一种基于bco优化的阿克曼结构无人车路径规划方法
技术领域
1.本发明属于无人车路径规划领域,具体涉及一种基于bco优化的阿克曼结构无人车路径规划方法。
背景技术:
2.近年来,无人车发展迅速,市场不断扩大。在无人车的导航任务中,无人车的路径规划是一项重要的前期工作,可以通过优化问题的最优解来实现。路径规划是无人车中的重要问题之一,它可以在起点和终点之间找到最优路径。由于其广泛的应用,得到了越来越多的研究人员的关注和迅速发展。群智能算法在解决路径规划问题中扮演着重要的角色。无人车的路径规划方法一般可以分为三类:基于节点的方法,基于采样的方法和生物启发式方法。我们受到aco的启发,并加入了甲壳虫单智能体搜索策略。
技术实现要素:
3.针对现有技术中存在的上述技术问题,本发明提出了一种基于bco(beetle colony optimization algorithm,甲壳虫群体算法)优化的阿克曼结构无人车路径规划方法,设计合理,克服了现有技术的不足,具有良好的效果。
4.为了实现上述目的,本发明采用如下技术方案:
5.一种基于bco优化的阿克曼结构无人车路径规划方法,包括如下步骤:
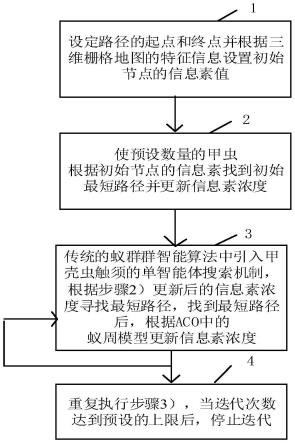
6.步骤1:设定路径的起点和终点,并根据三维栅格地图的特征信息,设置初始节点的信息素值;
7.步骤2:使预设数量的甲壳虫根据初始节点的信息素找到初始最短路径并更新信息素浓度;
8.步骤3:在传统的蚁群群智能算法中引入甲壳虫触须的单智能体搜索机制,根据步骤2更新后的信息素浓度寻找最短路径,找到最短路径后,根据aco中的蚁周模型更新信息素浓度;
9.步骤4:重复执行步骤3,当迭代次数达到预设的上限后,停止迭代。
10.优选地,步骤2中,使预设数量的甲壳虫根据初始节点的信息素找到初始最短路径并更新信息素浓度包括如下步骤:
11.步骤2.1:设置蚂蚁的数量为常数m,初始节点的信息素浓度为常数τ0,信息素挥发系数ρ=0.995,最大迭代次数为常数max;
12.步骤2.2:每只甲壳虫按照具有一定协方差的最大信息素浓度的方向之一选择去往下一个节点的方向;
13.步骤2.3:若上述的m只蚂蚁都到达终点时,则形成本次规划的路径集合;
14.步骤2.4:根据aco中的蚁周模型更新每一个节点上的信息素值。
15.优选地,在步骤3中,具体包括如下步骤:
16.步骤3.1:根据甲壳虫左边和右边的触须,在下一时刻位置的适应值,选择前往下
一个节点的方向,如公式(1)所示:
[0017][0018]
其中,x
t 1
为t 1时刻甲壳虫的位置,x
t
为t时刻甲壳虫的位置,δ为甲壳虫触须的长度,为甲壳虫的搜索方向,x
right
和x
left
分别表示甲壳虫右边和左边触须的位置,f(x
right
)和f(x
left
)分别表示右边和左边触须位置的适应值,sign为符号函数;
[0019]
步骤3.2:若步骤2.3中的m只蚂蚁都到达终点时,则形成本次规划的路径集合,信息素值更新如步骤2.4所示。
[0020]
优选地,步骤2.2中,下一个节点的方向的表达式如(2)所示:
[0021][0022]
其中,为去往下一个节点的方向,为最大的信息素值的方向,σ为协方差,rand是一个以为均值,以σ为协方差生成随机方向的函数。
[0023]
优选地,步骤2.4中,每一个节点上的信息素值的表达式如(3)所示:
[0024][0025]
其中,τx
t
x
t 1
是状态转换x
t
x
t 1
的信息素值,ρ是信息素挥发系数,δτkx
t
x
t 1
是状态转换x
t
x
t 1
时,第k只甲壳虫的信息素值。
[0026]
优选地,步骤3.1中,符号函数sign的表达式如(4)所示:
[0027][0028]
优选地,第k只甲壳虫的信息素值的更新使用蚁周模型,如(5)所示:
[0029][0030]
其中,lk为第k只蚂蚁在本次迭代中的路径长度,q为常数。
[0031]
优选地,甲壳虫在t 1时刻的位置为:
[0032][0033][0034]
其中,δ
t 1
是甲壳虫触须的长度,是由在t 1时刻的移动步长决定。
[0035]
优选地,甲壳虫的移动步长如(6)所示:
[0036]dt 1
=δ
t 1
/c
ꢀꢀꢀ
(6);
[0037]
其中,d
t 1
是t 1时刻甲壳虫的移动步长,c为常数,代表甲壳虫移动步长的长度和甲壳虫触须长度的比例,通常取为1。
[0038]
优选地,甲壳虫触须的长度是随着移动步数的增加逐渐减小的,其表达式如(7)所
示:
[0039]
δ
t 1
=δ
t
η
ꢀꢀꢀ
(7);
[0040]
其中η是常量,通常取值为0~1之间。
[0041]
本发明所带来的有益技术效果:
[0042]
本发明具有搜索范围广和搜索效率高等特点,能在三维栅格地图中找到最短路径。通过对tsp和qap问题的分析,验证了该发明的有效性。
附图说明
[0043]
图1为本发明流程图。
具体实施方式
[0044]
下面结合附图以及具体实施方式对本发明作进一步详细说明:
[0045]
一种基于bco优化的阿克曼结构无人车路径规划方法,其流程如图1所示,包括如下步骤:
[0046]
步骤1:设定路径的起点和终点,并根据三维栅格地图的特征信息,设置初始节点的信息素值;
[0047]
步骤2:使预设数量的甲壳虫根据初始节点的信息素找到初始最短路径并更新信息素浓度;包括如下步骤:
[0048]
步骤2.1:设置蚂蚁的数量为常数m,初始节点的信息素浓度为常数τ0,信息素挥发系数ρ=0.995,最大迭代次数为常数max;
[0049]
步骤2.2:每只甲壳虫按照具有一定协方差的最大信息素浓度的方向之一选择去往下一个节点的方向;下一个节点的方向的表达式如(2)所示:
[0050][0051]
其中,为去往下一个节点的方向,为最大的信息素值的方向,σ为协方差,rand是一个以为均值,以σ为协方差生成随机方向的函数。
[0052]
步骤2.3:若上述的m只蚂蚁都到达终点时,则形成本次规划的路径集合;
[0053]
步骤2.4:根据aco中的蚁周模型更新每一个节点上的信息素值。
[0054]
每一个节点上的信息素值的表达式如(3)所示:
[0055][0056]
其中,τx
t
x
t 1
是状态转换x
t
x
t 1
的信息素值,ρ是信息素挥发系数,δτkx
t
x
t 1
是状态转换x
t
x
t 1
时,第k只甲壳虫的信息素值。
[0057]
第k只甲壳虫的信息素值更新使用蚁周模型,如(5)所示:
[0058][0059]
其中,lk为第k只蚂蚁在本次迭代中的路径长度,q为常数。
[0060]
步骤3:在传统的蚁群群智能算法中引入甲壳虫触须的单智能体搜索机制,根据步骤2更新后的信息素浓度寻找最短路径,找到最短路径后,根据aco中的蚁周模型更新信息素浓度;具体包括如下步骤:
[0061]
步骤3.1:根据甲壳虫左边和右边的触须,在下一时刻位置的适应值,选择前往下一个节点的方向,如公式(1)所示:
[0062][0063]
其中,x
t 1
为t 1时刻甲壳虫的位置,x
t
为t时刻甲壳虫的位置,δ为甲壳虫触须的长度,为甲壳虫的搜索方向,x
right
和x
left
分别表示甲壳虫右边和左边触须的位置,f(x
right
)和f(x
left
)分别表示右边和左边触须位置的适应值,sign为符号函数;
[0064]
甲壳虫在t 1时刻的位置为:
[0065][0066][0067]
其中,δ
t 1
是甲壳虫触须的长度,是由在t 1时刻的移动步长决定。
[0068]
甲壳虫的移动步长如(6)所示:
[0069]dt 1
=δ
t 1
/c
ꢀꢀꢀ
(6);
[0070]
其中,d
t 1
是t 1时刻甲壳虫的移动步长,c为常数,代表甲壳虫移动步长的长度和甲壳虫触须长度的比例,通常取为1。
[0071]
甲壳虫触须的长度是随着移动步数的增加逐渐减小的,其表达式如(7)所示:
[0072]
δ
t 1
=δ
t
η
ꢀꢀꢀ
(7);
[0073]
其中η是常量,通常取值为0~1之间。
[0074]
步骤3.2:若步骤2.3中的m只蚂蚁都到达终点时,则形成本次规划的路径集合,信息素值更新如步骤2.4所示。
[0075]
符号函数sign的表达式如(4)所示:
[0076][0077]
步骤4:重复执行步骤3,当迭代次数达到预设的上限后,停止迭代。
[0078]
当然,上述说明并非是对本发明的限制,本发明也并不仅限于上述举例,本技术领域的技术人员在本发明的实质范围内所做出的变化、改型、添加或替换,也应属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。