.图11是示出了本实施方式所涉及的制造多点式光纤光栅传感器的另一种方式的流程图。
32.附图标记说明:
[0033]1…
光纤光栅传感器,2
…
多点式光纤光栅传感器,11
…
中空管体,13
…
光纤光栅,111
…
第一管体,113
…
空腔部,115
…
第二管体,133
…
第一端面,135
…
第二端面,137
…
栅区(光纤光栅),147
…
参比光纤光栅,138
…
第一连接部,139
…
第二连接部,157
…
栅区(参比光纤光栅),31
…
第一波长信号,32
…
第二波长信号,33
…
第三波长信号,41
…
第一时间信号,42
…
第二时间信号,43
…
第三时间信号。
具体实施方式
[0034]
以下,参考附图,详细地说明本公开的优选实施方式。在下面的说明中,对于相同的部件赋予相同的符号,省略重复的说明。另外,附图只是示意性的图,部件相互之间的尺寸的比例或者部件的形状等可以与实际的不同。
[0035]
需要说明的是,本公开中的术语“包括”和“具有”以及它们的任何变形,例如所包括或所具有的一系列步骤或单元的过程、方法、系统、产品或设备不必限于清楚地列出的那些步骤或单元,而是可以包括或具有没有清楚地列出的或对于这些过程、方法、产品或设备固有的其它步骤或单元。
[0036]
本公开的实施方式涉及一种光纤光栅传感器,其可以用于测量被测物受到包括拉伸、压缩、弯曲、扭转或冲击时产生的力学参数的变化,例如应力、拉力、以及压力等。此外,本公开的实施方式涉及的光纤光栅传感器还可以用于对磁、声、温度、加速度、陀螺、位移、液面、转矩、光声以及电流等物理量的测量。
[0037]
本公开的实施方式还涉及一种多点式光纤光栅传感器,其可以用于同时测量被测
物受到包括拉伸、压缩、弯曲、扭转或冲击时被测物的多个预设位置处产生的力学参数的变化,例如应力、拉力、以及压力等。此外,本公开的实施方式涉及的多点式光纤光栅传感器还可以用于对磁、声、温度、加速度、陀螺、位移、液面、转矩、光声以及电流等物理量的测量。
[0038]
本公开的实施方式还涉及一种多点式光纤光栅传感器的制造方法,其可以用于制造多点式光纤光栅传感器。
[0039]
以下,以测量力学参数(例如应力、拉力、以及压力等)为例,对本实施方式所涉及的光纤光栅传感器和多点式光纤光栅传感器进行说明。
[0040]
图1是示出了本实施方式示例所涉及的光纤光栅传感器1的第一视角的立体结构示意图。图2是示出了本实施方式示例所涉及的光纤光栅传感器1的第二视角的立体结构示意图。在图1和图2中,为了方便示意,仅表示出光纤光栅13的一部分,在实际应用中,光纤光栅13的长度可以根据实际情况确定。
[0041]
如图1和图2所示,本实施方式所涉及的光纤光栅传感器1可以包括中空管体11,以及穿设在中空管体11中的光纤光栅13。换言之,光纤光栅13可以从中空管体11的一侧插入到中空管体11并且安装(固定)于中空管体11(稍后描述)。在一些示例中,光纤光栅13可以在两侧封闭中空管体,由此在中空管体11内形成密封空间。在这种情况下,能够通过中空管体11的薄壁将外部环境的力学参数(应力、拉力、以及压力等)变化传递至光纤光栅13以使经过光纤光栅13的光信号的干涉光谱改变,从而能够通过解调干涉光谱来测量相应力学参数的变化。
[0042]
在一些示例中,光纤光栅13的第一端面133和第二端面135可以连接到外部设备例如光信号处理装置(例如光谱仪(未图示))。在这种情况下,能够将光纤光栅13所捕获的光信号进行探测和呈现(例如通过显示屏显示)。
[0043]
另外,在一些示例中,光信号处理装置也可以与光纤光栅传感器1集成在一起。在这种情况下,能够通过阅读光信号处理装置以实时地了解到光纤光栅传感器1所测量的数据。
[0044]
在一些示例中,光纤光栅13的第一端面133可以作为光信号的输入端,光纤光栅13的第二端面135可以作为光信号的输出端。另外,在一些示例中,光纤光栅13的第二端面135可以作为光信号的输入端,光纤光栅13的第一端面133可以作为光信号的输出端。
[0045]
图3a是示出了本实施方式示例所涉及的光纤光栅传感器1的中空管体11的立体结构示意图。
[0046]
如上所述,在一些示例中,光纤光栅传感器1可以包括中空管体11。
[0047]
在一些示例中,中空管体11可以为石英玻璃管。在这种情况下,能够提高中空管体11的耐高温能力并改善中空管体11的工艺适用,同时还并且能够使中空管体11具有较低的温度系数,从而降低光纤光栅传感器1受环境温度的影响。
[0048]
另外,在一些示例中,中空管体11的材料可以为金属或有机材料。
[0049]
如图3a所示,在一些示例中,中空管体11可以具有第一管体111、空腔部113、以及第二管体115。在一些示例中,第一管体111、空腔部113、以及第二管体115可以沿着中空管体11的轴线l方向依次布置。换言之,空腔部113可以设置在第一管体111与第二管体115之间,并且第一管体111、空腔部113和第二管体115可以依次连接。在这种情况下,光纤光栅13可以依次穿过第一管体111、空腔部113、以及第二管体115以穿设在中空管体11内。
[0050]
在一些示例中,第一管体111、空腔部113、以及第二管体115可以连续地形成。换言之,第一管体111、空腔部113、以及第二管体115可以形成连续的连接面。在这种情况下,能够使第一管体111、空腔部113、以及第二管体115无缝连接,从而使得当光纤光栅13封闭中空管体11的两侧时中空管体11可以形成密封空间,由此能够提高光纤光栅传感器1的测量灵敏度。
[0051]
在一些示例中,第一管体111、空腔部113、以及第二管体115可以一体成型。另外,在一些示例中,第一管体111、空腔部113、以及第二管体115可以由一根管体制成。
[0052]
在一些示例中,第一管体111的中心对称轴可以与轴线l重合。在一些示例中,第二管体115的中心对称轴可以与轴线l重合。在这种情况下,能够使光纤光栅13沿着轴线l穿过第一管体111和第二管体115,从而能够提高光纤光栅传感器1的测量精确度。
[0053]
如图3a所示,在一些示例中,空腔部113可以为大致的中空球状体。在这种情况下,空腔部113能够更加均匀地感应外部应力的变化,由此能够更进一步地提高光纤光栅传感器1的测量灵敏度。另外,在一些示例中,空腔部113可以为中空椭圆球状体。另外,在一些示例中,空腔部113也可以是其他不规则的形状。
[0054]
在一些示例中,空腔部113可以是绕轴线l旋转而形成的旋转对称结构。在这种情况下,空腔部113能够均匀地感应外部应力的变化,从而提高光纤光栅传感器1的测量灵敏度和准确度。
[0055]
在一些示例中,空腔部113的壁厚可以小于第一管体111的壁厚。在一些示例,空腔部113的壁厚可以小于第二管体115的壁厚。在这种情况下,可以使空腔部113的壁厚小于第一管体111和第二管体115中任意一个管体的壁厚,由此在受到外力作用时空腔部113能够灵敏地感应到外部被测力学参数的变化,从而能够提高光纤光栅传感器1的测量灵敏度。
[0056]
在一些示例中,空腔部113的内径可以大于第一管体111的内径。在一些示例中,空腔部113的内径可以大于第二管体115的内径。在这种情况下,可以使空腔部113的内径大于第一管体111和第二管体115中任意一个管体的内径,由此在受到外力作用时空腔部113能够灵敏地感应到外部被测力学参数的变化,从而能够提高光纤光栅传感器1的测量灵敏度。
[0057]
在一些示例中,空腔部113的中央的壁厚可以小于空腔部113的两端的壁厚。在一些示例中,空腔部113的壁厚可以从中央到两端逐渐变厚。
[0058]
图3b是示出了本实施方式示例所涉及的中空管体11的第一变形例的立体结构示意图。
[0059]
在一些示例中,中空管体11可以具有多个空腔部113。例如:空腔部113的数量可以为2个、3个、或4个等。在这种情况下,可以根据实际应用时所需要的灵敏度和精确度来选择空腔部113的个数。
[0060]
在图3b所示的实施例中,空腔部113可以包括空腔部113a和空腔部113b。在这种情况下,中空管体11在受到外力作用时空腔部113可以更灵敏地感应到被测力学参数的变化,从而能够提高光纤光栅传感器1的测量灵敏度。
[0061]
如图3b所示,在一些示例中,空腔部113a和空腔部113b可以具有完全相同的形状。在一些示例中,空腔部113a的大小可以与空腔部113b的大小相同。
[0062]
如图3b所示,在一些示例中,空腔部113a与空腔部113b可以按预定间隔设置。
[0063]
另外,在一些示例中,空腔部113a可以与空腔部113b部分重叠。
[0064]
图3c是示出了本实施方式示例所涉及的中空管体11的第二变形例的立体结构示意图。
[0065]
如图3c所示,在一些示例中,空腔部113可以是波纹管。在这种情况下,空腔部113可以更灵敏的感应到被测力学参数的变化,从而提高光纤光栅传感器1的测量灵敏度。
[0066]
另外,在一些示例中,当中空管体11的材料为金属时,空腔部113可以是波纹管。
[0067]
图4a是示出了本实施方式示例所涉及的光纤光栅传感器1的结构示意图;
[0068]
图4b是示出了本实施方式示例所涉及的光纤光栅传感器1的第一变形例的结构示意图。
[0069]
如上所述,在一些示例中,光纤光栅传感器1可以包括光纤光栅13。
[0070]
在一些示例中,光纤光栅13可以是均匀光纤光栅、均匀长周期光纤光栅、切趾光纤光栅、相移光纤光栅、取样光纤光栅、啁啾光纤光栅、以及大啁啾光纤光栅中的一种。在这种情况下,可以根据实际应用时的环境、灵敏度和精确度的需求具体选择光纤光栅的种类。
[0071]
如图4a,在一些示例中,光纤光栅13可以具有栅区137。在一些示例中,光信号在光纤光栅13中经过栅区137时可以相应地形成透射光、反射光和干涉光,当光纤光栅13发生形变以改变栅区137时能够使得经过栅区137的光信号发生改变,从而改变光信号的干涉光谱。在这种情况下,能够通过解调干涉光谱以测量相应的力学参数变化量。
[0072]
如图4b,在一些示例中,光纤光栅13可以具有多个栅区137。例如,栅区137的数量可以为2个、3个、或4个。在这种情况下,可以根据实际应用时所需要的灵敏度和精确度来选择栅区137的个数。
[0073]
在图4b所示的实施例中,栅区137的数量可以为两个,例如可以包括栅区137a和栅区137b。在这种情况下,能够提高光纤光栅传感器1的测量灵敏度和精确度。
[0074]
图5a是示出了图4a所示的中空管体11沿着线x-x的截面的示意图。
[0075]
如上所述,在一些示例中,光纤光栅13可以穿设在中空管体11中。
[0076]
如图5a所示,在一些示例中,光纤光栅13可以沿着中空管体11的轴线l穿设在中空管体11中。在这种情况下,能够将光纤光栅13与中空管体11同轴设置,从而能够提高光纤光栅传感器1的测量精确度。
[0077]
在一些示例中,光纤光栅13可以具有第一连接部138。在一些示例中,第一连接部138可以固定连接于第一管体111。在一些示例中,光纤光栅13可以具有第二连接部139。在一些示例中,第二连接部139可以固定连接于第二管体115。在这种情况下,光纤光栅13可以固定连接在中空管体11的两端,当被测环境的力学参数产生变化时,致使空腔部113因受力发生形变以使第一连接部138和第二连接部139之间的距离发生改变。换言之,能够通过光纤光栅13发生形变以改变栅区137进而使经过栅区137的光信号改变,从而通过解调光信号能够使光纤光栅传感器1能够有效地测量力学参数的相应变化。
[0078]
在一些示例中,光纤光栅13的第一连接部138可以固定连接于第一管体111的端部。另外,在一些示例中,光纤光栅13的第一连接部138也可以固定连接于第一管体111内。
[0079]
在一些示例中,光纤光栅13的第二连接部139可以固定连接于第二管体115的端部。另外,在一些示例中,光纤光栅13的第一连接部138也可以固定连接于第二管体115内。
[0080]
在一些示例中,光纤光栅13的第一连接部138的直径可以与第一管体111的内径大致相同。在一些示例中,光纤光栅13的第二连接部139的直径可以与第二管体115的内径大
致相同。在这种情况下,光纤光栅13可以适配地穿设于第一管体111和第二管体115。
[0081]
在一些示例中,光纤光栅13的第一连接部138可以封闭第一管体111。在一些示例中,光纤光栅13的第二连接部139可以封闭第二管体115。在这种情况下,中空管体11中可以形成密封空间,从而能够提高光纤光栅传感器1的测量灵敏度。
[0082]
另外,在一些示例中,第一连接部138可以固定连接于第二管体115。第二连接部139可以固定连接于第一管体111。
[0083]
如图5a所示,在一些示例中,光纤光栅13的栅区137可以位于中空管体11内。在一些示例中,光纤光栅13的栅区137的位置可以与空腔部113的位置相对应。在这种情况下,当被测物产生应变时,空腔部113可以灵敏地将形变传递至光纤光栅13的栅区137处,从而提高光纤光栅传感器1的灵敏度。
[0084]
如图5a所示,在一些示例中,光纤光栅13的栅区137可以位于空腔部113中。在这种情况下,可以提高光纤光栅传感器1的灵敏度。
[0085]
在一些示例中,第一连接部138可以熔接于第一管体111。在一些示例中,第二连接部139可以熔接于第二管体115。在这种情况下,能够将光纤光栅13牢固地固定于中空管体11。
[0086]
在一些示例中,光纤光栅13可以通过激光熔接的方式固定于中空管体11内。在一些示例中,第一连接部138可以通过激光熔接方式熔接固定于第一管体111。在一些示例中,第二连接部139可以通过激光熔接方式熔接固定于第二管体115。
[0087]
另外,在一些示例中,第一连接部138可以熔接于第二管体115。第二连接部139可以熔接于第一管体111。
[0088]
在一些示例中,光纤光栅13可以将来自激光设备的入射光从第一端面133传输至第二端面135。当入射光经过栅区137时可以发生干涉从而产生相应的光信号,当被测物或被测环境发生形变时,中空管体11受到的力例如拉力或挤压力,可以致使空腔部113因受力而发生形变从而使第一连接部138与第二连接部139之间的距离改变。在这种情况下,第一连接部138与第二连接部139之间的距离改变能够使得光纤光栅13的栅区137发生改变,从而改变入射光在经过栅区137时产生的光信号,并且通过解调光信号的干涉光谱,能够测量被测物或被测环境的应变量。
[0089]
图5b是示出了图4b所示的中空管体11沿着线y-y的截面的示意图。
[0090]
如上所述,在一些示例中,光纤光栅13可以具有多个栅区137。
[0091]
如图5b所示,在一些示例中,栅区137可以包括栅区137a和栅区137b。在一些示例中,栅区137a和栅区137b可以位于中空管体11内。换言之,栅区137a和栅区137b可以位于光纤光栅13的第一连接部138与光纤光栅13的第二连接部139之间。在这种情况下,能够提高光纤光栅传感器1的测量灵敏度和精确度。
[0092]
如图5b所示,在一些示例中,栅区137a可以位于空腔部113中。在一些示例中,栅区137b可以位于第二管体115中。另外,在一些示例中,栅区137b也可以位于第一管体111中。
[0093]
另外,在一些示例中,栅区137a可以位于第一管体111中。栅区137b可以位于第二管体115中。
[0094]
另外,在一些示例中,栅区137a可以位于中空管体11中。栅区137b可以位于中空管体11外。
[0095]
图5c是示出了本实施方式示例所涉及的光纤光栅传感器1的第二变形例的结构示意图。
[0096]
参见图5c,在一些示例中,光纤光栅传感器1可以包括参比光纤光栅147。参比光纤光栅147可以与光纤光栅13串联。在一些示例中,参比光纤光栅147可以与光纤光栅13同轴设置。在一些示例中,参比光纤光栅147可以设置在第一连接部138的远离空腔部113的一侧。另外,在一些示例中,参比光纤光栅147也可以设置在第二连接部139的远离空腔部113的一侧。在一些示例中,参比光纤光栅147设置在第一连接部138和第二连接部139之外。
[0097]
在一些示例中,参比光纤光栅147可以与光纤光栅13匹配。在一些示例中,参比光纤光栅147的栅区157可以与光纤光栅13的栅区137相同。在一些示例中,参比光纤光栅147的栅区157的栅格距离、以及对光的折射能力和反射能力可以与光纤光栅13的栅区137的栅格距离、以及对光的折射能力和反射能力相同。在这种情况下,由于光纤光栅13会在中空管体11的形变和环境温度的共同影响下产生形变,而参比光纤光栅147是在环境温度的影响下产生形变,因此能够通过参比光纤光栅147对光纤光栅13进行温度补偿,减少光纤光栅13因在环境温度的影响下发生形变而对光纤光栅传感器1的测量精确度产生的影响,从而提高光纤光栅传感器1的测量精确度。
[0098]
另外,在一些示例中,参比光纤光栅147可以具有多个栅区157。在一些示例中,参比光纤光栅147的各个栅区157可以相同。在一些示例中,参比光纤光栅147的各个栅区157都可以与光纤光栅13的栅区137相同。参比光纤光栅147的栅区157的数量可以为2个、3个、或4个。在这种情况下,可以根据实际应用时所需要的精确度来选择参比光纤光栅147的栅区157的个数。
[0099]
在一些示例中,光纤光栅传感器1可以具有多个参比光纤光栅147。参比光纤光栅147的数量可以为2个、3个、或4个。在这种情况下,可以根据实际应用时所需要的精确度来选择参比光纤光栅147的个数。
[0100]
如图5c所示,在一些示例中,参比光纤光栅147可以位于第二管体115的一侧。
[0101]
另外,在一些示例中,参比光纤光栅147可以位于第一管体111的一侧。
[0102]
另外,在一下示例中,多个参比光纤光栅147可以位于中空管体11的两侧。
[0103]
如上所述,本公开的实施方式还涉及一种多点式光纤光栅传感器2。
[0104]
图6是示出了本实施方式示例所涉及的多点式光纤光栅传感器2第一视角的立体结构示意图。图7是示出了本实施方式示例所涉及的多点式光纤光栅传感器2第一变形例的立体结构示意图。图8是示出了光束在经过本实施方式示例所涉及的多点式光纤光栅传感器2后的一种信号图。图9是示出了光束在经过本实施方式示例所涉及的多点式光纤光栅传感器2后的另一种信号图。
[0105]
在一些示例中,多点式光纤光栅传感器2可以由多个光纤光栅传感器1串联组成。在这种情况下,能够通过多点式光纤光栅传感器2测量多个不同位置的力学参数的变化。
[0106]
在一些示例中,多点式光纤光栅传感器2可以由多个光纤光栅传感器1串联组成。例如可以由2个、3个、或4个光纤光栅传感器1串联组成。在一些示例中,多个光纤光栅传感器1可以通过光纤光栅13串联组成多点式光纤光栅传感器2(参见图6)。在这种情况下,可以根据所需测量的力学参数的位置数量选择组成多点式光纤光栅传感器2的光纤光栅传感器的数量。
[0107]
另外,在一些示例中,多个光纤光栅传感器1的中空管体11也可以连接在一起。
[0108]
另外,如图7所示,在一些示例中,多点式光纤光栅传感器2也可以由一根中空管体11和一根光纤光栅13组成(稍后描述)。
[0109]
另外,如图7所示,在一些示例中,组成多点式光纤光栅传感器2的一个光纤光栅13可以具有多个栅区137(稍后描述)。
[0110]
以下,以多点式光纤光栅传感器2由3个光纤光栅传感器1串联组成为例,对本实施方式所涉及的多点式光纤光栅传感器2进行说明。
[0111]
如图6所示,在一些示例中,组成多点式光纤光栅传感器2可以由光纤光栅传感器1a、光纤光栅传感器1b、以及光纤光栅传感器1c组成。在一些示例中,光纤光栅传感器1a的光纤光栅13a、光纤光栅传感器1b的光纤光栅13b、以及光纤光栅传感器1c的光纤光栅13c之间的特征相互独立。在一些示例中,特征相互独立可以指各个光纤光栅的中心波长、带宽或反射率等特性不同。在一些示例中,当光束在经过光纤光栅13a、光纤光栅13b、以及光纤光栅13c后可以获得三个不同的波长信号。在这种情况下,如图8所示,当光束在经过多点式光纤光栅传感器2后,输出的光束可以具有互不相同的第一波长信号31、第二波长信号32,以及第三波长信号33,从而当被测的力学参数发生变化时,能够通过例如光信号处理装置(例如光谱仪(未图示))对光束的不同的波长信号所对应的光信号进行解调处理即可获得多点式光纤光栅传感器2所测得的不同位置的力学参数的变化。在另一些示例中,当光束在经过光纤光栅13a、光纤光栅13b、以及光纤光栅13c后也可以获得三个不同的时间信号。在这种情况下,当被测的力学参数发生变化时,能够通过解调各个时间信号所分别对应的光信号即可获得多点式光纤光栅传感器2所测得的不同位置的力学参数的变化。
[0112]
另外,在一些示例中,光纤光栅13a、光纤光栅13b、以及光纤光栅13c的特征也可以一致。在一些示例中,特征一致可以指各个光纤光栅的中心波长、带宽、以及反射率等特性相同。在一些示例中,光束在依次经过光纤光栅13a、光纤光栅13b、以及光纤光栅13c后可以获得三个不同的时间信号。在这种情况下,如图9所示,当光束在经过多点式光纤光栅传感器2时,光束依次在光纤光栅13a的栅区137a、光纤光栅13b的栅区137b、以及光纤光栅13c的栅区137c的反射下可以获得第一时间信号41、第二时间信号42、以及第三时间信号43,从而当被测的力学参数发生变化时,能够通过解调第一时间信号41、第二时间信号42、以及第三时间信号43所对应的光信号即可获得多点式光纤光栅传感器2所测得的不同位置的力学参数的变化。
[0113]
在一些示例中,光纤光栅传感器1a还可以包括第一参比光纤光栅。在一些示例中,第一参比光纤光栅的栅区可以与光纤光栅13a的栅区137a相同。
[0114]
在这种情况下,因此能够通过参比光纤光栅对光纤光栅13a进行温度补偿,从而提高多点式光纤光栅传感器2的测量精确度。
[0115]
在一些示例中,光纤光栅传感器1b还可以包括第二参比光纤光栅。在一些示例中,第二参比光纤光栅的栅区可以与光纤光栅13b的栅区137b相同。
[0116]
在这种情况下,因此能够通过参比光纤光栅对光纤光栅13b进行温度补偿,从而提高多点式光纤光栅传感器2的测量精确度。
[0117]
在一些示例中,光纤光栅传感器1c还可以包括第三参比光纤光栅。在一些示例中,第三参比光纤光栅的栅区可以与光纤光栅13c的栅区137c相同。
[0118]
在这种情况下,因此能够通过参比光纤光栅对光纤光栅13c进行温度补偿,从而提高多点式光纤光栅传感器2的测量精确度。
[0119]
如上所述,本公开的实施方式还涉及一种多点式光纤光栅传感器2的制造方法。
[0120]
图10是示出了本实施方式所涉及的制造多点式光纤光栅传感器2的流程图。以下参考图10,描述本实施方式涉及的制造多点式光纤光栅传感器2的流程。
[0121]
在一些示例中,多点式光纤光栅传感器2的制造方法可以包括准备中空管体11,并且在中空管体11的预设部位(未图示)进行标记(s100);在中空管体11内填入热膨胀性物质,并密封中空管体11的两端(s200);增加中空管体11内热膨胀性物质的压力并且对预设部位进行加热(s300);并且准备具有多个栅区137的光纤光栅13,将光纤光栅13穿设于中空管体11并且固定连接于中空管体11(s400)。
[0122]
在一些示例中,在步骤s100中,中空管体11的材料可以为石英玻璃。在这种情况下,中空管体11可以被加热熔融。
[0123]
在一些示例中,在步骤s100中,预设部位可以指的是形成空腔的位置。预设部位可以按预定间隔设置。在一些示例中,多个相邻预设部位之间的距离可以相同。另外,在一些示例中,多个相邻预设部位之间的距离可以不同。相邻预设部位之间的距离可以是0.5米、1米、1.5米、2米、2.5米、2.6米、2.7米、2.8米、2.9米、3米、3.5米、3.6米、3.7米、3.8米、3.9米、4米、或5米等。
[0124]
在一些示例中,在步骤s100中,中空管体11可以具有多个预设部位。在一些示例中,中空管体11可以具有2至10预设部位,例如2、3、4、5、6、7、8、9或10个。
[0125]
在一些示例中,在步骤s200中,热膨胀性物质可以是空气、惰性气体或易气化物质。这里,易气化物质可以例如是易气化液体。
[0126]
在一些示例中,在步骤s300中,通过对中空管体11内的热膨胀物质加热以使其膨胀,并且对预设部位加热以使预设部位被加热熔融,从而使得预设部位可以在热膨胀物质的作用下形成空腔部113,并且空腔部113两侧未被加热熔融的管道形成第一管体111和第二管体115。
[0127]
在一些示例中,在步骤s400中,光纤光栅13可以沿中空管体11的轴向设置。
[0128]
在一些示例中,在步骤s400中,相邻两个栅区137的间距可以与预设部位的预定间隔匹配。
[0129]
在一些示例中,在步骤s400中,当光纤光栅13穿设在中空管体11中时,栅区137的位置与形成的空腔部113的位置一一对应。
[0130]
在一些示例中,在步骤s400中,光纤光栅13可以具有多个栅区137。在一些示例中,光纤光栅13可以具有2至10个栅区137,例如2、3、4、5、6、7、8、9或10个。
[0131]
在一些示例中,在步骤s400中,在光纤光栅13穿设在中空管体11中后,光纤光栅13固定于空腔部113两侧未被加热熔融的管道。在一些示例中,固定的方式可以是熔接。
[0132]
在本实施方式所涉及的制造方法中,通过对中空管体11的预设部位进行加热,使其在加热后处于熔融状态,因此,当同时在中空管体11填充热膨胀性物质并且进行加压时,该预设部位的中空管体11会膨胀而形成空腔部113,接着将光纤光栅13固定于该中空管体11,并且使栅区137与空腔部113的位置相对应,由此能够形成多点式光纤光栅传感器2。
[0133]
图11是示出了本实施方式所涉及的制造多点式光纤光栅传感器2的另一种方式的
流程图。以下参考图11,描述本实施方式涉及的制造多点式光纤光栅传感器2的另一种流程。
[0134]
在本实施方式中,在制造多点式光纤光栅传感器2的另一种方法中,可以包括:首先准备中空管体11,并且对位于中空管体11的预设部位的中空管体的壁厚进行减薄(步骤s10)。此外,在本实施方式中,所准备的中空管体11可以为石英玻璃管。在这种情况下,能够保证中空管体11的耐高温能力和改善中空管体11的工艺适用性。
[0135]
在一些示例中,在步骤s10中,中空管体11可以具有多个预设部位。在一些示例中,中空管体11可以具有2至10个预设部位,例如2、3、4、5、6、7、8、9或10个。
[0136]
在一些示例中,上述预设部位可以按预定间隔排布在中空管体11上。另外,在步骤s10中减薄方法可以通过腐蚀、激光、等离子或喷砂等刻蚀等加工方法来实现。在这种情况下,能够容易地实现对中空管体的减薄。
[0137]
在步骤s10中,减薄的步骤可以包括:对中空管体11的预设部位的外壁进行图案化,以在预设部位形成刻蚀窗口;并且对图案化后的中空管体11进行刻蚀,以在预设部位形成凹槽结构,从而使预设部位的壁厚小于预设部位周围的壁厚。在这种情况下,通过刻蚀工艺来实现对中空管体11的减薄,由此能够方便地制备空腔部113。
[0138]
在步骤s10中,图案化的步骤可以包括:在中空管体11的外壁涂覆保护层;将涂覆有保护层后的中空管体11绕着中空管体11的中心轴旋转并进行掩膜刻蚀;并且对保护层进行显影,去除预设部位的保护层。在这种情况下,能够利用光刻工艺来容易地实现预设部位的选择,从而提高多点式光纤光栅传感器2制备的适用性。
[0139]
具体而言,准备涂覆有保护层的中空管体11(例如中空石英玻璃管)(未图示),接着,在保护层上粘附掩膜层(未图示)。然后,进行显影曝光,并去除中空管体11的预设部位的保护层。接着进行刻蚀(例如干法刻蚀、湿法刻蚀),从而对暴露的预设部位的中空管体11进行减薄,获得具有凹槽的中空管体11。
[0140]
在上述示例中,掩膜层可以是塑料薄膜。由此,能够方便地实现刻蚀掩膜,极大地节约刻蚀工艺的成本。另外,在另一些示例中,保护层也可以是对紫外线敏感的光刻胶。
[0141]
接着,在中空管体11填入热膨胀性物质,并密封中空管体11的两端(步骤s20)。在步骤s20中,热膨胀性物质可以为空气、惰性气体或易气化物质等。这里,易气化物质例如可以是易气化液体。
[0142]
接着,可以对中空管体11进行加热,使预设部位热膨胀而形成空腔部113,由此形成包括依次布置的第一管体111、空腔部113和第二管体115的中空管体(步骤s30)。由此,能够通过加热使预设部位热膨胀而产生所需的空腔部113。
[0143]
在本实施方式中,在完成中空管体11的制备之后,将光纤光栅137沿中空管体11的轴向穿设并固定于中空管体11(步骤s40)。
[0144]
在一些示例中,在步骤s40中,相邻两个栅区137的间距可以与预设部位的预定间隔匹配。
[0145]
在一些示例中,在步骤s40中,当光纤光栅13穿设在中空管体11中时,栅区137的位置与形成的空腔部113的位置一一对应。
[0146]
在一些示例中,在步骤s40中,光纤光栅13可以具有多个栅区137。在一些示例中,光纤光栅13可以具有2至10个栅区137,例如2、3、4、5、6、7、8、9或10个。
[0147]
在一些示例中,在步骤s40中,在光纤光栅13穿设在中空管体11中后,光纤光栅13固定于空腔部113两侧未被加热熔融的管道。在一些示例中,固定的方式可以是熔接。
[0148]
在本实施方式所涉及的制造方法中,通过在中空管体11的预设部位进行减薄,使其壁厚减小,因此,当在中空管体11填充热膨胀性物质并且进行加热时,该预设部位的中空管体11会膨胀而形成空腔部113,接着将光纤光栅13固定于该中空管体11,并且使栅区137与空腔部113的位置相对应,由此能够形成多点式光纤光栅传感器2。
[0149]
虽然以上结合附图和实施方式对本公开进行了具体说明,但是可以理解,上述说明不以任何形式限制本公开。本领域技术人员在不偏离本公开的实质精神和范围的情况下可以根据需要对本公开进行变形和变化,这些变形和变化均落入本公开的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。