技术特征:
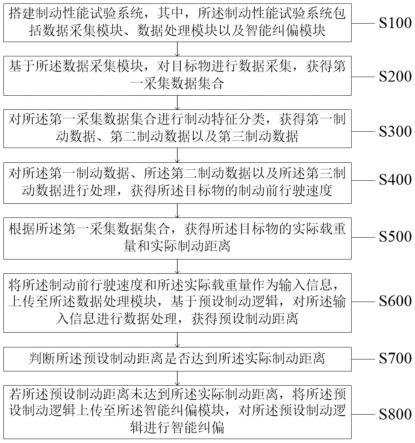
1.一种叉车制动性能试验方法,其特征在于,所述方法包括:搭建制动性能试验系统,其中,所述制动性能试验系统包括数据采集模块、数据处理模块以及智能纠偏模块;基于所述数据采集模块,对目标物进行数据采集,获得第一采集数据集合;对所述第一采集数据集合进行制动特征分类,获得第一制动数据、第二制动数据以及第三制动数据;对所述第一制动数据、所述第二制动数据以及所述第三制动数据进行处理,获得所述目标物的制动前行驶速度;根据所述第一采集数据集合,获得所述目标物的实际载重量和实际制动距离;将所述制动前行驶速度和所述实际载重量作为输入信息,上传至所述数据处理模块,基于预设制动逻辑,对所述输入信息进行数据处理,获得预设制动距离;判断所述预设制动距离是否达到所述实际制动距离;若所述预设制动距离未达到所述实际制动距离,将所述预设制动逻辑上传至所述智能纠偏模块,对所述预设制动逻辑进行智能纠偏。2.如权利要求1所述的方法,其特征在于,所述智能纠偏模块,包括:所述智能纠偏模块嵌入有网络延时校准单元;获得所述对目标物进行数据采集时的第一时间节点;获得计算到所述制动前行驶速度时的第二时间节点;将所述第一时间节点和所述第二时间节点输入至所述网络延时校准单元,且根据网络延时算法,对所述第一时间节点和所述第二时间节点进行补差的同步校准。3.如权利要求1所述的方法,其特征在于,所述对所述第一采集数据集合进行制动特征分类,包括:采集制动特征分类集合;获得所述制动特征分类集合中,各制动特征对所述目标物的制动影响系数集合;对所述制动影响系数集合进行系数大小的降序排列,获得制动影响系数序列;根据所述制动影响系数序列,获得第一制动特征类别、第二制动特征类别以及第三制动特征类别;基于所述第一制动特征类别,对所述第一采集数据集合进行智能检索,获得所述第一制动数据;基于所述第二制动特征类别,对所述第一采集数据集合进行智能检索,获得所述第二制动数据;基于所述第三制动特征类别,对所述第一采集数据集合进行智能检索,获得所述第三制动数据。4.如权利要求1所述的方法,其特征在于,所述对所述第一制动数据、所述第二制动数据以及所述第三制动数据进行处理,包括:将所述第一制动数据、第二制动数据以及第三制动数据上传至层级数据分析器,所述层级数据分析器包括第一层级分析器、第二层级分析器以及第三层级分析器,且所述层级数据分析器为所述数据处理模块的前端数据分析模块;将所述第一制动数据和所述第二制动数据输入至所述第一层级分析器进行数据分析,
获得第一分析结果;将所述第二制动数据和所述第三制动数据输入至所述第二层级分析器进行数据分析,获得第二分析结果;将所述第一制动数据和所述第三制动数据输入至所述第三层级分析器进行数据分析,获得第三分析结果;对所述第一分析结果、所述第二分析结果和所述第三分析结果,进行综合解析,生成所述目标物的制动前行驶速度。5.如权利要求4所述的方法,其特征在于,所述方法包括:基于深度学习的样本增强算法,对所述第一分析结果、所述第二分析结果以及所述第三分析结果进行数据处理,获得第一升级优化参数;根据所述第一升级优化参数,对所述层级数据分析器进行迭代优化。6.如权利要求1所述的方法,其特征在于,所述基于预设制动逻辑,包括:将车辆的行驶初速度定义为v,将所述车辆的载重量定义为m,将所述车辆的制动距离定义为s,所述预设制动逻辑满足下列关系式:若v≤5,且m<35000,则若v≤5,且m≥35000,则若5<v≤13.4,且m<35000,则若5<v≤13.4,且m≥35000,则7.如权利要求6所述的方法,其特征在于,所述方法包括:若v>13.4,且m<35000,则若v>13.4,且m≥35000,则8.一种叉车制动性能试验装置,其特征在于,所述装置应用于权利要求1~7任一所述方法,所述装置包括:第一搭建单元:所述第一搭建单元用于搭建制动性能试验系统,其中,所述制动性能试验系统包括数据采集模块、数据处理模块以及智能纠偏模块;第一获得单元:所述第一获得单元用于基于数据采集模块,对目标物进行数据采集,获得第一采集数据集合;第二获得单元:所述第二获得单元用于对所述第一采集数据集合进行制动特征分类,获得第一制动数据、第二制动数据以及第三制动数据;第三获得单元:所述第三获得单元用于对所述第一制动数据、所述第二制动数据以及所述第三制动数据进行处理,获得所述目标物的制动前行驶速度;第四获得单元:所述第四获得单元用于根据所述第一采集数据集合,获得所述目标物的实际载重量和实际制动距离;第五获得单元:所述第五获得单元用于将所述制动前行驶速度和所述实际载重量作为
输入信息,上传至数据处理模块,基于预设制动逻辑,对所述输入信息进行数据处理,获得预设制动距离;第一判断单元:所述第一判断单元用于判断所述预设制动距离是否达到所述实际制动距离;第一执行单元:所述第一执行单元用于若所述预设制动距离未达到所述实际制动距离,将所述预设制动逻辑上传至智能纠偏模块,对所述预设制动逻辑进行智能纠偏。9.一种电子设备,其特征在于,包括处理器和存储器;所述存储器,用于存储;所述处理器,用于通过调用,执行权利要求1~7中任一项所述的方法。10.一种计算机程序产品,包括计算机程序和/或指令,其特征在于,该计算机程序和/或指令被处理器执行时实现权利要求1~7中任一项所述方法的步骤。
技术总结
本发明公开了一种叉车制动性能试验方法及装置,所述方法包括:通过搭建制动性能试验系统,其中包括数据采集模块、数据处理模块以及智能纠偏模块;基于数据采集模块获得第一采集数据集合;制动特征分类获得第一制动数据、第二制动数据以及第三制动数据;获得目标物的制动前行驶速度;获得实际载重量和实际制动距离;所述数据处理模块基于预设制动逻辑,获得预设制动距离;判断预设制动距离是否达到实际制动距离;若预设制动距离未达到实际制动距离,利用智能纠偏模块对预设制动逻辑进行智能纠偏。解决了现有技术中对叉车的制动性能进行检验时,存在试验效率低,花费人力成本高,同时存在无法对叉车的实时制动性能进行及时检验的技术问题。的技术问题。的技术问题。
技术研发人员:韩绍华 乔捷
受保护的技术使用者:江苏省特种设备安全监督检验研究院
技术研发日:2022.03.22
技术公布日:2022/6/28
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。