1.本发明涉及扫描电子显微镜系统,具体涉及一种用于微观形貌观测的阵列式定位方法及装置。
背景技术:
2.扫描电子显微镜是一种通过电子与物质的相互作用成像的设备,其工作原理主要是利用高能入射电子轰击物质表面时,被激发的区域将产生二次电子,背散射电子,特征x射线等信号,基于这些信号可以获取被测样品本身的各种物理、化学性质的信息,从而获取形貌、组成、晶体结构、电子结构等图像。在对金属制品进行观察时,主要是利用背散射电子、二次电子信号成像来观察样品的表面形态,即使用极狭窄的电子束去扫描样品,通过电子束与样品的相互作用从而产生样品表面放大的形貌像。
3.值得注意的是,扫描电子显微镜的成像的分辨率高,因此,一般情况下,样品在扫描电子显微镜的工作台上进行固定,扫描电子显微镜景深大,视野大从而可以进行定位和局部区域反复观察,能够满足一般的金属形貌观察,但是对于金属腐蚀性能微观形貌观测时,由于金属腐蚀条件苛刻,且该腐蚀反应属于连续物理化学反应,因此样品的观察一般是周期性的,并且样品在观测过程中,还会进行多种环境下的腐蚀试验,观测性能试验需要每间隔一段时间观测一次某一区域的微观形貌,以便于记录相关形态变化;使得整个微观形貌观测次数超过百余次。
4.当前在实际操作过程中,由于扫描电子显微镜的成像范围广,使得定位一般是直接利用扫描电子显微镜成像后,通过对图像反馈和特定像素点进行比对,从而确定相关观测区域。然而成像定位具有一定的延迟和滞后性,在观测过程中无法有效的确定其观测区域,特别是在对腐蚀反应发生的原因鉴别处理并不高效。因此,如何更直观和高效的辅助扫描电子显微镜进行精准定位是值得研究的。
技术实现要素:
5.本发明的目的在于提供一种用于微观形貌观测的阵列式定位方法及装置,以期望改善扫描电子显微镜的成像范围广,且成像定位具有一定的延迟和滞后性,在观测过程中无法有效的确定其观测区域,特别是在对腐蚀反应发生的原因鉴别处理并不高效的问题。
6.为解决上述的技术问题,本发明采用以下技术方案:一种用于微观形貌观测的阵列式定位方法,上述方法用于扫描电子显微镜在连续性观察的定位,其特征在于:通过探测设备在样品四周象限分布,由探测设备接触样品获取前置定位信息,再通过计算机辅助系统搭建坐标系,通过扫描电子显微镜进行前置观测并记录前置观测的坐标区域;待样品取下再安装时,通过探测设备再次接触样品采集后置定位信息,通过计算机辅助系统对比后置定位信息与前置定位信息的数据差,并通过探测设备推动样品移动,使移动后的位置与前置定位信息的位置对应,再扫描电子显微镜对样品进行后置观测,使后置观测与前置观测坐标区域相同。
7.作为优选,上述前置定位信息包括x轴和y轴的定位信息;且x轴和y轴至少具有一组相互对称的探测设备,上述样品的移动由两个相对的探测设备同步进行。
8.作为优选,包括如下操作步骤:步骤a,获取样品,上述样品为金属腐蚀样本。
9.步骤b,将金属腐蚀样本固定在扫描电子显微镜和探测设备的采样区域,并确定样品当前测量倾斜角度。
10.步骤c,通过探测设备接触样品,获得前置定位信息;通过扫描电子显微镜对样品进行初次观测,得到样品初始图像。
11.步骤d,将样品从采样区域取出进行实验,实验后将样本再次放入采样区域,并确定样品当前测量倾斜角度。
12.步骤e,通过探测设备接触样品,获得后置定位信息,通过比对后置定位信息与前置定位信息的坐标差,再通过探测设备按照坐标差挪动样品,使样品挪动到与前置定位信息对应的位置,随后通过扫描电子显微镜对样品进行观测,得到变化图像,并比对初始图像,完成一次形貌比对。
13.步骤f,重复步骤d和步骤e的操作,直至完成设定次数的样品形貌比对。
14.本发明还公开了一种用于微观形貌观测的阵列式定位装置,上述定位装置用于匹配扫描电子显微镜,并使用上述的方法,上述定位装置包括基座,上述基座用于固定在扫描电子显微镜的工作台上;上述基座上端设有放置腔,上述放置腔用于放置样品;上述放置腔四周设有导轨,上述导轨中设有导块,上述导块用于在导轨中前后移动,上述导块上安装探测设备,上述探测设备在基座上呈对称象限分布,上述探测设备用于接触放置腔中的样品。
15.作为优选,上述探测设备包括载体,上述载体下端连接导块,上述载体中设有位置传感器,上述位置传感器用于采集探测设备与样品的接触信号并将信号传递给计算机辅助系统。
16.进一步的技术方案是,上述导块上设有安装孔,上述载体下端设有与安装孔对应的安装块,上述安装孔底部设有第一磁吸体,上述安装块下端第二磁吸体,上述第二磁吸体与第一磁吸体相互吸附。
17.进一步的技术方案是,上述导轨上设有刻度尺,上述导块上设有限位器,上述限位器上端从导轨上端伸出,上述限位器用于在导轨中锁紧导块。
18.进一步的技术方案是,上述基座下端设有定位板,上述定位板,上述定位板下端设有定位块,上述定位块中心与放置腔的中心重叠,上述定位板上设有辅助定位孔,上述定位块作为中心点转动基座,上述辅助定位孔用于扫描电子显微镜的工作台上锁紧基座。
19.作为优选,上述计算机辅助系统包括微处理器,上述微处理器与探测设备信号连接,上述微处理器用于对比后置定位信息与前置定位信息,上述微处理器用于输出数据到上位机,由上位机记录数据数据并将数据传递至显示器进行显示。
20.作为优选,上述导块后端设有驱动单元;上述驱动单元用于带动导块移动,上述驱动单元与微处理器信号连接,由微处理器输出信号到驱动单元并通过驱动单元带动导块移动。
21.与现有技术相比,本发明的有益效果至少是如下之一:本发明的方法主要是通过在样品和扫描电子显微镜(sem)之间搭建一个位于基座
的坐标体系,在探测设备接触样品,从而获得位置信息,样品在电子显微镜在移动或取放后,再通过探测设备获得位置信息,通过位置信息的偏差,再利用探测设备挪动样品,使得扫描电子显微镜(sem)采集区域相对应。本方法能够配合现有的扫描电子显微镜的定位,从而在观测中和观测后形成相互印证。
22.本发明通过象限分布的方式,使得探测设备的分布能够构成x轴和y轴数据,同时x轴和y轴在进行移动时,至少通过2个探测设备同步夹持移动。从而保证样品移动的稳定性,即便样品移动过程中某一路径上出现偏移,其偏移放下的探测设备也能在后续进行校正。且本发明的方法能够通过坐标体系稳定能够对应观察的,通过计算机辅助系统进行实时数据记录,从而确定原有样品姿态,达到精准定位的效果。全且方式与现有图像精准定位方式不产生冲突,对扫描电子显微镜观测表征的定位方式具有观测定位和图像补强作用。
23.本发明通过基座上的导轨约束探测设备,通过探测设备在导轨上对样品的尺寸特征进行实时采样,其采样参数相比于图像的特征矢量图识别而言,特别是在长期多次的微观测量过程中,便于观测人员快速定位。
24.同时探测设备的移动路径可控,能够通过导块带动探测设备移动,通过探测设备挪动样品至设置的尺寸位置,同时探测设备实时反馈位置信息并上发至微处理器,微处理器对应实时的尺寸数据进行匹配,相比图像的像素点匹配,以及样品腐蚀后特征矢量匹配,本发明的方法及装置能够极大的降低了参数匹配所需的数据量,使得初步定位的效率性更高。
附图说明
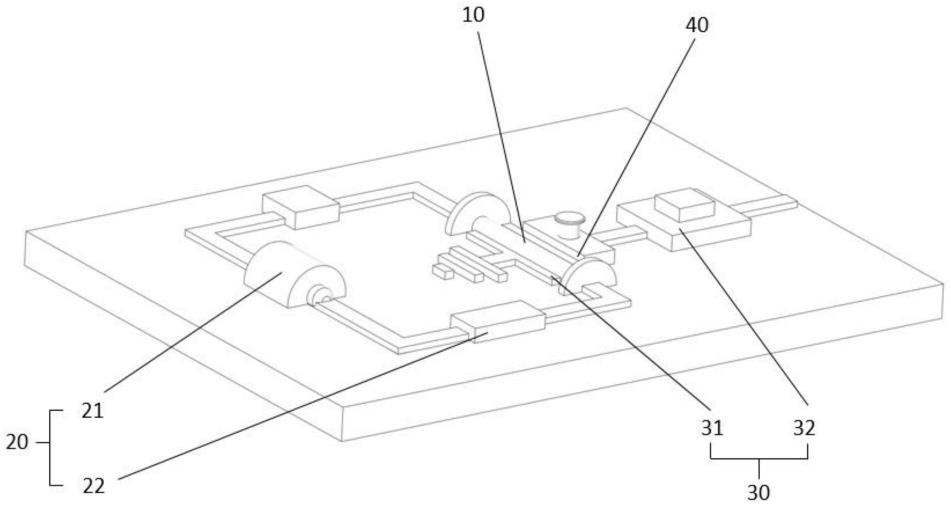
25.图1为本发明结构分布图。
26.图2为本发明安装示意图。
27.图3为导轨分布示意图。
28.图4为探测设备分布示意图。
29.图5为探测设备结构示意图。
30.图6为本发明第二磁吸体安装示意图。
31.图7为探测设备安装示意图。
32.图8为第一磁吸体与第二磁吸体吸附示意图。
33.图9为定位板底部示意图。
34.附图标记说明:1-基座、2-放置腔、3-导轨、4-导块、5-探测设备、6-限位器、101-定位板、102-定位块、103-辅助定位孔、301-刻度尺、401-安装孔、402-第一磁吸体、501-载体、502-位置传感器、503-安装块、504-第二磁吸体、q-样品、m-工作台。
具体实施方式
35.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
36.参考图1至图3所示,本发明的一个实施例是,一种用于微观形貌观测的阵列式定
位方法,上述方法用于扫描电子显微镜在连续性观察的定位,其中,扫描电子显微镜在连续性观察常见于金属腐蚀性研究,主要是用于金属样品q进行腐蚀实验;由于金属腐蚀的一般是多种原因得到综合作用,其腐蚀按照类别分为五大类,即均匀腐蚀,局部腐蚀,冶金质量引起的腐蚀,环境引起的开裂,微生物引起的腐蚀;通过扫描电子显微镜可以观察腐蚀形貌,从而分析腐蚀机理,评价材料性能。
37.通过探测设备5在样品q四周象限分布,由探测设备5接触样品q获取前置定位信息,再通过计算机辅助系统搭建坐标系,通过扫描电子显微镜进行前置观测并记录前置观测的坐标区域。其中,探测设备5分布是以样品q放置区域为中点,并均匀分布在放置区域周围的四个象限中,且探测设备5为四个,通过探测设备5对样品q形成对点关系,从而四个探测设备5接触样品q后,可以通过2探测设备5的前后相对移动,使探测设备5挪动样品q,而未移动的探测设备5具有限位作用。
38.待样品q取下再安装时,通过探测设备5再次接触样品采集后置定位信息,通过计算机辅助系统对比后置定位信息与前置定位信息的数据差,并通过探测设备推动样品移动,使移动后的位置与前置定位信息的位置对应,再扫描电子显微镜对样品进行后置观测,使后置观测与前置观测坐标区域相同。
39.其中,探测设备5第一次接触样品q后,其四个探测设备5的位置分别被记录,当样品q再次安装后,需要保证样品q的观察角度,样品q一般为规则形状物体,其观测角度可以通过基准面进行定位。通过探测设备5再次接触样品q,便可直接获得后置定位信息与前置定位信息的数据差。
40.其中,扫描电子显微镜本身能够进行高效的测量和样品表面的可视化,通过将扫描电子显微镜采集的图像进行三维重构方式,使得样品的观测结果能够精准的定位。由于电子显微镜图像结构重构均需要对图像进行特征匹配,特征目的是关联图像之间的重叠部分。若样品q的取放次数较多,观测次数频繁,样品的腐蚀性变化,可能会对重构的参数造成一定影响,使得数据处理量加大。
41.其中,扫描电子显微镜图像结构重构,主要采用阴影恢复结构技术sfs和运动恢复结构技术sfm,现有的sfs技术和sfm技术均需要使用图像进行定位和构图。单一图像恢复结构需要较多的约束条件,若图像数据较少,则定位的准确性无法充分保证。sfs技术在实际运用过程中,需要通过多张不同光照方向图像来进行重构。而sfm技术主要是利用两个视角或多个视角的图像进行重构。
42.因此,采用探测设备5进行象限定位的方式,主要是通过样品q的外部轮廓进行快速的辅助定位,该定位方式可以作为扫描电镜的图像进行处理的补强,其用于对图形定位的参数匹配,以及降低图形比对数据量,具有良好的改善,且多次取样后能够保证样品q的采样区域相同,有利于扫描电子显微镜采集的形貌特征生成特征度量图的获取。且该方法操作方便,定位精度高可适用于多种规则形状样品的快速定位。
43.基于上述实施例,本发明的另一个实施例是,上述前置定位信息包括x轴和y轴的定位信息;且x轴和y轴至少具有一组相互对称的探测设备5,上述样品的移动由两个相对的探测设备同步进行;其中x轴的定位信息,一般是两个相互对称的探测设备5同时采集到的,同理,y轴的定位信息,也是至少两个探测设备5同时采集到的。因此,定位信息由每个探测设备5的参数特征共同获得,其定位信息至少包括四个特征参数,即x轴和y轴至少两个特征
参数。
44.基于上述实施例,本发明的另一个实施例是,包括如下操作步骤,步骤a,获取样品,上述样品为金属腐蚀样本。步骤b,将金属腐蚀样本固定在扫描电子显微镜和探测设备的采样区域,并确定样品当前测量倾斜角度。步骤c,通过探测设备接触样品,获得前置定位信息;通过扫描电子显微镜对样品进行初次观测,得到样品初始图像。步骤d,将样品从采样区域取出进行实验,实验后将样本再次放入采样区域,并确定样品当前测量倾斜角度。步骤e,通过探测设备接触样品,获得后置定位信息,通过比对后置定位信息与前置定位信息的坐标差,再通过探测设备按照坐标差挪动样品,使样品挪动到与前置定位信息对应的位置,随后通过扫描电子显微镜对样品进行观测,得到变化图像,并比对初始图像,完成一次形貌比对。步骤f,重复步骤d和步骤e的操作,直至完成设定次数的样品形貌比对。
45.参考图1至图3所示,本发明的一个实施例是,一种用于微观形貌观测的阵列式定位装置,上述定位装置用于匹配扫描电子显微镜,并使用上述实施例的方法,上述定位装置包括基座1,上述基座1用于固定在扫描电子显微镜的工作台w上;其中作台w上设有多个定位孔,其基座1通过定位孔固定在作台w上。
46.上述基座1上端设有放置腔2,上述放置腔2用于放置样品;其中,基座1可以是圆形,其放置腔2为凹槽设置,从而便于放入样品q;上述放置腔2四周设有导轨3,上述导轨3中设有导块4,上述导块4用于在导轨3中前后移动,其中,导轨3截面的内部轮廓与导块4截面的外部轮廓相吻合,其导轨3截面可以是梯形结构,使得导块4在导轨3中移动具有较高的稳定性。
47.上述导块4上安装探测设备5,上述探测设备5在基座1上呈对称象限分布,上述探测设备5用于接触放置腔2中的样品。其中,探测设备5主要用于接触设备,并获得位置信号。简而言之,探测设备5首次接触样品q,传输一个接触信号,此时探测设备5在导轨3中的位置为前置位置,其四个探测设备5的x轴和y轴位置形成前置定位信息。
48.基于上述实施例,参考图4至图6所示,本发明的另一个实施例是,为了保证探测设备5的性能,上述探测设备5包括载体501,其中载体501为刚性结构,以便于载体能够推动样品q,上述载体501下端连接导块4,其载体501可以采用粘接或焊接的方式固定在导块4上,使得导块4与载体501的位置处于恒定。上述载体501中设有位置传感器502,上述位置传感器502用于采集探测设备5与样品q的接触信号并将信号传递给计算机辅助系统。由于导块4与载体501的位置恒定,通过现有的位置传感器502的接触头从载体501端面伸出并接触样品q。载体501通过在移动过程中使位置传感器502接触样品q,从而触发位置传感器502将接触信号,同时,位置传感器502将接触样品q的信号传递到计算机辅助系统。随即停止该位置传感器502对应的载体501移动。
49.进一步的,参考图4至图8所示,为了保证载体501在导块4上安装的稳定性,上述导块4上设有安装孔401,上述载体501下端设有与安装孔对应的安装块503,上述安装孔401底部设有第一磁吸体402,上述安装块503下端第二磁吸体504,上述第二磁吸体504与第一磁吸体402相互吸附。
50.其中,安装块503侧壁设有防滑层,在防滑层的作用下,通过安装孔401与安装块503可以采用过盈配合的方式进行安装,其防滑层可以是现有橡胶材质,其中,第二磁吸体504为现有的永磁体,第二磁吸体504固定在安装块503底部,通
过第二磁吸体504与第一磁吸体402相互吸附,可提高结构的刚度和可靠性。值得说明的是:若导块4为非磁性金属,则第一磁吸体402固定在安装孔401磁性金属。
51.若导块4为磁性金属材料制成,其第一磁吸体402可以是导块4的本体部分。
52.基于上述实施例,参考图3、图4和图6所示,本发明的另一个实施例是,上述导轨3上设有刻度尺301,上述导块4上设有限位器6,上述限位器6上端从导轨3上端伸出,上述限位器6用于在导轨3中锁紧导块4。其中,限位器6为螺栓结构,其导块4上设有供限位器6插入的螺孔,其限位器6上端抵触片,其限位器6在导块4的螺孔中转动,并带动限位器6上抵触片接触导轨3上端,从而使得限位器6抵触导轨3,从而限制导块4在导轨3上移动。值得注意的是,该方式适用于手动操作,其结构简单。
53.基于上述实施例,参考图1、图2、图3和图9所示,本发明的另一个实施例是,上述基座1下端设有定位板101,上述定位板101,上述定位板101下端设有定位块102,上述定位块102中心与放置腔2的中心重叠,上述定位板101上设有辅助定位孔103,上述定位块102作为中心点转动基座1,上述辅助定位孔103用于扫描电子显微镜的工作台上锁紧基座1。
54.其中,定位板101固定在基座1下端,其定位板101与基座1可以采用一体设置,定位块102为基座1和定位板101的中点,同时样品q也位于定位块102正上方,通过定位板101上的定位块102用于基座1的初次定位,而辅助定位孔103为多个,缺均匀分布在定位块102四周,通过辅助定位孔103配合定位销,在工作台w上用于基座1进行精确定位,从而对基座1上的样品检测姿态,起到一定限制作用。
55.基于上述实施例,本发明的另一个实施例是,上述计算机辅助系统包括微处理器,上述微处理器与探测设备5信号连接,上述微处理器用于对比后置定位信息与前置定位信息,上述微处理器用于输出数据到上位机,由上位机记录数据数据并将数据传递至显示器进行显示。
56.其中,微处理器为现有的mcu处理器,探测设备5采集的信号,通过探测设备5将信号传递至微处理器,由微处理器进行基础的数据计算,并同步将数据传递至上位机,由上位机记录数据数据并将数据传递至显示器进行显示,从而便于工作人员操作。
57.进一步的,上述导块4后端设有驱动单元;上述驱动单元用于带动导块4移动,上述驱动单元与微处理器信号连接,由微处理器输出信号到驱动单元并通过驱动单元带动导块4移动。其中,驱动单元可以是现有的伺服电机配合的行程气缸,其行程气缸的伸缩部件连接导块4,从而使得导块4的移动行程能够达到精准控制,其导块4的移动精度,其驱动单元的选型按照导块4的精度需求进行匹配。
58.其中微处理器可以是stm32f103的mcu处理器,stm32f103微处理器除了主要集成了存储器、中央处理器,还可以外设搭载常规的pwm 模块、正交定时单元和adc模块,以保证驱动单元启停稳定。
59.通过微处理器控制伺服电机驱动行程气缸的执行部件,从而导块4在导轨3中进行径向运动,其探测设备5在导轨3中进行径向运动过程中,探测设备5实时将位置传输到微处理器,并由微处理器控制驱动单元的启停。
60.在本说明书中所谈到的“一个实施例”、“另一个实施例”、
ꢀ“
实施例”、“优选实施例”等,指的是结合该实施例描述的具体特征、结构或者特点包括在本技术概括性描述的至少一个实施例中。在说明书中多个地方出现同种表述不是一定指的是同一个实施例。进一
步来说,结合任一实施例描述一个具体特征、结构或者特点时,所要主张的是结合其他实施例来实现这种特征、结构或者特点也落在本发明的范围内。
61.尽管这里参照本发明的多个解释性实施例对本发明进行了描述,但是,应该理解,本领域技术人员可以设计出很多其他的修改和实施方式,这些修改和实施方式将落在本技术公开的原则范围和精神之内。更具体地说,在本技术公开、附图和权利要求的范围内,可以对主题组合布局的组成部件和/或布局进行多种变型和改进。除了对组成部件和/或布局进行的变形和改进外,对于本领域技术人员来说,其他的用途也将是明显的。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。