1.本实用新型涉及一种位置精密测量装置,特别是涉及一种微动台相对于粗动台的位置精密测量装置。
背景技术:
2.随着半导体行业的发展,对光刻机工件台的运动速度和精度都提出了更高的要求。目前光刻机运动台分为粗动台与微动台,粗动台用以实现大行程、低精度运动,微动台则实现小行程、高精度运动,微动台相对于粗动台的的位置测量,又称为微动台的相对测量,用于初始回零运动中的微动台回零、曝光/测量运动中粗动台的跟随运动和双工台交换运动中微动台的跟随运动。目前,微动台相对于粗动台的的位置测量装置结构布局较紧凑,但是在外部振源即激励源产生干扰的情况下,使位置测量装置的测量精度受到影响,进而影响光刻机工件台的运动精度。
技术实现要素:
3.本实用新型要解决的技术问题是提供一种测量精度更高、结构更协调的微动台相对于粗动台的位置精密测量装置。
4.为了解决上述技术问题,本技术提供了如下技术方案:一种微动台相对于粗动台的位置精密测量装置,所述微动台由微动台驱动电机驱动,所述微动台驱动电机包括动子及定子,还包括至少一个垂向标靶、至少一个水平标靶及至少一个位置传感器,所述垂向标靶及所述水平标靶均设置于所述定子上,所述垂向标靶呈环状间隔设置,所述水平标靶呈环状间隔布置,所述垂向标靶位于外环,所述水平标靶位于内环,所述位置传感器均设置于所述定子上,所述位置传感器分别靠近所述垂向标靶或所述水平标靶设置,所述位置传感器用于测得靠近所述位置传感器的所述垂向标靶或所述水平标靶的位置信息。
5.本实用新型微动台相对于粗动台的位置精密测量装置,其中所述垂向标靶设置有四个、所述水平标靶设置有四个。
6.本实用新型微动台相对于粗动台的位置精密测量装置,其中与所述四个垂向标靶相对应的四个所述位置传感器为四个垂向位置传感器,所述四个垂向位置传感器均垂直设置,所述四个垂向位置传感器的顶面在同一高度。
7.本实用新型微动台相对于粗动台的位置精密测量装置,其中所述定子上开设有四个安装槽,所述四个垂向位置传感器分别设置于一个所述安装槽内。
8.本实用新型微动台相对于粗动台的位置精密测量装置,其中所述四个垂向位置传感器的安装方式相同,其中一个所述安装槽内设置有安装板,所述安装板上开设有安装孔,所述垂向位置传感器穿过所述安装孔,两个开槽螺母均连接于所述垂向位置传感器上,两个开槽螺母分别位于所述安装板的上下两侧。
9.本实用新型微动台相对于粗动台的位置精密测量装置,还包括垂向定位块,所述垂向定位块可拆卸连接于所述定子上,所述垂向定位块跨过所述安装槽,所述垂向定位块
的底面为平面,所述垂向定位块的底面用于顶靠在设置于所述安装槽内的所述垂向位置传感器顶部。
10.本实用新型微动台相对于粗动台的位置精密测量装置,其中与所述四个水平标靶相对应的四个所述位置传感器为四个水平位置传感器,所述四个水平位置传感器分别安装于一个电机骨架上,各所述水平位置传感器顶部与安装所述水平位置传感器的所述电机骨架的距离相等。
11.本实用新型微动台相对于粗动台的位置精密测量装置,其中所述电机骨架上开设有安装孔,所述水平位置传感器穿过所述安装孔,两个开槽螺母连接于所述水平位置传感器上,所述两个开槽螺母分别位于所述电机骨架两侧。
12.本实用新型微动台相对于粗动台的位置精密测量装置,还包括水平定位块,所述水平定位块为l形弯折板,所述水平定位块的一侧边用于连接于所述定子上,所述水平定位块的另一侧边用于顶靠在所述水平位置传感器顶部。
13.本实用新型微动台相对于粗动台的位置精密测量装置,其中所述动子上设置有水平电机磁钢骨架及垂向电机磁钢骨架,所述四个水平标靶呈十字形,所述四个水平标靶连接于所述水平电机磁钢骨架上。
14.与现有技术相比,本实用新型微动台相对于粗动台的位置精密测量装置至少具有以下有益效果:
15.本实用新型本实用新型微动台相对于粗动台的位置精密测量装置由于包括至少一个垂向标靶、至少一个水平标靶及至少一个位置传感器,垂向标靶呈环状间隔分布于动子上,水平标靶呈环状间隔分布于动子上,垂向标靶位于外环,水平标靶位于内环,从而将垂向标靶、水平标靶分布于动子的不同位置,大范围覆盖动子,相应的设置于定子上的各位置传感器分别靠近一个垂向标靶或一个水平标靶设置,各位置传感器也分散设置,因此当外部振源产生干扰时,被干扰的位置传感器数量减小,提高位置传感器的测量精度,进而提高工件台的运动精度,同时这种内外环状布局使本实用新型微动台相对于粗动台的位置精密测量装置结构更协调。
16.下面结合附图对本实用新型微动台相对于粗动台的位置精密测量装置作进一步说明。
附图说明
17.图1为本实用新型微动台相对于粗动台的位置精密测量装置的结构示意图;
18.图2为本实用新型微动台相对于粗动台的位置精密测量装置中位置传感器的布局图;
19.图3为本实用新型微动台相对于粗动台的位置精密测量装置中水平标靶、垂向标靶的布局图;
20.图4为本实用新型微动台相对于粗动台的位置精密测量装置中垂向位置传感器的安装示意图;
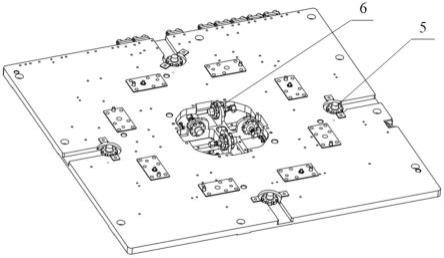
21.图5为本实用新型微动台相对于粗动台的位置精密测量装置中水平位置传感器的安装示意图;
22.图6为本实用新型微动台相对于粗动台的位置精密测量装置中水平定位块的结构
示意图;
23.图7为本实用新型微动台相对于粗动台的位置精密测量装置中垂向定位块的结构示意图;
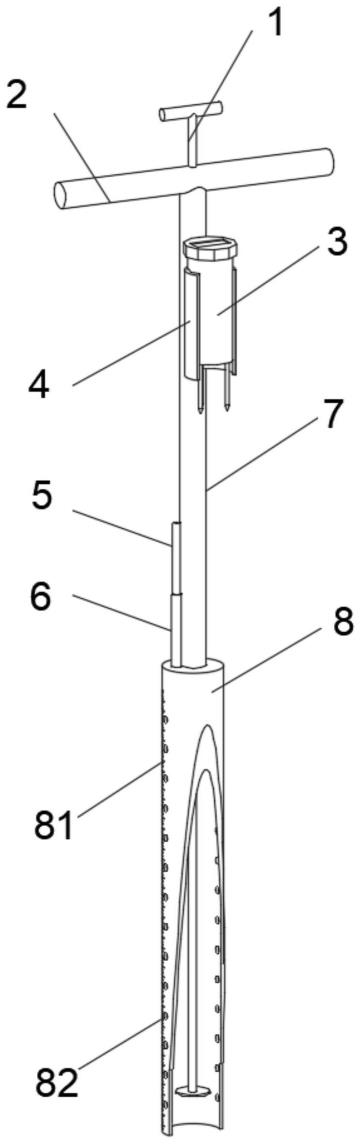
24.图8为本实用新型微动台相对于粗动台的位置精密测量装置中垂向标靶的调整工装的结构示意图。
具体实施方式
25.如图1、图2所示,本实用新型一种微动台相对于粗动台的位置精密测量装置,微动台由微动台驱动电机驱动,微动台驱动电机包括动子1及定子2,一种微动台相对于粗动台的位置测量装置包括四个垂向标靶3、四个水平标靶4及八个位置传感器,四个垂向标靶3分别设置于动子1的四个外边框上,四个垂向标靶3呈环状间隔设置,四个水平标靶4分别设置于动子1的四条内边框上,四个水平标靶4呈环状间隔布置,四个垂向标靶3位于外环,四个水平标靶4位于内环,八个位置传感器均设置于定子2上,各位置传感器分别靠近一个垂向标靶3或一个水平标靶4设置,位置传感器用于测得靠近该位置传感器的垂向标靶3或水平标靶4的位置信息。垂向标靶3、水平标靶4还可设置三个或四个以上,位置传感器与标靶一一对应。本实用新型微动台相对于粗动台的位置测量装置由于包括四个垂向标靶3、四个水平标靶4及八个位置传感器,四个垂向标靶3分别设置于动子1的四个外边框上,四个水平标靶4分别设置于动子1的四条内边框上,将垂向标靶3、水平标靶4分布于动子1的不同位置,大范围覆盖动子,相应的设置于定子2上的各位置传感器分别靠近一个垂向标靶3或一个水平标靶4设置,各位置传感器也分散设置,因此当外部振源产生干扰时,被干扰的位置传感器数量减小,提高位置传感器的测量精度,进而提高工件台的运动精度,四个垂向标靶3位于外环,四个水平标靶4位于内环,这种内外环状布局使本实用新型微动台相对于粗动台的位置精密测量装置结构更协调。
26.可选地,与四个垂向标靶3相对应的四个位置传感器为四个垂向位置传感器5,四个垂向位置传感器5均垂直设置,四个垂向位置传感器5的顶面在同一高度。由于四个垂向位置传感器5的顶面在同一高度,即垂向位置传感器5经调平,使垂向位置传感器5与垂向标靶3有近乎相同的初始距离,便于控制。
27.可选地,定子2上开设有四个安装槽21,四个垂向位置传感器5分别设置于一个安装槽21内。安装槽21的表面为经加工的平面,平面度较高,便于四个垂向位置传感器5调平。
28.可选地,四个垂向位置传感器5的安装方式相同,其中一个安装槽21内设置有安装板,安装板上开设有安装孔,垂向位置传感器5穿过安装孔,两个开槽螺母均连接于垂向位置传感器5上,两个开槽螺母分别位于安装板的上下两侧。通过旋转两个开槽螺母,调整各垂向位置传感器5的高度,从而将各垂向位置传感器5调平。
29.可选地,如图4、图7所示,还包括垂向定位块11,垂向定位块11可拆卸连接于定子2上,垂向定位块11跨过安装槽21,垂向定位块11的底面为平面,垂向定位块11的底面用于顶靠在设置于安装槽21内的垂向位置传感器5顶部。垂向定位块11为垂向位置传感器5的调平工装,通过旋转两个开槽螺母使垂向位置传感器5顶部抵靠在垂向定位块11底面上,使垂向位置传感器5顶面的高度确定,确定后将垂向定位块11拆卸。垂向定位块11的设置,使各垂向位置传感器5的调平过程更简单,调平更准确。
30.可选地,与四个水平标靶4相对应的四个位置传感器为四个水平位置传感器6,四个水平位置传感器6分别安装于一个电机骨架22上,各水平位置传感器6顶部与安装水平位置传感器6的电机骨架22的距离相等。各水平位置传感器6顶部与安装水平位置传感器6的电机骨架22的距离相等,即水平位置传感器6经调平,使水平位置传感器6与水平标靶4有近乎相同的初始距离,便于控制。
31.可选地,如图5、图6所示,电机骨架22上开设有安装孔,水平位置传感器6穿过安装孔,两个开槽螺母连接于水平位置传感器6上,两个开槽螺母分别位于电机骨架22两侧。通过两个开槽螺母调整各水平位置传感器6顶部与安装水平位置传感器6的电机骨架22的距离,调整过程简单方便。
32.可选地,还包括水平定位块12,水平定位块12为l形弯折板,水平定位块12的一侧边用于连接于定子2上,水平定位块12的另一侧边用于顶靠在水平位置传感器6顶部。旋转两个开槽螺母,使水平位置传感器6顶部抵靠在水平定位块12上,确定水平位置传感器6的位置,确定后将水平定位块12拆除。水平定位块12的设置,使各垂向位置传感器5的调平过程更简单,调平更准确。
33.可选地,如图3所示,动子1上设置有水平电机磁钢骨架7及垂向电机磁钢骨架8、9,四个水平标靶4一体成型呈十字形,四个水平标靶4连接于水平电机磁钢骨架7上。
34.四个垂向标靶3安装至动子1上时,各连接螺钉暂不拧紧,将动子1整个组件放至垂向传感器标靶调平工装13上,每个垂向标靶3的靶面对应垂向传感器标靶调平工装13的特征面14,利用该特征面14将各垂向标靶3调平。
35.可选地,八个位置传感器均采用电涡流传感器或其他类型的位置传感器。
36.以上所述的实施例仅仅是对本实用新型的优选实施方式进行描述,并非对本实用新型的范围进行限定,在不脱离本实用新型设计精神的前提下,本领域普通技术人员对本实用新型的技术方案作出的各种变形和改进,均应落入本实用新型权利要求书确定的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。