1.本发明涉及路面检测技术领域,具体为一种路面平整度检测方法及系统。
背景技术:
2.路面施工过程中,影响路面平整度的因素有很多,例如,在大厚度水泥混凝土板滑的模摊铺施工过程中,由于振捣棒功率有限,容易出现混凝土面板上下层振捣不均匀,致使板的上下密度相差很大。此外,dbi装置在插入传力杆过程中将已经挤压成型的混凝土挤出,由于周边混凝土不能流动填充空槽,在采用搓平梁对路面进行搓平和采用超级抹平板对路面进行抹平的过程中,只有砂浆可以填充空槽,因而造成集料离析,难以达到密实、平整的要求,在混凝土终凝之后,局部细集料集中的地方混凝土收缩比大,导致路面平整度下降。常用的路面基础地基的处理通过严控路基和基层的平整度对路面平整度进行控制,如采用具有声纳锁定或激光接收装置的刮刀来提高路基成型时的平整度。
3.施工过程中以及施工完成后需要对路面平整度进行检测,一般的路面平整度检测通过激光仪器进行测量,测量的方式不同,会导致测量的精确度产生误差,且测量时需要进行小范围测量,不同的范围之间同样容易产生误差,为此提供一种能够提高采样效果且能够对采样数据进行校验和修正的路面平整度检测方法及系统。
技术实现要素:
4.为此,本发明实施例提供一种路面平整度检测方法及系统,具备测量数值精确度高的优点,解决了传统测量方式误差较大的问题。
5.为了实现上述目的,本发明实施例提供如下技术方案:一种路面平整度检测方法,包括以下操作步骤:
6.s1,靶基路面检测:选择较为平整的路面作为基本面,通过全景相机录制靶基面平整度数据,对靶基面平整度数据进行提取并计算平均值,以该平均值构建基本坐标,从而提高该基本坐标的准确性;
7.s2,待测路面检测:对待测路面进行定位构建数字模型,通过第一全景相机录制待测路面平整度数据,将待测路面平整度数据进行提取,通过第二全景相机录制待测路面平整度数据,将待测路面平整度数据进行提取,第二次数据能够对第一次数据起到校验和补充的效果;
8.s3,构建坐标系:将第一全景相机和第二全景相机获取的平整度数据转换成坐标系数据,第一全景相机提取作为基本坐标系数据,第二全景相机作为补偿和校验坐标系数据,通过校验坐标系数据将基本坐标系内的异常数据进行剔除,将所获取的基本坐标系数据和补偿坐标系数据融合构成待测面三维坐标数据,并将构建三维坐标系输入数字模型内,从而构建三维模型,方便人员直观的观察路面状况;
9.s4,平整度差值确定:将三维坐标系与基本坐标进行比对,获取路面平整度偏差,并将该偏差数值和三维坐标进行提出,并将三维坐标系构建出三维路面模型,从而方便将
具有缺陷路面坐标以及缺陷程度进行准确定位。
10.优选的,在所述步骤s1和s2中,x、y向坐标值为平行待测平面坐标,z向坐标值为垂直待测平面坐标,且正向朝上,竖直为正值则为突出部位,竖直为负值则为凹陷部位,所述三维坐标的精度为um,此种表达方式方便人员直观理解。
11.优选的,在所述步骤s4中,获取的路面平整度偏差在0-15um数值内忽略不计,获取的路面平整度偏差在15-30um数值内进行标记,获取路面平整度偏差数值在30um以上进行提出。
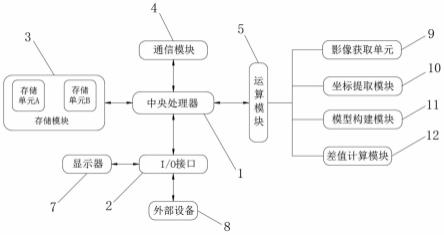
12.一种路面平整度检测方法的测量系统,包括中央处理器和i/o接口,所述中央处理器的输入端与存储模块的输出端电连接,所述存储模块的输入端与中央处理器的输出端电连接,所述中央处理器的输入端与通信模块的输出端电连接,所述通信模块的输入端与中央处理器的输出端电连接,所述中央处理器的输入端与运算模块的输出端电连接,所述运算模块的输入端与中央处理器的输出端电连接,所述i/o接口分别与显示器和外部设备电连接。
13.优选的,所述运算模块包括影像获取单元、坐标提取模块、模型构建模块和差值计算模块,所述影像获取单元用于获取待检测路面以及靶基路面的平整度数据录像,所述坐标提取模块用于对所获取的平整度数据录像坐标进行提取,所述模型构建模块用于将获取的坐标构建成三维路面模型,所述差值计算模块用于对所获取的坐标与基本坐标之间的差值进行计算。
14.优选的,所述影像获取单元包括视频获取单元、视频校验单元和视频预处理单元,所述视频获取单元为第一全景相机,所述视频检验单元为第二全景相机,所述视频预处理单元用于对异常的数据视频进行剔除。
15.优选的,所述储存模块包括储存单元a和存储单元b,所述储存单元a用于储存视频获取单元的影像数据,所述存储单元b用于存储视频校验单元的影像数据。
16.优选的,所述坐标提取模块包括数据整合模块、数据转换模块和数据修正模块,所述数据转换模块用于将获取的数据转换成数字信号,所述数据整合模块用于对视频获取单元以及视频校验单元的视频进行整合,所述数据修正模块用于对比视频校验单元对异常的数据进行修正。,
17.本发明实施例具有如下优点:该路面平整度检测方法及系统,通过全景摄像机获取路面数据,对所获取的数据进行二次校验和修正以及对未捕获的数据进行融合处理,提高采样点的目标数量,使得所获取的路面坐标数据更加准确,将数据图像转换成三维坐标数据,在再根据基准靶标对待测路面的三维数据进行对比计算,能够准确的确定待测路面的平整度,以及缺陷部位的位置坐标,从而方便后期人员对该坐标位置进行修补。
附图说明
18.为了更清楚地说明本发明的实施方式或现有技术中的技术方案,下面将对实施方式或现有技术描述中所需要使用的附图作简单地介绍。显而易见地,下面描述中的附图仅仅是示例性的,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图引伸获得其它的实施附图。
19.本说明书所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供
熟悉此技术的人士了解与阅读,并非用以限定本发明可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本发明所能产生的功效及所能达成的目的下,均应仍落在本发明所揭示的技术内容得能涵盖的范围内。
20.图1为本发明系统示意图;
21.图2为本发明影像获取单元的结构示意图;
22.图3为本发明坐标提取模块的结构示意图。
23.图中:1-中央处理器、2-i/o接口、3-存储模块、4-通信模块、5-运算模块、7-显示器、8-外部设备、9-影像获取单元、10-坐标提取模块、11-模型构建模块、12-差值计算模块、13-视频获取单元、14-视频校验单元、15-视频预处理单元、16-数据整合模块、17-数据转换模块、18-数据修正模块。
具体实施方式
24.以下由特定的具体实施例说明本发明的实施方式,熟悉此技术的人士可由本说明书所揭露的内容轻易地了解本发明的其他优点及功效,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
25.请参阅图1-3,本发明提供一种技术方案:一种路面平整度检测方法的测量系统,包括中央处理器1和i/o接口2,中央处理器1的输入端与存储模块3的输出端电连接,存储模块3的输入端与中央处理器1的输出端电连接,中央处理器1的输入端与通信模块4的输出端电连接,通信模块4的输入端与中央处理器1的输出端电连接,中央处理器1的输入端与运算模块5的输出端电连接,运算模块5的输入端与中央处理器1的输出端电连接,i/o接口2分别与显示器7和外部设备8电连接。
26.坐标提取模块包括数据整合模块16、数据转换模块17和数据修正模块18,数据转换模块17用于将获取的数据转换成数字信号,数据整合模块16用于对视频获取单元13以及视频校验单元14的视频进行整合,数据修正模块18用于对比视频校验单元对异常的数据进行修正。
27.运算模块4包括影像获取单元9、坐标提取模块10、模型构建模块11和差值计算模块12,影像获取单元9用于获取待检测路面以及靶基路面的平整度数据录像,坐标提取模块10用于对所获取的平整度数据录像坐标进行提取,模型构建模块11用于将获取的坐标构建成三维路面模型,差值计算模块12用于对所获取的坐标与基本坐标之间的差值进行计算。
28.影像获取单元9包括视频获取单元13、视频校验单元14和视频预处理单元15,视频获取单元13为第一全景相机,视频检验单元为第二全景相机,视频预处理单元用于对异常的数据视频进行剔除,储存模块3包括储存单元a和存储单元b,储存单元a用于储存视频获取单元13的影像数据,存储单元b用于存储视频校验单元14的影像数据。
29.一种路面平整度检测方法,包括以下操作步骤:
30.s1,靶基路面检测:选择较为平整的路面作为基本面,通过全景相机录制靶基面平整度数据,对靶基面平整度数据进行提取并计算平均值,以该平均值构建基本坐标,在具体实施例过程中,可以根据使用需要多次选取靶基路面进行检测,对多次获取的靶基路面进行测量后选取平均值作为基本坐标,,从而提高该基本坐标的准确性;
31.s2,待测路面检测:对待测路面进行定位构建数字模型,通过第一全景相机录制待测路面平整度数据,将待测路面平整度数据进行提取,通过第二全景相机录制待测路面平整度数据,将待测路面平整度数据进行提取,第二次数据能够对第一次数据起到校验和补充的效果;
32.s3,构建坐标系:将第一全景相机和第二全景相机获取的平整度数据转换成坐标系数据,第一全景相机提取作为基本坐标系数据,第二全景相机作为补偿和校验坐标系数据,通过校验坐标系数据将基本坐标系内的异常数据进行剔除,将所获取的基本坐标系数据和补偿坐标系数据融合构成待测面三维坐标数据,并将构建三维坐标系输入数字模型内,从而构建三维模型,方便人员直观的观察路面状况;
33.s4,平整度差值确定:将三维坐标系与基本坐标进行比对,获取路面平整度偏差,并将该偏差数值和三维坐标进行提出,并将三维坐标系构建出三维路面模型,从而方便将具有缺陷路面坐标以及缺陷程度进行准确定位。
34.在所述步骤s1和s2中,x、y向坐标值为平行待测平面坐标,z向坐标值为垂直待测平面坐标,且正向朝上,竖直为正值则为突出部位,竖直为负值则为凹陷部位,所述三维坐标的精度为um,在所述步骤s4中,获取的路面平整度偏差在0-15um数值内忽略不计,获取的路面平整度偏差在15-30um数值内进行标记,获取路面平整度偏差数值在30um以上进行提出。
35.综上所述,该一种路面平整度检测方法及系统,使用时:通过影像获取单元9,即第一全景相机和第二全景相机对靶基路面和待检测路面进行录像,将录像数据上传至储存模块3内储存,视频预处理模块15能够对异常的数据视频进出剔除,坐标提取模块10对获取的数据进行提取,即通过数据转换模块17将图像数据转换成数字信号,通过数据整合模块16对数据进行整合,并通过第二数据对第一数据进行校验,对异常的数据进行修正,同时通过数据整合模块16,将第一数据和第二数据进行融合,即第一次未捕捉的坐标信号通过第二次捕捉的数据进行补充,提高采样点的目标数量,使得所获取的路面坐标数据更加准确,通过模型构建模块11将将数据图像转换成三维坐标数据,构建三维模型,方便人员直观的观察待测路面的凹凸情况,在再根据基准靶标对待测路面的三维数据进行对比计算,负值即凹陷部位,正值即凸出部位,将异常部位的坐标进行提取,人员可以根据坐标找出缺陷部位,从而方便后期人员对该坐标位置进行修补。
36.本系统中涉及到的相关模块均为硬件系统模块或者为现有技术中计算机软件程序或协议与硬件相结合的功能模块,该功能模块所涉及到的计算机软件程序或协议的本身均为本领域技术人员公知的技术,其不是本系统的改进之处;本系统的改进为各模块之间的相互作用关系或连接关系,即为对系统的整体的构造进行改进,以解决本系统所要解决的相应技术问题。
37.虽然,上文中已经用一般性说明及具体实施例对本发明作了详尽的描述,但在本发明基础上,可以对之作一些修改或改进,这对本领域技术人员而言是显而易见的。因此,在不偏离本发明精神的基础上所做的这些修改或改进,均属于本发明要求保护的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。