1.本发明属于建筑施工设备领域,具体涉及一种适用于高空爬模中的自调节喷淋系统。
背景技术:
2.爬模是爬升模板的简称,国外也叫跳模。它由爬升模板、爬架(也有的爬模没有爬架)和爬升设备三部分组成,在施工剪力墙体系、筒体体系和桥墩筀等高耸结构中是一种有效的工具。由于具备自爬的能力,因此不需起重机械的吊运,这减少了施工中运输机械的吊运工作量。在自爬的模板上悬挂脚手架可省去施工过程中的外脚手架。综上,爬升模板能减少起重机械数量、加快施工速度,因此经济效益较好。
3.目前,对于爬模所施工的墙面,并没有一套同时对四个墙面进行喷洒作业的自动化的喷洒系统,采用的仍然是传统的人工喷洒,效率低,且喷洒的均匀性难以保证,即使在爬模中设置喷洒系统,但也是单独控制,难以做到统一化。
技术实现要素:
4.本发明的目的在于提供一种适用于高空爬模中的自调节喷淋系统,以解决现有技术中导致的上述缺陷。
5.一种适用于高空爬模中的自调节喷淋系统,包括设置于爬模中液压操作平台上的智能调控箱和储水箱,所述智能调控箱用于调控喷洒区域、喷洒水压、喷洒时间、喷洒频率、储水箱自动蓄水以及自动保存记录,位于液压操作平台下方的爬模上还设置有自动机械臂和吊平台,自动机械臂的末端安装有喷头,喷头借助于输水管道连接至储水箱,喷头上还安装有风速传感器,相邻两个爬模中的喷头之间也通过输水管道连接,相邻两个爬模中的输水管道之间通过快接接头连接,所述储水箱通过上设置于吊平台上的上水管道连接至高压水泵,高压水泵通过软管连接至水源,自动机械臂、风速传感器、高压水泵均连接至智能调控箱。
6.优选的,所述储水箱内设置有连接至智能调控箱的水位传感器。
7.优选的,所述储水箱的排水口处还连接有增压水泵,增压水泵设置于储水箱与输水管道之间。
8.优选的,相邻两个爬模中仅设置一个储水箱和一个增压水泵。
9.优选的,所述自动机械臂能够在智能调控箱的控制下自动调节长度和喷头喷洒的角度。
10.优选的,每个爬模中至少设置一个所述的自动机械臂。
11.本发明的优点在于:
12.1.本发明能够自动调节,自动喷洒、蓄水等无需人工进行操作,节约人工;
13.2.可设置固定的喷洒轨迹、自动调节水压,结构物能够全方位的保湿养护;
14.3.使用时具备较高的安全性和可靠性;
15.4.智能各项的监控,有效的保证了工作效率。
附图说明
16.图1为本发明在竖向方向的结构示意图。
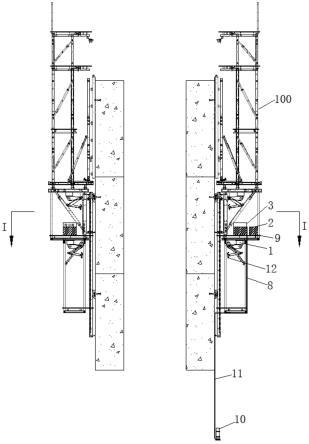
17.图2为图1中沿i-i方向的截面剖视图。
18.图3为本发明中自动机械臂的局部详图。
19.其中:1自动机械臂,2智能调控箱,3储水箱,4风速传感器,5输水管道,6快接接头,7增压水泵,8吊平台,9液压操作平台,10高压水泵,11上水管道,12喷头,100爬模。
具体实施方式
20.为使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本发明。
21.如图1至图3所示,一种适用于高空爬模中的自调节喷淋系统,包括设置于爬模100中液压操作平台9上的智能调控箱2和储水箱3,所述智能调控箱2用于调控喷洒区域、喷洒水压、喷洒时间、喷洒频率、储水箱3自动蓄水以及自动保存记录,位于液压操作平台9下方的爬模100上还设置有自动机械臂1和吊平台8,自动机械臂1的末端安装有喷头12,喷头12借助于输水管道5连接至储水箱3,喷头12上还安装有风速传感器4,相邻两个爬模100中的喷头12之间也通过输水管道5连接,相邻两个爬模100中的输水管道5之间通过快接接头6连接,所述储水箱3通过上设置于吊平台8上的上水管道11连接至高压水泵10,高压水泵10通过软管连接至水源,所述储水箱3的排水口处还连接有增压水泵7,增压水泵7设置于储水箱3与输水管道5之间,自动机械臂1、风速传感器4、高压水泵10、增压水泵7均连接至智能调控箱2。
22.在本实施例中,所述储水箱3内设置有连接至智能调控箱2的水位传感器,用于监测储水箱3内的水位。
23.在本实施例中,相邻两个爬模100中仅设置一个储水箱3和一个增压水泵7,无需在每个爬模100中均设置,这样可以节省成本。
24.在本实施例中,所述自动机械臂1能够在智能调控箱2的控制下自动调节长度和喷头12喷洒的角度,以便于对墙面进行全方位无死角的喷洒。
25.在本实施例中,每个爬模100中至少设置一个所述的自动机械臂1,1一般根据待施工的墙面面积大小确定自动机械臂1的数量。
26.本发明的喷淋方法如下:
27.s1:智能调控箱2根据获取的现场风速参数,调整喷洒方案,打开储水箱3的排水阀,开启增压水泵7开始对墙面进行喷洒作业,喷洒完成后,断开相邻两个爬模100中的输水管道5之间的快接接头6,当储水箱3内的水位下降至预设值时,智能调控箱2打开高压水泵10,向储水箱3内补水;
28.s2:爬模100上升并调节好高度后,使得四个墙面的爬模100的高度相同,重新连接相邻两个爬模100中的输水管道5,借助于智能调控箱2继续控制喷头12对墙面进行喷洒作业。
29.由技术常识可知,本发明可以通过其它的不脱离其精神实质或必要特征的实施方
案来实现。因此,上述公开的实施方案,就各方面而言,都只是举例说明,并不是仅有的。所有在本发明范围内或在等同于本发明的范围内的改变均被本发明包含。
技术特征:
1.一种适用于高空爬模中的自调节喷淋系统,其特征在于,包括设置于爬模(100)中液压操作平台(9)上的智能调控箱(2)和储水箱(3),所述智能调控箱(2)用于调控喷洒区域、喷洒水压、喷洒时间、喷洒频率、储水箱(3)自动蓄水以及自动保存记录,位于液压操作平台(9)下方的爬模(100)上还设置有自动机械臂(1)和吊平台(8),自动机械臂(1)的末端安装有喷头(12),喷头(12)借助于输水管道(5)连接至储水箱(3),喷头(12)上还安装有风速传感器(4),相邻两个爬模(100)中的喷头(12)之间也通过输水管道(5)连接,相邻两个爬模(100)中的输水管道(5)之间通过快接接头(6)连接,所述储水箱(3)通过上设置于吊平台(8)上的上水管道(11)连接至高压水泵(10),高压水泵(10)通过软管连接至水源,自动机械臂(1)、风速传感器(4)、高压水泵(10)均连接至智能调控箱(2)。2.根据权利要求1所述的一种适用于高空爬模中的自调节喷淋系统,其特征在于,所述储水箱(3)内设置有连接至智能调控箱(2)的水位传感器。3.根据权利要求1所述的一种适用于高空爬模中的自调节喷淋系统,其特征在于,所述储水箱(3)的排水口处还连接有增压水泵(7),增压水泵(7)设置于储水箱(3)与输水管道(5)之间。4.根据权利要求3所述的一种适用于高空爬模中的自调节喷淋系统,其特征在于,相邻两个爬模(100)中仅设置一个储水箱(3)和一个增压水泵(7)。5.根据权利要求1所述的一种适用于高空爬模中的自调节喷淋系统,其特征在于,:所述自动机械臂(1)能够在智能调控箱(2)的控制下自动调节长度和喷头(12)喷洒的角度。6.根据权利要求1所述的一种适用于高空爬模中的自调节喷淋系统,其特征在于,每个爬模(100)中至少设置一个所述的自动机械臂(1)。7.根据权利要求4所述的一种适用于高空爬模中的自调节喷淋系统,其特征在于,上述喷淋系统的喷淋方法包括如下步骤:s1:智能调控箱(2)根据获取的现场风速参数,调整喷洒方案,打开储水箱(3)的排水阀,开启增压水泵(7)开始对墙面进行喷洒作业,喷洒完成后,断开相邻两个爬模(100)中的输水管道(5)之间的快接接头(6);s2:爬模(100)上升并调节好高度后,使得四个墙面的爬模(100)的高度相同,重新连接相邻两个爬模(100)中的输水管道(5),借助于智能调控箱(2)继续控制喷头(12)对墙面进行喷洒作业。
技术总结
本发明公开了一种适用于高空爬模中的自调节喷淋系统,涉及建筑施工设备领域,包括设置于爬模中液压操作平台上的智能调控箱和储水箱,位于液压操作平台下方的爬模上还设置有自动机械臂和吊平台,自动机械臂的末端安装有喷头,喷头借助于输水管道连接至储水箱,喷头上还安装有风速传感器,所述储水箱通过上设置于吊平台上的上水管道连接至高压水泵,高压水泵通过软管连接至水源,自动机械臂、风速传感器、高压水泵均连接至智能调控箱,本发明能够自动调节,自动喷洒、蓄水等无需人工进行操作,节约人工,可设置固定的喷洒轨迹、自动调节水压,结构物能够全方位的保湿养护。结构物能够全方位的保湿养护。结构物能够全方位的保湿养护。
技术研发人员:杨康 章文彬 董高钟 沈马可 欧代军 沈飞龙 俞嘉炜 吴青松 谢德宽 李传友 郭龙 张攀昆 王慧可 李建明 李成 张奎
受保护的技术使用者:中交二航局第四工程有限公司
技术研发日:2022.03.04
技术公布日:2022/6/28
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。