技术特征:
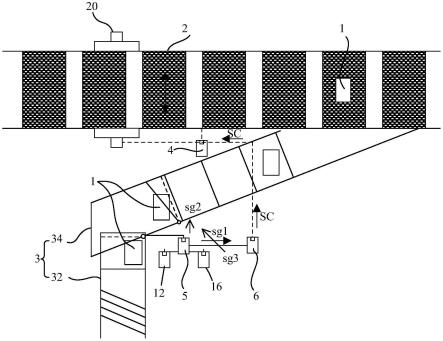
1.一种快件分拣系统,其特征在于,包括:横向传送带驱动单元(4),被配置为驱动与横向传送带(2)协作的电动机(20),所述横向传送带(2)被配置为将快件传送到相应的目的地分拣位置;配置在传送带(3)中的检测单元(5),所述传送带(3)被配置为将快件(1)移动到横向传送带(2),以输出与快件(1)的长度和横向位置相对应的检测信号;以及控制器(6),被配置为发送电机控制信号(sc),其包括电动机(20)的转速,到横向传送带驱动单元(4),基于所述检测信号,到达横向传送带(2)上的所需位置,所述传送带(3)包括第一传送带(32)和第二传送带(34),其设置在第一传送带(32)和横向传送带(2)之间,并且构造成使得其将由第一传送带(32)移动的快件移动到横向传送带,所述检测单元(5)包括长度测量传感器(12)和基准传感器(16),所述长度测量传感器(12)被配置为输出与在第一传送带(32)上移动的快件(1)的长度相对应的检测信号中的第一检测信号(sg1);在检测信号的作用下,第二检测信号(sg2),其基于快件(1)的侧面形成第一角度,并对应于快件(1)的侧面;以及基准传感器(16),被配置为输出检测信号中的第三检测信号(sg3),所述第三检测信号(sg3)基于快件(1)的一个角而形成与第一角度不同的第二角度并且对应于快件。2.根据权利要求1所述的快件分拣系统,其特征在于,所述第一检测信号(sg1)包括所述快件(1)的检测开始时间和检测结束时间。3.根据权利要求1所述的快件分拣系统,其特征在于,所述横向传送带驱动单元(4)包括:传感器(15),其被配置为感测所述电机的电机速度(m);以及电动机驱动单元(14),被配置为基于电动机控制信号来驱动和控制电动机的驱动。4.根据权利要求3所述的快件分拣系统,其特征在于,所述电动机驱动单元(14)被配置为当所述电动机被驱动时,基于所述电动机速度,根据所述电动机控制信号来检查所述电动机是否正在旋转。5.根据权利要求1所述的快件分拣系统,其特征在于,所述控制器(6)包括计算单元(132)和信号传输单元(134),所述计算单元(132)被配置为基于检测信号计算快件(1)的长度和横向位置。6.根据权利要求3或4所述的快件分拣系统,其特征在于,所述电动机驱动单元(14)被配置为基于快件(1)的长度和横向位置来确定电动机的转速和转速,并将电动机控制信号发送到所述横向传送带驱动单元(4)。7.根据权利要求1所述的快件分拣系统,其特征在于,所述检测信号包括第一检测信号(sg1),所述第一检测信号(sg1)包括快件(1)的检测开始时间和检测结束时间,基于快件(1)的侧表面并对应于快件(1)的侧表面形成第一角度的第二检测信号(sg2),以及基于快件(1)的侧面形成第二角度的第三检测信号(sg3),形成与第一角度不同的第二角度,其基于快件(1)的侧面并对应于快件(1)的侧面。8.根据权利要求5所述的快件分拣系统,其特征在于,所述计算单元(132)基于检测开始时刻和检测结束时刻的时间差以及传送带的速度,计算快件(1)的长度。9.根据权利要求5所述的快件分拣系统,其特征在于,所述计算单元(132)基于第二和第三检测信号之间的时间差以及第一和第二角度之间的角度差来计算所述快件(1)的横向位置。10.根据权利要求1所述的快件分拣系统,其特征在于,所述快件分拣系统根据快件(1)的长度和横向位置以及横向传送带(2)的设定总长度和横向传送带的移动长度来确定电动
机(20)的转速和转速,所述电动机(20)为一种具有转速功能的电动机,用以传送电动机控制信号至横向传送带驱动单元。
技术总结
本实用新型公开了一种快件分拣系统,包括横向传送带驱动单元,被配置为驱动与横向传送带协作的电动机,所述横向传送带被配置为将快件传送到相应的目的地分拣位置;配置在传送带中的检测单元,所述传送带被配置为将快件移动到横向传送带,以输出与快件的长度和横向位置相对应的检测信号;以及控制器,被配置为发送电机控制信号,其包括电动机的转速和/或转速,到横向传送带驱动单元,基于所述检测信号,到达横向传送带上的所需位置,所述传送带包括第一传送带,传送带和第二传送带。本实用新型容易确定快件的当前位置,期间不需要通过人工参与,减少了用工需求,降低了劳动强度,提高了快件分拣效率。件分拣效率。件分拣效率。
技术研发人员:王蓝蓝 杨周龙 刘小松
受保护的技术使用者:上海东普信息科技有限公司
技术研发日:2021.12.06
技术公布日:2022/7/8
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。