1.本发明属于农用机械设备技术领域,具体涉及一种智能气动可变调位姿深松机。
背景技术:
2.长期耕作土壤将会变得紧密进而造成土壤压实,土壤质量也随之下降,土壤深松成本逐渐提高,农产品产量却在逐年地降低,传统的深松方式阻力大、能耗高,铲刀铲面容易磨损,深松效率低下,因此提高土地深耕深松技术迫在眉睫。
3.现有深松技术主要为机械深松与振动深松,现通过气动对土壤深松,对土壤进行剪切,由于目前农业机具智能化功能不高,两者结合达到很好的深松效果,随着信息产业高速发展,尤其是智能化在农用机械中应用越来越广,极大的提高生产效率和降低用工成本,解决人工劳动效率低下的问题。
技术实现要素:
4.本发明目的是针对不同土壤类型、不同耕作深度的问题提供了一种智能气动可变调位姿深松机。
5.本发明是通过以下技术方案实现的:
6.一种智能气动可变调位姿深松机,包括:机架、可变调位姿深松铲、气压发生装置以及牵引与检测装置;
7.所述牵引与检测装置安装在机架的后端,牵引与检测装置上设置有阻力传感器;
8.所述可变调位姿深松铲安装在机架的前端,可变调位姿深松铲包括铲子、耳板、弹簧前挡板、弹簧、弹簧导向滑柱、弹簧后挡板、弹簧后支座、底板、铲头和喷嘴;其中,所述铲子为j字形,铲子的内部具有中空的气道,气道中穿装有气管,铲子的底端位置处设置有铲头,铲头中心位置处设置所述喷嘴,该喷嘴与铲子内部的气管的出气口连接;所述耳板固定在底板的前端两侧;在底板的前端开设有开槽,铲子的顶部安装在该开槽中,并且铲子铰接安装在底板或者耳板上;所述弹簧前挡板滑动套装在弹簧导向滑柱的前端,弹簧后挡板固定安装在弹簧导向滑柱的尾端,弹簧套装在弹簧导向滑柱上并且位于弹簧前挡板和弹簧后挡板之间,弹簧后挡板通过螺栓固定连接在弹簧后支座上,弹簧后支座安装在底板尾端;铲子的顶部设置有凹槽,弹簧前挡板的头部设置有套筒,弹簧前挡板的套筒置于该凹槽中,并且在凹槽的顶部设置限位钉,防止弹簧前挡板向上脱离出铲子顶部的凹槽;弹簧前挡板在弹簧的作用力下与铲子的顶部相顶触,当铲子绕其铰接轴旋转时,铲子的顶端会顶触弹簧前挡板沿弹簧导向滑柱运动,同时弹簧发生形变;
9.所述气压发生装置的出气口通过管路与铲子内的气管的进气口连通,为其供给气压。
10.在上述技术方案中,牵引与检测装置为三叉结构,包括中间支叉和两侧支叉,两侧支叉的尾端与中间支叉的尾端通过螺栓连接在一起,用于连接牵引车;两侧支叉的头端与中间支叉的头端与所述机架连接;在牵引与检测装置的两侧支叉头端与机架连接处设置有
下悬挂阻力传感器,在牵引与检测装置的尾端与牵引车连接处设置有上悬挂阻力传感器。
11.在上述技术方案中,所述机架为金属框架结构,在机架上设置有用于与牵引与检测装置连接的安装部,安装部包括两个用于连接牵引与检测装置的两侧支叉头端的第一安装部以及用于连接牵引与检测装置的中间支叉头端的第二安装部。
12.在上述技术方案中,所述可变调位姿深松铲的数量为3-6组,等间距呈一排排布安装在机架的前端。
13.在上述技术方案中,可变调位姿深松铲的耳板上设置有第一限位销和第二限位销,第一限位销用于限制铲子顶部向后移动的极限位置,第二限位销用于限制铲子顶部向前移动的极限位置,当铲子入土工作时,在牵引机的牵引下,铲子向前运动,铲子底部受到土体的反作用力,铲子会绕其铰接轴旋转,在弹簧的作用下铲子的顶部会在第一限位销和第二限位销之间往复振动。
14.在上述技术方案中,铲子的底部出气口处设置有用于调节喷嘴角度的深松变位机构,深松变位机构包括铰接支架、位姿变位连杆、底托盘、齿条、齿轮、舵机、上托盘和深松变位器外壳;在铲子的底部出气口处设置有安装腔,所述深松变位器外壳嵌装在该安装腔内,深松变位器外壳具有内腔且内腔与铲子的气道相连通;所述位姿变位连杆的顶端通过铰接支架连接在深松变位器外壳的顶部,位姿变位连杆的底端设置所述底托盘,位姿变位连杆的中部设置所述上托盘,位姿变位连杆还和齿条的底端相铰接,齿条与上端与齿轮配合,齿轮安装在舵机的转轴上,舵机安装在深松变位器外壳的顶部;铲子气道中的气管底端伸进至深松变位器外壳内并与喷嘴连接,喷嘴固定在上托盘和底托盘之间;在工作过程中,舵机转动带动齿轮,齿轮带动齿条,齿条带动位姿变位连杆进行上下运动,从而带动喷嘴运动,调整喷嘴的出气射流位姿角度;在铰接支架处还设置有角度传感器,检测位姿变位连杆的角度,进而可换算出喷嘴的出气射流位姿角度。
15.在上述技术方案中,在机架上还设有可调整深松深度测量装置,可调整深松深度测量装置安装在机架的两侧,可调整深松深度测量装置包括限深轮连杆、连杆固定板、限深轮、深松深度传感器,限深轮安装在限深轮连杆底部,限深轮连杆的上端位置处设置连杆固定板,通过连杆固定板和螺栓组件将限深轮连杆固定连接在机架上,限深轮连杆的顶部设置深松深度传感器,深松深度传感器采用测距传感器,测量距离地面的距离,通过深松深度传感器测量深松铲在工作过程中工作深度。
16.在上述技术方案中,在机架上还设有控制系统,控制系统与牵引与检测装置的下悬挂阻力传感器和上悬挂阻力传感器进行通讯连接、与气压发生装置的气压传感器进行通讯连接、与可变调位姿深松铲的深松变位机构的角度传感器进行通讯连接、与可调整深松深度测量装置的深松深度传感器进行通讯连接。
17.在上述技术方案中,控制系统能够根据下悬挂阻力传感器、上悬挂阻力传感器、气压传感器、角度传感器、深松深度传感器的实时监测数据对气压发生装置供给的工作气压以及喷嘴的出气射流位姿角度进行控制。
18.本发明的优点和有益效果为:
19.本发明为一种智能气动可变调位姿深松机,为实现深松智能化、自动化提供技术基础,可以解决深松阻力大、成本高,实现深松减阻降耗;在深松耕作过程中,可以根据实时检测系统对土壤阻力、深松深度、深松喷气位姿角度进行测量。根据阻力传感器、气压传感
器、角度传感器、深松深度传感器的实时监测数据对气压发生装置供给的工作气压以及喷嘴的出气射流位姿角度进行智能控制,达到良好的深松效果。
附图说明
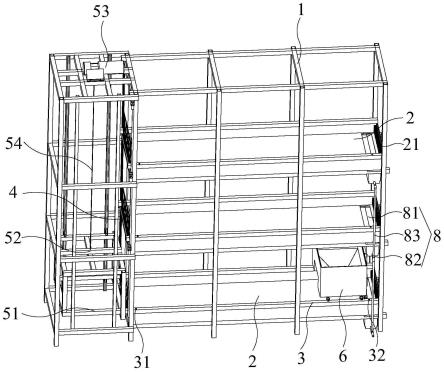
20.图1是本发明的结构示意图。
21.图2是可变调位姿深松铲示意图。
22.图3是机架示意图。
23.图4是可调整深松深度测量装置示意。
24.图5是牵引与检测装置示意图。
25.图6是铲子的示意图。
26.图7是深松变位机构的示意图。
27.图8是气压发生装置的气路原理图。
28.对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,可以根据以上附图获得其他的相关附图。
具体实施方式
29.为了使本技术领域的人员更好地理解本发明方案,下面结合具体实施例进一步说明本发明的技术方案。
30.实施例一
31.以下结合图1~图8对本发明作进一步详细描述:
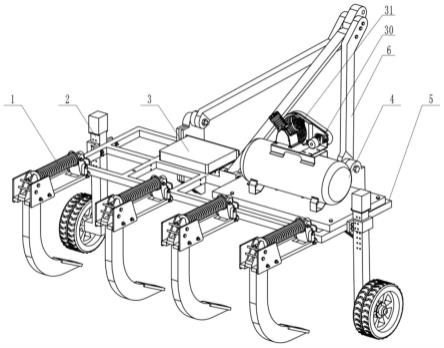
32.如图1所示,一种智能气动可变调位姿深松机,包括:机架5,在机架5上安装有可变调位姿深松铲1、可调整深松深度测量装置2、控制系统3、气压发生装置4、以及牵引与检测装置6。
33.参见附图5,所述牵引与检测装置6安装在机架5的后端,牵引与检测装置6为三叉结构,包括中间支叉24和两侧支叉23,两侧支叉23的尾端与中间支叉24的尾端通过螺栓连接在一起,用于连接牵引车;两侧支叉23的头端与中间支叉24的头端与所述机架5连接。
34.如图3所示,所述机架5为金属框架结构,在机架5上设置有用于与牵引与检测装置6连接的安装部,安装部包括两个用于连接牵引与检测装置6的两侧支叉23头端的第一安装部21以及用于连接牵引与检测装置6的中间支叉24头端的第二安装部22。在牵引与检测装置6的两侧支叉23头端与机架5连接处设置有下悬挂阻力传感器25,在牵引与检测装置6的尾端与牵引车连接处设置有上悬挂阻力传感器27。
35.所述可变调位姿深松铲1的数量优选为4组,等间距呈一排排布安装在机架5的前端;具体的讲,可变调位姿深松铲1包括铲子7、耳板9、弹簧前挡板11、弹簧12、弹簧导向滑柱13、弹簧后挡板14、弹簧后支座15、底板16、铲头17和喷嘴18。其中,所述铲子7为j字形,铲子7的内部具有中空的气道29,气道29中穿装有气管,铲子7的底端位置处设置有铲头17,铲头17中心位置处设置所述喷嘴18,该喷嘴18与铲子7内部的气管的出气口连接;所述耳板9通过螺栓c1和螺栓c2固定在底板16的前端两侧;在底板16的前端开设有开槽,铲子7的顶部安装在该开槽中,并且铲子7通过螺栓c1铰接安装在底板16上(需要说明的是,本实施例为简化结构,将螺栓c1同时作为耳板9的安装螺栓以及最为铲子7的安装螺栓,现实中也可以单
独利用其它螺栓或者销轴、转轴将铲子7安装在底板16上或者耳板9上),铲子7能够绕螺栓c1旋转。
36.所述弹簧前挡板11滑动套装在弹簧导向滑柱13的前端,弹簧后挡板14固定安装在弹簧导向滑柱13的尾端,弹簧12套装在弹簧导向滑柱13上并且位于弹簧前挡板11和弹簧后挡板14之间,弹簧后挡板14通过螺栓固定连接在弹簧后支座15上,弹簧后支座15安装在底板16尾端,底板16的尾端还设置有立板16.1,立板上设置有螺栓孔,底板16的尾端的立板通过螺栓固定安装在机架5的前端;弹簧前挡板11的头部设置有套筒11.1,套筒11.1的孔径略大于弹簧导向滑柱13直径,这样整个弹簧前挡板11能够沿弹簧导向滑柱13长度方向滑动。
37.铲子7的顶部设置有凹槽,所述弹簧前挡板11的套筒11.1置于该凹槽中,并且在凹槽的顶部设置限位钉m,防止弹簧前挡板11向上脱离出铲子7顶部的凹槽;弹簧前挡板11在弹簧12的作用力下与铲子7的顶部相顶触,当铲子7绕其铰接轴(即螺栓c1)旋转时,铲子7的顶端会顶触弹簧前挡板11沿弹簧导向滑柱13运动,同时弹簧12发生形变。
38.在耳板9上设置有第一限位销10和第二限位销8,第一限位销10用于限制铲子7顶部向后移动的极限位置,第二限位销8用于限制铲子7顶部向前移动的极限位置,参见附图6,是铲子7处于非工作状态下的示意图,此时铲子7的顶部顶触在第一限位销10上,第二限位销8与铲子7的顶部之间存在一定间隙。当铲子7入土工作时,在牵引机的牵引下,铲子7向前运动,铲子7底部受到土体的反作用力,铲子7会绕其铰接轴(即螺栓c1)旋转,在弹簧12的作用下铲子7的顶部会在第一限位销10和第二限位销8之间往复振动,铲子的往复振动能够加强对土壤的深松效果。
39.如7图所示,铲子7的底部出气口处设置有用于调节喷嘴18角度的深松变位机构,深松变位机构包括铰接支架101、位姿变位连杆102、底托盘103、齿条104、齿轮105、舵机106、上托盘107和深松变位器外壳108;在铲子7的底部出气口处设置有安装腔,所述深松变位器外壳108嵌装在该安装腔内,深松变位器外壳108由顶面、底面和侧面构成,即深松变位器外壳108具有内腔且内腔与铲子7的气道相连通;所述位姿变位连杆102的顶端通过铰接支架101连接在深松变位器外壳108的顶部,位姿变位连杆102的底端设置所述底托盘103,位姿变位连杆102的中部设置所述上托盘107,位姿变位连杆102还和齿条104的底端相铰接,齿条104与上端与齿轮105配合,齿轮105安装在舵机106的转轴上,舵机106安装在深松变位器外壳108的顶部;铲子7气道中的气管底端伸进至深松变位器外壳108内并与喷嘴18连接,喷嘴18固定在上托盘107和底托盘103之间。在工作过程中,舵机106转动带动齿轮105,齿轮105带动齿条104,齿条104带动位姿变位连杆102进行上下运动,从而带动喷嘴18运动,调整喷嘴18的出气射流位姿角度;在铰接支架101处还设置有角度传感器109,检测位姿变位连杆102的角度,进而可换算出喷嘴18的出气射流位姿角度。
40.所述气压发生装置4通过螺栓安装在机架5上表面的左侧位置,气压发生装置4的出气口通过管路与铲子7内的气管的进气口p连通,为其供给气压。如图1和8所示,气压发生装置4包括电动机30、空气压缩机31、进气口300、气缸301、溢流阀302、流量计303、调节阀304、二位二通直动式电磁阀305、单向阀306、出气口307、气动保护装置308,所述气压发生装置由与气管29连接,进气口300连接气缸301,气缸301与溢流阀302连接,溢流阀302通过气管连接气压传感器303,气压传感器303通过气管与调节阀304连接,调节阀304通过气管与电磁阀装置305连接,所述电磁阀装置305为一个二位二通直动式电磁阀,所述二位二通
直动式电磁阀通过气管与单向阀306连接,所述单向阀306通过气管连接铲子7内的气管的进气口p,所述气动保护装置308由二位一通直动式电磁阀与溢流阀组成。空气由进气口300通过空气压缩机31与电动机30将空气压缩至气缸301内,向下输入至流量计303、调节阀304,输入二位二通直动式电磁阀305,同时传输到气动保护装置308内部的二位一通直动式电磁阀,二位二通直动式电磁阀305与气动保护装置308内部的二位一通直动式电磁阀互为自锁,当工作过程中,二位二通直动式电磁阀305通电,气道接通单向阀306,同时气动保护装置308内部的二位一通直动式电磁阀处于闭合状态,当出气口307全部堵塞,工作气压过高且超过气泵额定工作气压的10%时,气动保护装置308内部的二位一通直动式电磁阀接通,保护气泵。
41.所述可调整深松深度测量装置2安装在机架5的两侧。如图4所示,可调整深松深度测量装置2包括限深轮连杆19、连杆固定板20、限深轮26、深松深度传感器201,限深轮26安装在限深轮连杆19底部,限深轮连杆19的上端位置处设置连杆固定板20,通过连杆固定板20和螺栓组件将限深轮连杆19固定连接在机架5上,限深轮连杆19的顶部设置深松深度传感器201,深松深度传感器201采用测距传感器,测量距离地面的距离,通过深松深度传感器201测量深松铲在工作过程中工作深度。
42.所述控制系统3安装在机架5上表面的右侧位置,控制系统3与牵引与检测装置6的下悬挂阻力传感器25和上悬挂阻力传感器27进行通讯连接、与气压发生装置4的气压传感器303进行通讯连接、与可变调位姿深松铲1的深松变位机构的角度传感器109进行通讯连接、与可调整深松深度测量装置2的深松深度传感器201进行通讯连接。用于根据下悬挂阻力传感器25、上悬挂阻力传感器27、气压传感器303、角度传感器109、深松深度传感器201的实时监测数据对气压发生装置4供给的工作气压以及喷嘴18的出气射流位姿角度进行智能控制。
43.由于在气动深松状态下,气压过高并无法更好打破土壤犁底层,且会造成土壤水分流失,因此本发明通过下悬挂阻力传感器25和上悬挂阻力传感器27对土壤的深松耕作阻力进行实时监控,这些阻力信号能够反映出土壤状态,因此可根据采集的阻力信号调控工作气压的大小,达到良好的深松效果。
44.进一步的说,控制系统还可以与远程端进行通讯,实现远程监控。
45.为了易于说明,实施例中使用了诸如“上”、“下”、“左”、“右”等空间相对术语,用于说明图中示出的一个元件或特征相对于另一个元件或特征的关系。应该理解的是,除了图中示出的方位之外,空间术语意在于包括装置在使用或操作中的不同方位。例如,如果图中的装置被倒置,被叙述为位于其他元件或特征“下”的元件将定位在其他元件或特征“上”。因此,示例性术语“下”可以包含上和下方位两者。装置可以以其他方式定位(旋转90度或位于其他方位),这里所用的空间相对说明可相应地解释。
46.而且,诸如“第一”和“第二”等之类的关系术语仅仅用来将一个与另一个具有相同名称的部件区分开来,而不一定要求或者暗示这些部件之间存在任何这种实际的关系或者顺序。
47.以上对本发明做了示例性的描述,应该说明的是,在不脱离本发明的核心的情况下,任何简单的变形、修改或者其他本领域技术人员能够不花费创造性劳动的等同替换均落入本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。