1.本实用新型涉及光伏制造技术领域,特别是涉及一种旋转搬运机构及硅片生产流水线。
背景技术:
2.太阳能电池,是基于光伏效应开发出来的一种光电转换器件,目前国际光伏市场上的太阳能电池主要有晶体硅(包括单晶硅、多晶硅)、非晶/单晶异质结(hit heterojunction with intrinsic thin film)、非晶硅薄膜、碲化镉薄膜及铜铟硒薄膜太阳能电池等。太阳能电池的生产制造过程中,硅片是最主要的原材料,而最核心的工艺是通过pvd(physical vapor deposition)、pecvd(plasma enhanced chemical vapor deposition)等工艺在硅片的表面沉积一层或多层固态薄膜。
3.硅片在pecvd工序生产过程中,目前基本采用自动流水线的形式进行作业,因而需将硅片在不同设备之间进行多次相应的搬运和旋转,因此,搬运和旋转成为工艺流程中的重要环节,为了不浪费时间,通常采用同时搬运和旋转的方式来完成上述两个动作,来满足工艺和产能的需求。为了实现同时搬运和旋转两个动作,现有的旋转搬运机构通常具有至少两个电机,其中一个电机用于独立控制搬运动作,另一个电机用于独立控制旋转动作。如果需一次搬运和旋转更多的硅片,则旋转搬运机构有可能需要配置更多的电机。配置多个电机就会导致旋转搬运机构的程序相对较为复杂,生产和维护成本较高,不利于大规模地推广使用。
技术实现要素:
4.基于此,有必要针对现有的旋转搬运机构需配备至少两个电机以同时完成搬运和旋转两个动作,从而导致程序相对较为复杂,生产和维护成本较高的问题,提供一种搬运旋转机构和硅片生产流水线,旨在只需一个电机就可同时实现搬运和旋转两个动作,从而能够达到简化程序及降低生产和维修成本的目的。
5.根据本技术的一个方面,提供一种旋转搬运机构,包括:
6.驱动模块,包括能绕一沿第一方向延伸的轴线转动的输出部;
7.旋转模块,包括转盘和设置于所述转盘的传动组件,所述转盘和所述传动组件共同连接于所述驱动模块的输出部;及
8.吸附搬运模块,绕另一沿所述第一方向延伸的轴线可转动地安装于所述旋转模块的转盘,所述吸附搬运模块与所述传动组件传动连接。
9.在其中一个实施例中,所述旋转模块还包括第一连接轴,所述第一连接轴的一端连接所述传动组件,所述第一连接轴的另一端可转动地穿过所述转盘并连接所述吸附搬运模块。
10.在其中一个实施例中,所述传动组件包括第一传动轮和第二传动轮,所述第一传动轮固定安装于所述驱动模块的一端,所述第二传动轮传动连接于所述第一传动轮,并且
所述第二传动轮通过所述第一连接轴可转动地连接所述转盘;
11.所述驱动模块能够驱动所述第一传动轮绕自身轴线方向旋转,以带动所述第二传动轮在绕所述第一传动轮的轴线方向旋转的同时也绕自身轴线方向与所述第一传动轮同向旋转;
12.其中,所述第一传动轮的轴线方向与所述第二传动轮的轴线方向相互平行。
13.在其中一个实施例中,所述第二传动轮的直径是第一传动轮的直径的两倍。
14.在其中一个实施例中,所述传动组件还包括第三传动轮,所述第一传动轮、所述第二传动轮和所述第三传动轮各具有多个沿周向间隔排布的啮合齿,所述第三传动轮沿其径向方向的两端分别通过所述啮合齿啮合于所述第一传动轮和所述第二传动轮,以使所述第二传动轮能够在所述第一传动轮绕自身轴线旋转时也能够同步绕自身轴线方向同向旋转。
15.在其中一个实施例中,所述旋转模块还包括第二连接轴,所述第二连接轴的一端固定连接所述第三传动轮,所述第二连接轴的另一端可转动地连接所述转盘,以使所述第三传动轮能够在所述第一转动轮的带动下相对所述转盘绕自身轴线方向旋转。
16.在其中一个实施例中,所述传动组件还包括同步带,所述同步带的两端分别套设于所述第一传动轮和所述第二传动轮,以使所述第二传动轮能够在所述第一传动轮绕自身轴线转动时也能够同步绕自身轴线方向同向旋转。
17.在其中一个实施例中,所述吸附搬运模块包括连接架和吸盘,所述连接架固定安装于所述第一连接轴,所述吸盘固定安装于所述连接架远离所述第一连接轴的一端。
18.在其中一个实施例中,所述吸盘的一侧具有第一吸气口,所述第一吸气口用于通入气体以将硅片吸附于所述吸盘上。
19.根据本技术的另一方面,提供一种硅片生产流水线,包括如上所述的旋转搬运机构,所述旋转搬运机构能够相对所述工作台旋转,以将硅片从所述工作台的一个位置吸附并搬运至所述工作台的另一位置。
20.上述旋转搬运机构及硅片生产流水线,通过设置旋转模块、吸附搬运模块和一个驱动模块,其中旋转模块的转盘和传动组件共同连接于该驱动模块的输出部,吸附搬运模块可转动地安装于旋转模块的转盘,吸附搬运模块与传动组件传动连接。在驱动模块的驱动下,旋转模块和吸附搬运模块能够相对驱动模块共同绕一沿第一方向延伸的轴线旋转,吸附搬运模块还能够同时相对旋转模块绕另一沿第一方向延伸的轴线旋转,以吸附并搬运硅片。使得只需一个电机即可同时控制旋转模块及吸附搬运模块一次完成旋转和搬运两个动作,相比现有技术的旋转搬运机构节省了吸片—放片—吸片整个工作过程的总时长,解决了现有旋转搬运机构实现搬运和旋转的整个流程花费时间较长的问题,可以显著地提高产能,同时简化了机械结构及控制程序,也便于调试和维护,有利于大规模推广应用。
附图说明
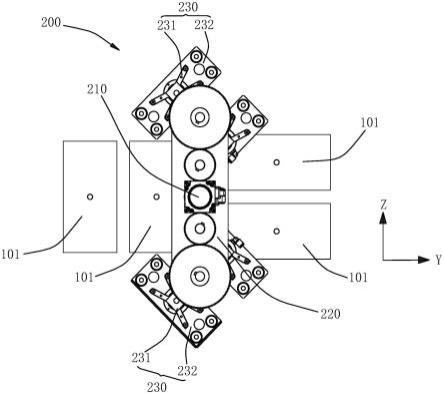
21.图1为本实用新型提供的旋转搬运机构在处于工作状态时的俯视图;
22.图2为本实用新型提供的旋转搬运机构的立体示意图;
23.图3为本实用新型提供的旋转搬运机构的正视图;
24.图4为图3中a区域的放大图;
25.图5为图2中b区域的放大图。
26.附图标记说明:
27.101、子工位;200、旋转搬运机构;210、驱动模块;211、固定部;212、输出部;220、旋转模块;221、转盘;222、传动组件;2221、第一传动轮;2222、第二传动轮;2223、第三传动轮;223、第一连接轴;224、第二连接轴;230、吸附搬运模块;231、连接架;2311、连接板;2312、子连接架;232、吸盘;2321、第一吸气口。
具体实施方式
28.为使本实用新型的上述目的、特征和优点能够更加明显易懂,下面结合附图对本实用新型的具体实施方式做详细的说明。在下面的描述中阐述了很多具体细节以便于充分理解本实用新型。但是本实用新型能够以很多不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本实用新型内涵的情况下做类似改进,因此本实用新型不受下面公开的具体实施例的限制。
29.需要说明的是,当元件被称为“固定于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。
30.除非另有定义,本文所使用的所有的技术和科学术语与属于本实用新型的技术领域的技术人员通常理解的含义相同。本文中在本实用新型的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本实用新型。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
31.正如背景技术所述,硅片在pecvd工序生产过程中,目前基本采用自动流水线的形式进行作业,因而需将硅片在不同设备之间进行多次相应的搬运和旋转,因此,搬运和旋转成为工艺流程中的重要环节,为了不浪费时间,通常采用同时搬运和旋转的方式来完成上述两个动作,来满足工艺和产能的需求。为了实现同时搬运和旋转两个动作,现有传统的旋转搬运机构通常具有至少两个电机,其中一个电机用于独立控制搬运动作,另一个电机用于独立控制旋转动作。如果需一次搬运和旋转更多的硅片,则旋转搬运机构可能需配置更多的电机。配置多个电机就会导致旋转搬运机构的程序相对较为复杂,生产和维护成本较高,不利于大规模地推广使用。
32.为了解决这一问题,可以对传统的旋转搬运机构的结构进行改进,具体来说,可以考虑借鉴地球在太阳系中同时进行公转和自转的现象,使旋转搬运机构的吸盘也能够在一个电机的控制下绕一轴线方向公转的同时,还能够绕自身轴线方向自转,从而实现一个电机同时控制旋转和搬运两个动作。
33.基于以上考虑,为了解决现有的旋转搬运机构需配备至少两个电机以同时完成搬运和旋转两个动作,从而导致程序相对较为复杂,生产和维护成本较高的问题,本技术发明人经过深入研究,设计了一种旋转搬运机构,通过设置旋转模块、吸附搬运模块和驱动模块,使旋转模块连接于驱动模块,吸附搬运模块通过旋转模块传动连接于驱动模块,在驱动模块的驱动下,旋转搬运机构能够将硅片生产流水线中传输的硅片同时完成旋转和搬运两个动作,将硅片从一个位置搬运至另一位置的同时,还能够使硅片从前一子工位被搬运至另一子工位时旋转一定的角度。使得只需一个电机即可同时控制旋转模块及吸附搬运模块一次完成旋转和搬运两个动作,解决了现有旋转搬运机构实现搬运和旋转的整个流程花费
时间较长的问题。
34.本技术实施例所公开的旋转搬运机构,可以但不限于用于硅片生产流水线中,也可以利用本技术所公开的旋转搬运机构用在其它类型工件的生产线中,对多个工件进行旋转和搬运,在此不作限定。
35.下面结合附图,说明本实用新型的较佳实施方式。
36.如图1所示,一种硅片生产流水线(图中未示),包括工作台(图中未示)和旋转搬运机构200,工作台用于传输并放置硅片,工作台中的每个工位具有两个间隔排布的子工位101,每个子工位101用于放置硅片,其中一个子工位101放置的两个硅片沿第二方向间隔排布,与另一个子工位101放置的两个硅片互为90度垂直放置,另一个子工位101放置的两个硅片沿第三方向间隔排布。旋转搬运机构200位于工作台上方,旋转搬运机构200能够相对工作台旋转,当硅片传输至旋转搬运机构200的下方时,旋转搬运机构200与工作台之间形成很小的吸附间隙,硅片能够被吸附至旋转搬运机构200上,从而旋转搬运机构200可以将一个子工位101的两片硅片吸附并搬运至该工位的另一子工位101,并同时将前一子工位101的两片硅片旋转90度,使硅片在被搬运至另一子工位101时能够以与前一子工位101垂直的角度放置在另一子工位101上,同时一次实现了旋转和搬运两个动作。
37.请继续参阅图1和图2,在一些实施例中,旋转搬运机构200包括驱动模块210、旋转模块220和吸附搬运模块230。驱动模块210固定安装于硅片生产流水线中,旋转模块220连接于驱动模块210,吸附搬运模块230可活动地安装于旋转模块220,吸附搬运模块230通过旋转模块220传动连接于驱动模块210。在驱动模块210的驱动下,旋转模块220和吸附搬运模块230能够相对驱动模块210共同绕一沿第一方向延伸的轴线旋转,吸附搬运模块230还能够同时相对旋转模块220绕另一沿第一方向延伸的轴线旋转,以吸附并搬运工件。图中x方向为第一方向,y方向为第二方向,z方向为第三方向,x方向、y方向和z方向两两垂直。
38.在一些实施例中,如图2和图3所示,驱动模块210优选为电机,包括固定部211和输出部212,其中固定部211固定安装于硅片生产流水线中,输出部212的一端可活动地安装于固定部211中,另一端伸出于固定部211,用于连接旋转模块220,输出部212能够相对于固定部211绕一沿第一方向延伸的轴线转动。驱动模块210可以是步进电机或伺服电机,在其它的一些实施例中,驱动模块210还可以是旋转气缸等,在此不作限定。
39.在一些实施例中,如图4所示,旋转模块220包括转盘221、传动组件222和第一连接轴223。传动组件222通过第一连接轴223设置于转盘221,传动组件222与转盘221沿第一方向间隔排布,转盘221和传动组件222共同固定安装于驱动模块210的输出部212伸出固定部211的一端。传动组件222可以有两种实施例,当传动组件222为第一实施例时,旋转模块220还包括第二连接轴224,第二连接轴224也用于连接转盘221和传动组件222。
40.具体地,请继续参阅图2和图3,转盘221优选为矩形板状结构,其两端分别连接一个吸附搬运模块230,每个吸附搬运模块230通过第一连接轴223绕另一沿第一方向延伸的轴线可转动地连接转盘221,两个吸附搬运模块230的安装角度互相垂直。驱动模块210的输出部212固定安装于转盘221的中央。图中所示为第一实施例的传动组件222,在该实施例中,传动组件222包括第一传动轮2221、第二传动轮2222和第三传动轮2223,第一传动轮2221、第二传动轮2222和第三传动轮2223均优选为齿轮,分别沿周向具有多个间隔排布的啮合齿。在一较佳实施方式中,第三传动轮2223具有两个,两个第三传动轮2223分别通过啮
合齿啮合于第一传动轮2221的径向两端;第二传动轮2222也具有两个,每个第二传动轮2222通过啮合齿啮合于一个第三传动轮2223沿其径向方向远离第一传动轮2221的一端。第一传动轮2221、两个第二传动轮2222及两个第三传动轮2223的圆心的连线为一直线。如此,每个第二传动轮2222便通过一个第三传动轮2223传动连接于第一传动轮2221。
41.进一步地,第一传动轮2221固定安装于驱动模块210的输出部212,并与驱动模块210的输出部212同轴;每个第二传动轮2222通过一根第一连接轴223连接转盘221,第一连接轴223的一端固定连接第二传动轮2222,另一端可转动地穿过转盘221,用于连接吸附搬运模块230;每个第三传动轮2223通过一根第二连接轴224与转盘221连接,第二连接轴224的一端固定连接第三传动轮2223,另一端可转动地连接转盘221,使得第一传动轮2221、第二传动轮2222及第三传动轮2223的轴线的延伸线相互平行,且均与第一方向一致。
42.如此,由于第二传动轮2222和第三传动轮2223均安装于转盘221上,且第一传动轮2221和转盘221均固定安装于驱动模块210的输出部212伸出于固定部211的一端,当第一传动轮2221在受到驱动模块210的驱动绕自身轴线方向旋转时,第二传动轮2222和第三传动轮2223均能够跟随转盘221一起绕第一传动轮2221的轴线方向旋转。同时,由于第一传动轮2221啮合于第三传动轮2223,第三传动轮2223也啮合于第二传动轮2222,使第一传动轮2221在受到驱动模块210驱动绕自身轴线方向旋转时,第三传动轮2223和第二传动轮2222还能够分别绕自身轴线方向同步旋转。其中,第三传动轮2223绕自身轴线方向旋转的旋转方向与第一传动轮2221绕自身轴线方向的旋转方向相反,第二传动轮2222绕自身轴线方向旋转的旋转方向与第一传动轮2221绕自身轴线方向的旋转方向相同。从而在一个驱动模块210的驱动下,吸附搬运模块230能够跟随第二传动轮2222绕第一传动轮2221的轴线方向旋转,同时也能够相对转盘221绕第二传动轮2222的轴线方向旋转,实现了在一个电机的控制下同时完成旋转和搬运两个动作,并且齿轮的传动转换可保证旋转和搬运的同步性,保证两个动作同步进行。需要说明的是,在该实施例中,第一传动轮2221、第二传动轮2222及第三传动轮2223可以是直齿齿轮,也可以是斜齿齿轮,在此不作限定。
43.传动组件222还可以具有第二实施例(图中未示),与传动组件222的第一实施例不同的是,在该实施例中,传动组件222只有第一传动轮2221和第二传动轮2222,并没有第三传动轮2223。第一传动轮2221具有两个,两个第一传动轮2221沿第一方向间隔排布,并同轴固定安装于驱动模块210的输出部212,且与输出部212同轴,每个第一传动轮2221通过一个同步带传动连接于一个第二传动轮2222,两个第二传动轮2222也位于第一传动轮2221沿径向方向的两端。
44.如此,当第一传动轮2221绕在驱动模块210的驱动下绕自身轴线方向旋转时,也能通过同步带使第二传动轮2222绕自身轴线方向旋转的旋转方向与第一传动轮2221绕自身轴线方向的旋转方向相同。从而在一个驱动模块210的驱动下,吸附搬运模块230也能够跟随第二传动轮2222绕第一传动轮2221的轴线方向旋转,同时也能够相对转盘221绕第二传动轮2222的轴线方向旋转。
45.在一更佳实施方式中,在传动组件222的以上两个实施例中,第二传动轮2222的直径为第一传动轮2221的直径的两倍,如此设置的目的是使第二传动轮2222绕自身轴线方向旋转的速度为第一传动轮2221绕自身轴线方向旋转的速度的二分之一,从而当驱动模块210驱动第一传动轮2221绕自身轴线方向转动180度时,也能够同步带动吸附搬运模块230
在绕第一传动轮2221的轴线方向旋转180度的同时,还能够绕第二传动轮2222的轴线方向相对转盘221旋转90度。
46.如此,如图1所示,吸附搬运模块230在与初始状态相比,吸附搬运模块230从工作台的一个工位中的一个子工位101绕第一传动轮2221的轴线方向旋转180度到了另一个子工位101,并且吸附搬运模块230在另一个子工位101所处的角度也与前一子工位101所处的角度相比绕第二传动轮2222的轴线方向旋转了90度,实现了一个驱动模块210一次驱动搬运和旋转两个不同的动作,以能够将硅片放置于正确的位置。
47.在一些实施例中,每个吸附搬运模块230包括连接架231和吸盘232,连接架231的一端固定安装于旋转模块220的第一连接轴223的一端,连接架231的另一端用于安装吸盘232,从而吸盘232与连接架231可以在第二传动轮2222绕自身轴线方向旋转时也跟随第二传动轮2222绕第二传动轮2222的轴线方向旋转。
48.具体地,在一些实施例中,如图5所示,连接架231包括连接板2311和两个子连接架2312,连接板2311沿第一方向的一侧固定安装于第一连接轴223的一端,两个子连接架2312间隔安装于连接板2311长度方向的两端,每个子连接架2312用于安装一个吸盘232,每个吸盘232可固定安装于一个子连接架2312上,也可以沿第一方向上下可活动地安装于一个子连接架2312上,只要能够将硅片吸附到吸盘232上即可,在此不作限定。
49.需要说明的是,子连接架2312的数量不限,可以只有一个,也可以有多个,当子连接架2312具有多个时,相应地本技术提供旋转搬运机构200也具有多个吸盘232,从而能够吸附并搬运更多的硅片。
50.进一步地,在一些实施例中,吸盘232优选为长方形的薄板结构,在其厚度方向靠近连接架231的一侧具有第一吸气口2321,第一吸气口2321用于通入气体,当气体通入至第一吸气口2321时,硅片能够被吸附在吸盘232上。
51.需要说明的是,上述旋转搬运机构200还可以进行进一步地扩展,当每个工位具有更多子工位101时,可以在旋转模块220中设置多个绕第一方向的延伸线的轴向方向间隔排布的第二传动轮2222,并且相应地设置多个绕第一方向的延伸线的轴向方向间隔排布的吸附搬运模块230,从而可以一次吸附并搬运更多的硅片。
52.请继续参阅图1,上述旋转搬运机构200及硅片生产流水线,其动作过程如下:
53.在硅片生产流水线中,旋转搬运机构200的吸盘232的安装高度比工作台稍高一些,从而每个吸盘232与工作台之间能够形成很小的吸附间隙。
54.第一步,硅片在工作台上沿第二方向传输,当传输到一个工位中的子工位101时,硅片位于旋转搬运机构200其中一个吸附搬运模块230的下方并位于上述吸附间隙中,此时在吸盘232的第一吸气口2321中通入气体,根据伯努利原理,在吸附间隙的位置处气压比吸附间隙以外的位置气压大,硅片能够被自动吸附至吸盘232上。
55.第二步,启动驱动模块210,驱动模块210的输出部212开始绕自身轴线方向旋转,当驱动模块210驱动第一传动轮2221绕自身轴线方向旋转了90度时,也同步带动转盘221旋转了90度,而此时第二传动轮2222也带动吸盘232在跟随转盘221一起绕第一传动轮2221的轴线方向旋转了90度,同时还使吸盘232绕第二传动轮2222的轴线方向相对转盘221旋转了45度。
56.当驱动模块210继续驱动第一传动轮2221再次沿相同方向旋转90度时,继续同步
带动转盘221旋转了90度,第二传动轮2222也带动吸盘232在跟随转盘221一起绕第一传动轮2221的轴线方向继续沿相同方向旋转了90度,同时还使吸盘232绕第二传动轮2222的轴线方向相对转盘221继续沿相同旋转了45度。
57.此时,和初始状态相比,吸盘232吸附着硅片从工作台的一个工位中的一个子工位101绕第一传动轮2221的轴线方向旋转180度到了另一个子工位101,并且吸附搬运模块230在另一个子工位101所处的角度也与前一子工位101所处的角度相比绕第二传动轮2222的轴线方向旋转了90度。
58.第三步,停止对吸盘232的第一吸气口2321通气,此时吸盘232放片,硅片从吸盘232上落到上述相同工位的另一个子工位101中,从而实现了搬运和旋转两个动作。
59.第四步,驱动模块210再反向运转,第一传动轮2221及转盘221也随之反向旋转,使吸盘232再回到初始位置。如此,两个吸附搬运模块230交替位置,进行循环往复的搬运和旋转动作以完成硅片的循环吸片和放片的动作。
60.以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
61.以上所述实施例仅表达了本实用新型的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对实用新型专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。因此,本实用新型专利的保护范围应以所附权利要求为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
