1.本发明涉及一种建筑施工设备及施工方法,尤其涉及一种自动化混凝土抹面施工装置及施工方法。
背景技术:
2.混凝土浇筑后,需要对混凝土表面进行抹面的收光处理,传统施工工艺是:混凝土经过振捣后,需要再上人进行混凝土的人工抹面收光工作。由于混凝土在振捣后已经形成了较好的状态,再次上人作业会在已完成的较好的工作面上踩出很大凹陷,抹面施工时需要将凹陷填满,压实。但此填补过程往往是向混凝土面上的凹陷部分中推入浆料,浆料中的骨料成分很少,难以保障混凝土成品质量。同时,在混凝土收面作业时,工人在混凝土面上踩踏,不仅行动不方便,而且还需要将踩出凹陷再进行修复,工作量大,过程繁琐且十分影响作业进度和效率,还会影响混凝土面的成品质量。
技术实现要素:
3.本发明的目的在于提供一种自动化混凝土抹面施工装置及施工方法,能实现混凝土面的自动化抹面,提高混凝土面的抹面效率和质量。
4.本发明是这样实现的:
5.一种自动化混凝土抹面施工装置,包括行走主机、行走分机、移动端抹面组件和线轨;行走主机和行走分机内均设有绕线组件,线轨的两端分别通过绕线组件与行走主机和行走分机连接;行走主机和行走分机分别设置在混凝土面的两侧,行走主机与行走分机无线连接并沿混凝土面的边缘处同步移动,且线轨张紧设置在混凝土面的上方;移动端抹面组件的底部设有抹面面板,抹面面板设置在混凝土面上,移动端抹面组件内设有线轨移动组件,线轨贯穿移动端抹面组件并与线轨移动组件可滑动接触式连接,使移动端抹面组件能通过线轨移动组件沿线轨滑动,且抹面面板在混凝土面上抹面作业。
6.所述的绕线组件包括第一驱动器、绕线筒、绕线轴、线轨调节机构和线轨制动器;
7.在行走主机内,第一驱动器固定安装在行走主机内,第一驱动器的输出端与绕线筒的一端同轴连接且同步转动,绕线轴的一端可转动式同轴插接在绕线筒的另一端内,绕线轴的另一端固定安装在行走主机内;线轨调节机构可升降式安装在行走主机内,线轨制动器安装在线轨调节机构上,线轨的一端通过线轨制动器绕置在绕线筒上;
8.在行走分机内,第一驱动器固定安装在行走分机内,第一驱动器的输出端与绕线筒的一端同轴连接且同步转动,绕线轴的一端可转动式同轴插接在绕线筒的另一端内,绕线轴的另一端固定安装在行走分机内;线轨调节机构可升降式安装在行走分机内,线轨制动器安装在线轨调节机构上,线轨的另一端通过线轨制动器绕置在绕线筒上;
9.线轨调节机构包括调节槽、调节杆和定位件;在行走主机内,调节槽竖向设置在行走主机的两侧壁上,调节杆的两端分别通过调节槽与行走主机可滑动式连接,并通过定位件锁紧在行走主机上;在行走分机内,调节槽竖向设置在行走分机的两侧壁上,调节杆的两
端分别通过调节槽与行走分机可滑动式连接,并通过定位件锁紧在行走分机上。
10.所述的行走主机包括主机外壳、主机移动轮、主机齿轮、第二驱动器、主机传动皮带和控制组件;若干个主机移动轮和若干个主机齿轮分别可转动式安装在主机外壳的底部四周,主机齿轮与主机移动轮一一对应且同步转动;第二驱动器设置在主机外壳内,第二驱动器的输出轴与位于主机外壳一端的主机齿轮同轴连接且同步转动,位于主机外壳两端的两个主机齿轮分别通过主机传动皮带传动连接;控制组件安装在主机外壳内,控制组件能与移动端抹面组件吸附连接并与行走分机无线连接;
11.控制组件包括plc控制器、电磁铁、定时器、同步信号发送器和电磁通电控制器;plc控制器的输出端分别与行走主机内的第一驱动器、第二驱动器、同步信号发送器和电磁通电控制器的输入端连接,电磁通电控制器的输出端与电磁铁连接,定时器的输出端与plc控制器的输入端连接;移动端抹面组件内可抽拉式设有吸附侧杆,吸附侧杆能插入至主机外壳内并吸附在电磁铁上;同步信号发送器与行走分机无线连接。
12.所述的行走分机包括分机外壳、分机移动轮、分机齿轮、第三驱动器、分机传动皮带和同步信号接收器,若干个分机移动轮和若干个分机齿轮分别可转动式安装在分机外壳的底部四周,分机齿轮与分机移动轮一一对应且同步转动;第三驱动器设置在分机外壳内,第三驱动器的输出轴与位于分机外壳一端的分机齿轮同轴连接且同步转动,位于分机外壳两端的两个分机齿轮分别通过分机传动皮带传动连接;同步信号接收器安装在分机外壳内并与同步信号发送器无线连接。
13.所述的移动端抹面组件包括抹面外壳和伸缩立柱;抹面面板通过伸缩立柱设置在抹面外壳的下方,吸附侧杆设置在抹面外壳的侧端并面向行走主机设置;线轨移动组件设置在抹面外壳内;
14.线轨移动组件包括上线轨轮、下线轨轮、第四驱动件、从传动齿轮、线轨驱动皮带和主传动齿轮;上线轨轮、下线轨轮和主传动齿轮分别可转动式安装在抹面外壳内,上线轨轮与线轨的上部可滑动接触式连接,下线轨轮与线轨的下部可滑动接触式连接;从传动齿轮与下线轨轮同轴连接并与主传动齿轮啮合连接,第四驱动件安装在抹面外壳内,第四驱动件的输出轴与主传动齿轮的轮轴之间通过线轨驱动皮带同步传动连接;
15.抹面面板包括初平面板和精平面板,初平面板和精平面板上均设有翘边和斜段;
16.抹面外壳包括抹面上外壳、抹面下外壳、转动轴和固定夹;上线轨轮设置在抹面上外壳内,下线轨轮设置在抹面下外壳内;抹面上外壳的底部一侧通过转动轴与抹面下外壳的顶部一侧可翻转开合式连接,抹面上外壳的底部另一侧通过固定夹与抹面下外壳的顶部另一侧活动连接;抹面上外壳与抹面下外壳连接呈l形结构,线轨通过线轨导盖活动设置在抹面下外壳上并贯穿入抹面外壳内。
17.所述的抹面外壳上设光束收发器,行走分机上设有光束反射镜,光束收发器面向光束反射镜设置。
18.一种采用自动化混凝土抹面施工装置的施工方法,包括以下步骤:
19.步骤1:在混凝土面的两侧分别布置行走主机和行走分机,在混凝土面上布置移动端抹面组件,并在行走主机与行走分机之间布置贯穿移动端抹面组件的线轨;
20.步骤2:依次启动行走主机、行走分机和移动端抹面组件,使移动端抹面组件沿线轨从行走主机向行走分机平移,并通过抹面面板对混凝土面进行抹面施工;
21.步骤3:依次关闭行走分机、移动端抹面组件和行走主机。
22.所述的步骤1包括以下分步骤:
23.步骤1.1:释放绕置在行走主机内的线轨的一端,释放绕置在行走分机内的线轨的另一端;
24.步骤1.2:将行走主机和行走分机分别设置在混凝土面的一端两侧,使行走主机和行走分机的行走方向相同,且线轨位于行走主机与行走分机之间;
25.步骤1.3:将移动端抹面组件设置在混凝土面上,且靠近行走主机;
26.步骤1.4:将行走主机内线轨一端的高度、行走分机内线轨另一端的高度、以及移动端抹面组件内线轨移动组件的高度调节至同一高度,使线轨水平穿设在行走主机、行走分机和移动端抹面组件之间;
27.步骤1.5:通过绕线组件张紧线轨,并锁紧移动端抹面组件,使线轨滑动接触式穿设在移动端抹面组件内的上线轨轮与下线轨轮之间;
28.步骤1.6:将移动端抹面组件内的吸附侧杆抽出并插入至行走主机内,使吸附侧杆与设置在行走主机内的电磁铁吸附连接。
29.所述的步骤2包括以下分步骤:
30.步骤2.1:启动行走主机和行走分机,设置在行走主机内的电磁铁进入常驻模式;
31.步骤2.2:设置返程距离,启动移动端抹面组件,通过线轨移动组件驱动移动端抹面组件从行走主机向行走分机平移,同时通过抹面面板对混凝土面进行一次抹面施工;
32.步骤2.3:设置在行走主机内的电磁铁进入延时模式;
33.步骤2.4:移动端抹面组件达到返程距离后,通过线轨移动组件驱动移动端抹面组件从行走分机向行走主机平移,同时通过抹面面板对混凝土面进行二次抹面施工;
34.步骤2.5:将设置在移动端抹面组件内的吸附侧杆抽出并插入至行走主机内,使吸附侧杆与设置在行走主机内的电磁铁吸附连接;
35.步骤2.6:行走主机向行走分机发送同步信号,行走主机和行走分机同步行走;
36.步骤2.7:行走主机带动移动端抹面组件同步行走,使移动端抹面组件沿混凝土面移动一个抹面面板的长度,行走完成后解除行走主机与移动端抹面组件的连接;
37.步骤2.8:重复步骤2.2至步骤2.7,直至完成整个混凝土面的抹面作业。
38.所述的步骤3包括以下分步骤:
39.步骤3.1:在移动端抹面组件最后一次从行走分机向行走主机平移时,关闭行走分机;
40.步骤3.2:移动端抹面组件最后一次与行走主机吸附连接后,设置在行走主机内的电磁铁进入常驻模式;
41.步骤3.3:关闭移动端抹面组件;
42.步骤3.4:关闭行走主机。
43.本发明与现有技术相比,具有如下有益效果:
44.1、本发明的施工装置由于设有移动端抹面组件,能沿线轨在行走主机和行走分机之间往返移动,并通过底部设置的初平面板和精平面板实现对混凝土面的初平和精平抹面作业,相比人工抹面作业能大大提高抹面的效率和质量;同时,通过移动端抹面组件的自动抹面作业,避免了上人抹面作业对混凝土面成品的二次破坏,也避免了混凝土面上踩踏凹
陷填充的质量问题,相关工序的施工效率可提升30%,经济效益提升50%。
45.2、本发明的施工装置由于设有行走主机和行走分机,能带动移动端抹面组件同步行走,使初平面板和精平面板沿混凝土面宽度平移抹面后沿混凝土面的长度方向移动,实现工作面的自动转移,确保对整个混凝土面的自动化、持续性抹面施工,提高了混凝土面的抹面施工效率和质量,结构简单、紧凑,能减少施工设备和材料堆放造成的场地交通占用,相关工序的施工效率能提升40%,经济效益能提升40%。
46.3、本发明的施工方法由于采用plc控制,能实现同步信号、计时信号、通电信号、控制信号、动作逻辑、动作执行定时的自动化协同控制,以实现行走主机、行走分机和移动端抹面组件的移动,无需人工干预,实现混凝土面的自动化抹面作业,相关工序的施工效率可提升60%,经济效益可提升30%。
附图说明
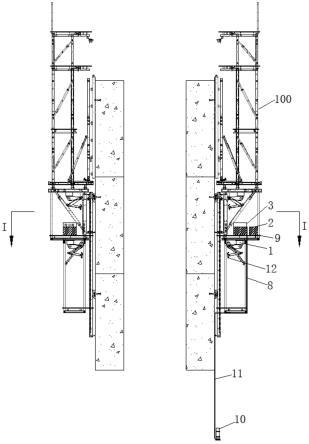
47.图1是本发明自动化混凝土抹面施工装置的结构示意图;
48.图2是本发明自动化混凝土抹面施工装置中行走主机的结构示意图(一侧视角);
49.图3是本发明自动化混凝土抹面施工装置中行走主机的结构示意图(另一侧视角);
50.图4是本发明自动化混凝土抹面施工装置中行走分机的结构示意图(一侧视角);
51.图5是本发明自动化混凝土抹面施工装置中行走分机的结构示意图(另一侧视角);
52.图6是本发明自动化混凝土抹面施工装置中移动端抹面组件的结构示意图(一侧视角);
53.图7是本发明自动化混凝土抹面施工装置中移动端抹面组件的结构示意图(另一侧视角);
54.图8是本发明自动化混凝土抹面施工装置中移动端抹面组件与行走主机的交互示意图;
55.图9是本发明自动化混凝土抹面施工装置中移动端抹面组件与行走分机的交互示意图;
56.图10是本发明自动化混凝土抹面施工方法的流程图。
57.图中,1行走主机,101主机外壳,102主机移动轮,103主机齿轮,104第二驱动器,105主机传动皮带,106电磁铁,2行走分机,201分机外壳,202分机移动轮,203分机齿轮,204第三驱动器,205分机传动皮带,206光束反射镜,3移动端抹面组件,301抹面面板,3011初平面板,3012精平面板,302吸附侧杆,304抹面外壳,3041抹面上外壳,3042抹面下外壳,3043转动轴,3044固定夹,305伸缩立柱,306上线轨轮,307下线轨轮,308第四驱动件,309从传动齿轮,310线轨驱动皮带,311主传动齿轮,4线轨,41线轨导盖,501第一驱动器,502绕线筒,503绕线轴,504线轨制动器,505调节槽,506调节杆,507定位件。
具体实施方式
58.下面结合附图和具体实施例对本发明作进一步说明。
59.请参见附图1、附图6和附图7,一种自动化混凝土抹面施工装置,包括行走主机1、
行走分机2、移动端抹面组件3和线轨4;行走主机1和行走分机2内均设有绕线组件,线轨4的两端分别通过绕线组件与行走主机1和行走分机2连接;行走主机1和行走分机2分别设置在混凝土面的两侧,行走主机1与行走分机2无线连接并沿混凝土面的边缘处同步移动,且线轨4张紧设置在混凝土面的上方;移动端抹面组件3的底部设有抹面面板301,抹面面板301设置在混凝土面上,移动端抹面组件3内设有线轨移动组件,线轨4贯穿移动端抹面组件3并与线轨移动组件可滑动接触式连接,使移动端抹面组件3能通过线轨移动组件沿线轨4滑动,且抹面面板301在混凝土面上进行抹面作业。移动端抹面组件3沿线轨4在行走主机1和行走分机2之间来回移动,实现对混凝土面的抹面作业,同时行走主机1、行走分机2、移动端抹面组件3同步移动,完成整个混凝土面的抹面作业。
60.行走主机1和行走分机2内的绕线组件的结构和布置方式相同。请参见附图2至附图5,所述的绕线组件包括第一驱动器501、绕线筒502、绕线轴503、线轨调节机构和线轨制动器504;在行走主机1内,第一驱动器501固定安装在行走主机1内,第一驱动器501的第一开关按钮安装在行走主机1上,第一驱动器501的输出端与绕线筒502的一端同轴连接且同步转动,绕线轴503的一端可转动式同轴插接在绕线筒502的另一端内,绕线轴503的另一端固定安装在行走主机1内;线轨调节机构可升降式安装在行走主机1内,线轨制动器504安装在线轨调节机构上,线轨4的一端通过线轨制动器504绕置在绕线筒502上;在行走分机2内,第一驱动器501固定安装在行走分机2内,第一驱动器501的第一开关按钮安装在行走分机2上,第一驱动器501的输出端与绕线筒502的一端同轴连接且同步转动,绕线轴503的一端可转动式同轴插接在绕线筒502的另一端内,绕线轴503的另一端固定安装在行走分机2内;线轨调节机构可升降式安装在行走分机2内,线轨制动器504安装在线轨调节机构上,线轨4的另一端通过线轨制动器504绕置在绕线筒502上。打开第一开关按钮,第一驱动器501通电,第一驱动器501可采用具有正反转功能电机,电机带动绕线筒502正向转动,实现对绕置在绕线筒502上的线轨4的释放,电机带动绕线筒502反向转动,实现将线轨4绕置在绕线筒502上,保证线轨4在行走主机1与行走分机2之间的张紧设置。绕线轴503用于保持绕线筒502的转动同轴度,线轨制动器504可对线轨4实现夹紧制动,防止线轨4张紧后松动。
61.行走主机1和行走分机2内的线轨调节机构的结构和布置方式相同。请参见附图2至附图5,所述的线轨调节机构包括调节槽505、调节杆506和定位件507;在行走主机1内,调节槽505竖向设置在行走主机1的两侧壁上,调节杆506的两端分别通过调节槽505与行走主机1可滑动式连接,并通过定位件507锁紧在行走主机1上;在行走分机2内,调节槽505竖向设置在行走分机2的两侧壁上,调节杆506的两端分别通过调节槽505与行走分机2可滑动式连接,并通过定位件507锁紧在行走分机2上。沿调节槽505上下调节调节杆506的高度,从而调整线轨4端部的高度,调节到位后通过螺栓螺母等定位件507将调节杆506锁定在行走主机1和行走分机2内。
62.请参见附图2、附图3和附图8,所述的行走主机1包括主机外壳101、主机移动轮102、主机齿轮103、第二驱动器104、主机传动皮带105和控制组件;若干个主机移动轮102和若干个主机齿轮103分别通过轮轴可转动式安装在主机外壳101的底部四周,主机齿轮103与主机移动轮102一一对应且同步转动;第二驱动器104设置在主机外壳101内,第二驱动器104的输出轴与位于主机外壳101一端的主机齿轮103同轴连接且同步转动,位于主机外壳101两端的两个主机齿轮103分别通过主机传动皮带105传动连接;控制组件安装在主机外
壳101内,控制组件能与移动端抹面组件3吸附连接并与行走分机2无线连接。优选的,主机移动轮102可采用橡胶轮胎,提高轮胎行走时的防滑效果,主机外壳101的前端两侧和后端两侧共设置四个主机移动轮102。第二驱动器104的第二按钮开关安装在主机外壳101上。第二驱动器104可采用双向输出电机,按下第二按钮开关,第二驱动器104通电转动,并带动主机外壳101前端两侧的主机齿轮103同步转动,在两根主机传动皮带105的带动下驱动四个主机移动轮102同步转动,实现行走主机1的行走功能。
63.请参见附图2、附图3和附图8,所述的控制组件包括plc控制器(图中未示出)、电磁铁106、定时器(图中未示出)、同步信号发送器(图中未示出)和电磁通电控制器(图中未示出);plc控制器的输出端分别与行走主机1内的第一驱动器501、第二驱动器104、同步信号发送器和电磁通电控制器的输入端连接,电磁通电控制器的输出端与电磁铁106连接,定时器的输出端与plc控制器的输入端连接;移动端抹面组件3内可抽拉式设有吸附侧杆302,吸附侧杆302能插入至主机外壳101内并吸附在电磁铁106上;同步信号发送器与行走分机2无线连接。电磁通电控制器的模式切换按钮嵌装在主机外壳101上,通过按下模式切换按钮,电磁铁通电控制器在常驻模式或延时模式之间切换:常驻模式下,电磁铁通电控制器控制电磁铁16始终处于通电工作状态,使其能与吸附侧杆302吸附连接,用于连接行走主机1与移动端抹面组件3;延时模式下,电磁铁通电控制器控制电磁铁16按照设定的延时时间间歇式通电工作,定时器可进行延时时间的计时。优选的,吸附侧杆302可采用铁等金属材质制成,保证同步移动时的强度和刚度。吸附侧杆302可采用抽屉滑轨或滑槽滑块式结构可抽拉式安装在移动端抹面组件3内,吸附侧杆302的端部可设置拉环,便于将吸附侧杆302抽出移动端抹面组件3或将吸附侧杆302缩回移动端抹面组件3内。
64.请参见附图4、附图5和附图9,所述的行走分机2包括分机外壳201、分机移动轮202、分机齿轮203、第三驱动器204、分机传动皮带105和同步信号接收器(图中未示出),若干个分机移动轮202和若干个分机齿轮203分别通过轮轴可转动式安装在分机外壳201的底部四周,分机齿轮203与分机移动轮202一一对应且同步转动;第三驱动器204设置在分机外壳201内,第三驱动器204的输出轴与位于分机外壳201一端的分机齿轮203同轴连接且同步转动,位于分机外壳201两端的两个分机齿轮203分别通过分机传动皮带105传动连接;同步信号接收器安装在分机外壳201内并与同步信号发送器无线连接。优选的,分机移动轮202可采用橡胶轮胎,提高轮胎行走时的防滑效果,主机外壳101的前端两侧和后端两侧共设置四个分机移动轮202。第三驱动器204的第三开关按钮嵌装在分机外壳201上。第三驱动器204可采用双向输出电机,按下第三按钮开关,第三驱动器204通电转动,并带动分机外壳201前端两侧的分机齿轮203同步转动,在两根分机传动皮带205的带动下驱动四个分机移动轮202同步转动,实现行走分机2的行走功能。同步信号接收器可接收同步信号发送器的同步信号,从而实现行走分机2与行走主机1的同步前进。
65.优选的,主机移动轮102和分机移动轮202上部可设置制动机构,由plc控制器控制,在移动端抹面组件3的平移过程中,通过制动机构锁定主机移动轮102和分机移动轮202,以保证抹面作业效果,制动机构仅在行走主机1和行走分机2同步前进时解除锁定。
66.请参见附图6至附图9,所述的移动端抹面组件3包括抹面外壳304和伸缩立柱305;抹面面板301通过伸缩立柱305设置在抹面外壳304的下方,吸附侧杆302设置在抹面外壳304的侧端并面向行走主机1设置;线轨移动组件设置在抹面外壳304内。伸缩立柱305可采
用多根不同规格的方钢依次套接构成,通过方钢之间的伸缩实现移动端抹面组件3的高度调节,以保证线轨4的水平穿设,方钢之间可采用插销、螺栓等方式锁定长度。
67.请参见附图6至附图9,所述的线轨移动组件包括上线轨轮306、下线轨轮307、第四驱动件308、从传动齿轮309、线轨驱动皮带310和主传动齿轮311;上线轨轮306、下线轨轮307和主传动齿轮311分别通过轮轴可转动式安装在抹面外壳304内,上线轨轮306与线轨4的上部可滑动接触式连接,下线轨轮307与线轨4的下部可滑动接触式连接;从传动齿轮309与下线轨轮307同轴连接并与主传动齿轮311啮合连接,第四驱动件308安装在抹面外壳304内,第四驱动件308的输出轴与主传动齿轮311的轮轴之间通过线轨驱动皮带310同步传动连接。上线轨轮306和下线轨轮307的表面可设置成弧面凹陷结构,以匹配贴合线轨4的表面。第四驱动件308的第四开关按钮可安装在抹面外壳304上,按下第四开关按钮,第四驱动件308通电运行通过线轨驱动皮带310并带动主传动齿轮311转动,主传动齿轮311驱动从传动齿轮309同步转动,从而带动下线轨轮307转动,利用线轨4与下线轨轮307之间的摩擦力使下线轨轮307沿线轨4滚动,从而推动移动端抹面组件3沿线轨4平移,上线轨轮306可起到辅助滚动和防止线轨4脱出的作用。上线轨轮306、下线轨轮307和从传动齿轮309均可设置两个,以保证对线轨4的稳定夹持控制。
68.优选的,第四驱动件308可采用双头三相异步电机,从两侧对下线轨轮307进行转动驱动控制,保证下线轨轮307的受力均匀和稳定转动。移动端抹面组件3平移达到返程距离后,双头三相异步电机的其中两相电流方向改变,实现双头三相异步电机的反向转动,以满足移动端抹面组件3的返程需求。
69.请参见附图6至附图9,所述的抹面面板301包括初平面板3011和精平面板3012,初平面板3011和精平面板3012上均设有翘边和斜段。初平面板3011和精平面板3012的长度可根据实际需要确定,可同时进行初平和精平抹面作业,精平面板3012的长度优选为700mm,初平面板3011的长度优选为1100mm,分机移动轮202和主机移动轮102的半径优选为111.4mm,使分机移动轮202和主机移动轮102滚动一圈的行走距离恰好为精平面板3012的长度,确保对整个混凝土面的精平抹面作业。
70.请参见附图4和附图5,所述的抹面外壳304上设光束收发器(图中未示出),行走分机2上设有光束反射镜206,光束收发器面向光束反射镜206设置。光束发射器可采用激光收发器,光束收发器的发射器向光束反射镜206发射激光束并接收由光束反射镜206反射的激光束,利用激光的收发可计算移动端抹面组件3与行走分机2之间的距离。通过设置返程距离(返程距离=混凝土面的宽度),控制移动端抹面组件3的平移距离,防止移动端抹面组件3从混凝土面上滑落,并确保抹面面板301对混凝土面的抹面作业没有遗漏和死角。
71.请参见附图6至附图9,所述的抹面外壳304包括抹面上外壳3041、抹面下外壳3042、转动轴3043和固定夹3044;上线轨轮306设置在抹面上外壳3041内,下线轨轮307设置在抹面下外壳3042内;抹面上外壳3041的底部一侧通过转动轴3043与抹面下外壳3042的顶部一侧可翻转开合式连接,抹面上外壳3041的底部另一侧通过固定夹3044与抹面下外壳3042的顶部另一侧活动连接;抹面上外壳3041与抹面下外壳3042连接呈l形结构,线轨4通过线轨导盖41活动设置在抹面下外壳3042上并贯穿入抹面外壳304内。抹面上外壳3041可打开,便于线轨4的穿设,抹面外壳304通过固定夹3044锁紧后可防止线轨4脱出,线轨导盖41便于线轨4的导向和限位。固定夹3044的数量可根据需要调整。
72.请参见附图10,一种自动化混凝土抹面施工方法,包括以下步骤:
73.请参见附图1至附图9,步骤1:在混凝土面的两侧分别布置行走主机1和行走分机2,在混凝土面上布置移动端抹面组件3,并在行走主机1与行走分机2之间布置贯穿移动端抹面组件3的线轨4。
74.所述的步骤1包括以下分步骤:
75.步骤1.1:释放绕置在行走主机1内的线轨4的一端,释放绕置在行走分机2内的线轨4的另一端。第一驱动器501带动绕线筒502正向转动,实现绕线筒502上线轨4的释放。
76.步骤1.2:将行走主机1和行走分机2分别设置在混凝土面的一端两侧,使行走主机1和行走分机2的行走方向相同,且线轨4位于行走主机1与行走分机2之间。
77.步骤1.3:将移动端抹面组件3设置在混凝土面上,且靠近行走主机1。
78.步骤1.4:将行走主机1内线轨4一端的高度、行走分机2内线轨4另一端的高度、以及移动端抹面组件3内线轨移动组件的高度调节至同一高度,使线轨4水平穿设在行走主机1、行走分机2和移动端抹面组件3之间。线轨4两端的高度调节方法是:沿调节槽505调节调节杆506的高度,并通过定位件507将调节杆506锁紧在主机外壳101和分机外壳201上。移动端抹面组件3内线轨4的高度调节方法是:通过伸缩立柱305的伸缩调节抹面下外壳3042内下线轨轮307的顶面高度,从而使线轨4的底面与下线轨轮307的顶面贴合,保证线轨4整体处于水平状态。
79.步骤1.5:通过绕线组件张紧线轨4,并通过固定夹3044锁紧移动端抹面组件3的抹面上外壳3041和抹面下外壳3042,使线轨4滑动接触式穿设在上线轨轮306与下线轨轮307之间。第一驱动器501带动绕线筒502反向转动,实现线轨4在绕线筒502上的绕置,使线轨4张紧在行走主机1与行走分机2之间。
80.步骤1.6:将移动端抹面组件3内的吸附侧杆302抽出并插入至行走主机1内,使吸附侧杆302与设置在行走主机1内的电磁铁106吸附连接。电磁铁106通过电磁通电控制器通电工作后能吸附连接吸附侧杆302,断电后能释放吸附侧杆302。
81.步骤2:依次启动行走主机1、行走分机2和移动端抹面组件3,使移动端抹面组件3沿线轨4从行走主机1向行走分机2平移,并通过抹面面板301对混凝土面进行抹面施工。
82.所述的步骤2包括以下分步骤:
83.步骤2.1:启动行走主机1和行走分机2,按下电磁通电控制器的模式切换按钮,使设置在行走主机1内的电磁铁106进入常驻模式。电磁铁106始终处于通电工作状态并能吸附连接吸附侧杆302。
84.步骤2.2:设置返程距离,启动移动端抹面组件3,通过线轨移动组件驱动移动端抹面组件3从行走主机1向行走分机2平移,同时通过抹面面板301对混凝土面进行一次抹面施工。第四驱动件308通过线轨驱动皮带310带动主传动齿轮311转动,主传动齿轮311带动从传动齿轮309同步转动,从传动齿轮309带动下线轨轮307转动,利用下线轨轮307与线轨4之间的摩擦力推动下线轨轮307沿线轨4滚动,从而实现移动端抹面组件3的平移。在移动端抹面组件3的平移过程中,光束收发器始终向光束反射镜206发射并接收光束,以实时监测移动端抹面组件3的平移距离。
85.步骤2.3:按下电磁通电控制器的模式切换按钮,使设置在行走主机1内的电磁铁106进入延时模式。延时模式下,电磁铁106的间歇式启动的时间间隔行走分机2和行走主机
1同步行走的时间,时间间隔可根据精平面板3012的长度确定,优选为30s,由定时器计时。
86.步骤2.4:移动端抹面组件3达到返程距离后,通过线轨移动组件驱动移动端抹面组件3从行走分机2向行走主机1平移,同时通过抹面面板301对混凝土面进行二次抹面施工。光束收发器向第四驱动件308发送信号,使第四驱动件308电流方向改变实现第四驱动件308的反转,从而实现移动端抹面组件3的返程。
87.步骤2.5:将设置在移动端抹面组件3内的吸附侧杆302抽出并插入至行走主机1内,使吸附侧杆302与设置在行走主机1内的电磁铁106吸附连接。吸附侧杆302触发plc控制器,plc控制器控制同步信号发送器启动,同时通过制动机构解除主机移动轮102和分机移动轮202的锁定。
88.步骤2.6:行走主机1通过同步信号发送器向行走分机2的同步信号接收器发送同步信号,行走主机1和行走分机2同步行走。主机移动轮102和分机移动轮202同步向前滚动一圈,滚动行程与精平面板3012的长度一致,使精平面板3012进入下一段抹面区域。
89.步骤2.7:行走主机1带动移动端抹面组件3同步行走,使移动端抹面组件3沿混凝土面移动一个抹面面板301的长度,行走完成后解除行走主机1与移动端抹面组件3的连接。在行走过程中通过plc控制器控制定时器计时,滚动一圈后计时结束,电磁铁106断电,从而解除对吸附侧杆302的吸附。
90.步骤2.8:重复步骤2.2至步骤2.7,直至完成整个混凝土面的抹面作业。
91.步骤3:依次关闭行走分机2、移动端抹面组件3和行走主机1。
92.所述的步骤3包括以下分步骤:
93.步骤3.1:在移动端抹面组件3最后一次从行走分机2向行走主机1平移时,关闭行走分机2。
94.步骤3.2:移动端抹面组件3最后一次与行走主机1吸附连接后,按下电磁通电控制器的模式切换按钮,使设置在行走主机1内的电磁铁106进入常驻模式。移动端抹面组件3通过吸附侧杆302与电磁铁106吸附连接,锁定行走主机1与移动端抹面组件3,防止移动端抹面组件3意外滑动而对抹面完成后的混凝土面造成二次破坏。
95.步骤3.3:关闭移动端抹面组件3。
96.步骤3.4:关闭行走主机1,即可将本发明的抹面施工装置从混凝土面上移走。
97.以上仅为本发明的较佳实施例而已,并非用于限定发明的保护范围,因此,凡在本发明的精神和原则之内所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。