1.本发明涉及海工装备中的探测装置,尤其涉及一种海底电缆路径探测装置和方法以及电缆故障定位方法。
背景技术:
2.近年来,海洋资源的开发日益得到关注,其中包括对海上风力发电的开发和研究。海上风电项目前景广阔,同时对于海上风电场相关设备的维护也提出了更高的要求。
3.海底电缆承担着电力的输送,因此对海底电缆的维护也十分重要。由于电缆铺设在海底,而海底环境又十分复杂,因此,在海底电缆发生故障后,如何对故障进行探测和定位是一个难题。
4.梁育雄,王升(专利号:cn110794262a)等人提出了一种海底电缆故障精确定点系统,该系统包括定点模块、声磁同步检测模块、磁场强度探测模块、故障点自动解析模块和数据分析模块,该发明能够快速地对长距离海底电缆故障点进行精确定点,提高故障点查找效率。但是,该发明是沿着海底电缆原来铺设的路径进行探测的,由于海底电缆长期服务于复杂的海底环境,会导致其偏离原来铺设的路径,此时该系统方法对海底电缆故障探测和定位的适用性不足。
技术实现要素:
5.发明目的:本发明的目的在于克服现有技术的不足,提供一种海底电缆路径探测装置和方法以及电缆故障定位方法,并且对海底电缆的故障点进行快捷定位,避免海底电缆的实际线路偏离原来铺设的线路所造成的维修困难。
6.技术方案:本发明海底电缆路径探测装置包括探测船、总控模块、船舵控制模块、定位及信息传输系统、电缆路径探测组件、故障探测组件和陆上集控中心;
7.电缆路径探测组件包括电缆路径探测模块和第一磁场探测装置;第一磁场探测装置包括第一感应线圈、第二感应线圈和第三感应线圈;第二感应线圈的中心轴线与探测船前进方向一致;第一感应线圈和第三感应线圈对称布置于第二感应线圈的两侧;故障探测组件包括故障定位模块和第二磁场探测装置。
8.故障定位模块包括第四感应线圈,第四感应线圈的中心轴线与探测船的底板垂直。
9.本发明海底电缆路径探测方法包括以下步骤:
10.(1)总控模块向电缆路径探测模块发送指令,探测船在电缆入水处出发并向电缆两侧调整船头方向,在调整的过程中,第二感应线圈探测周围磁场,电缆路径探测模块储存第二感应线圈探测到的最小感应电势e
2min
;当第二感应线圈测得的瞬时感应电势时,则海底电缆走向与第二感应线圈的轴线平行,表示探测船与电缆走向一致;
11.(2)电缆路径探测模块将第一感应线圈测得的感应电势e1与第三感应线圈测得的
感应电势e3的比值反馈给船舵控制模块,并控制舵叶来调整探测船与电缆走向一致;
12.(3)探测船调整走向后,重复步骤(1)至步骤(2)探测。
13.步骤(1)中的瞬时感应电势
14.其中,为海底电缆中交流电产生的磁感应强度的变化率,s为第二感应线圈通过磁感线的有效面积。
15.步骤(2)中,当第一感应线圈测得的感应电势e1与第三感应线圈测得的感应电势e3的比值时,探测船与电缆走向一致。
16.步骤(2)中,若船舵控制模块接收到电缆路径探测模块反馈的数据则船舵控制模块控制探测船向第一感应线圈处的方向偏转。
17.步骤(2)中,若船舵控制模块接收到电缆路径探测模块反馈的数据则船舵控制模块控制探测船向第三感应线圈处的方向偏转。
18.本发明海底电缆故障定位方法包括以下步骤:
19.(1)总控模块向电缆路径探测模块发送指令,探测船在电缆入水处出发并向电缆两侧调整船头方向,在调整的过程中,第二感应线圈探测周围磁场,电缆路径探测模块储存第二感应线圈探测到的最小感应电势e
2min
;当第二感应线圈测得的瞬时感应电势ei=e
2min
时,则海底电缆走向与第二感应线圈的轴线平行,表示探测船与电缆走向一致;
20.(2)电缆路径探测模块将第一感应线圈测得的感应电势e1与第三感应线圈测得的第三感应电势e3的比值反馈给船舵控制模块,并控制舵叶来调整探测船与电缆方向一致;
21.(3)探测船从入水处行驶至与海底电缆的走向一致时,将故障定位模块的第四感应线圈测得的感应电势e4作为阈值存储到故障定位模块中,探测船探测至第四感应线圈与海底电缆的最大距离后,若第四感应线圈测得的瞬时感应电势ei=0,则判断海底电缆的故障发生在探测船入水处;若瞬时感应电势ei≠0,则探测船继续探测直至瞬时感应电势ei=0时,定位及信息传输系统把ei=0的处的坐标p
1i
和上一个瞬时感应电势ei等于阈值e4的坐标p
2i
传输给陆上集控中心,所述p
2i
到p
1i
之间为一个故障区间。
22.步骤(3)中,第四感应线圈与海底电缆的最大距离
23.其中,u0为磁导率,b
min
为第四感应线圈探测的最小磁场强度,i为海底电缆中的电流强度。
24.步骤(3)中,坐标p
2i
为坐标p
1i
之前的距离p
1i
最近的点。
25.工作原理:海水对mhz以上的高频电磁场有很强的屏蔽作用,电磁场传播的距离很近,不利于进行探测,而对于300hz以下低频或极低频电磁场则传播很远,有效范围达数百米。本发明通过对海底电缆的故障相施加低频电压,使电缆周围海域产生交变磁场,进而对海底电缆的走向进行探测和判断。
26.有益效果:与现有技术相比,本发明具有以下优点:
27.(1)本发明通过采用海底电缆探测装置对海底电缆的具体走向进行探测和判断,
克服了当海底电缆的实际线路偏离原来铺设的线路而造成的对其检修不便的技术缺陷,并节省了时间,提高了效率。
28.(2)本发明的电缆故障定位方法,运用磁场探测装置和数据存储及分析的方法快捷的对海底电缆进行探测,并且对故障点定位,克服了以往对海底电缆故障点确定的耗时耗力且故障点定位准确率不高的问题,达到了节省时间,节省人力,且故障点定位的准确率高。
附图说明
29.图1为本发明的海底电缆探测装置及故障定位方法原理图;
30.图2为本发明的电缆路径探测模块中的第一磁场探测装置及布置方式图;
31.图3为本发明的故障定位模块中的第二磁场探测装置布置方式图;
32.图4为本发明的电缆路径探测和故障定位方法流程图;
33.图5为本发明的第一磁场探测装置8的第一种探测状态俯视图;
34.图6为本发明的第一磁场探测装置8的第二种探测状态俯视图;
35.图7为本发明的第一磁场探测装置8的第三种种探测状态俯视图;
36.图8为第一磁场探测装置8的感应线圈的具体布置方式俯视图。
具体实施方式
37.如图1所示,本发明海底电缆探测装置包括探测船、电源模块1、总控模块2、电缆路径探测模块3、船舵控制模块4、故障定位模块5、gps定位及信息传输系统6,舵叶7,第一磁场探测装置8、第二磁场探测装置9和陆上集控中心10。
38.其中,电源模块1为整个海底电缆探测装置提供电能,总控模块2与电缆路径探测模块3、船舵控制模块4、故障定位模块5、gps定位及信息传输系统6通过接口与通讯线连接实现数据通讯。电缆路径探测模块3与船舵控制模块4通过接口和通讯线传输数据,实现信息交互。电缆路径探测模块3与第一磁场探测装置8用导线连接。船舵控制模块4与舵叶7通过如齿轮传动或其它机械结构进行连接传动。故障定位模块5与gps定位及信息传输系统6通过接口与通讯线实现数据传输通讯。故障定位模块5与第二磁场探测装置9通过导线连接。gps定位及信息传输系统6与陆上集控中心10通过远程信息传输实现信息的传输。
39.图2为第一磁场探测装置8的具体结构,该第一磁场探测装置8包括第一感应线圈81、第二感应线圈82和第三感应线圈83。如图8所示,第一感应线圈81,第二感应线圈82和第三感应线圈83的布置方式为:第二感应线圈82的平面垂直于探测船底板平面,且线圈中心轴线方向与探测船前进方向一致。第一感应线圈81和第三感应线圈83布置于第二感应线圈82的两侧。
40.参见图8,第一感应线圈81和第三感应线圈83的所在平面与第二感应线圈82的所在平面分别成45度夹角。且第一感应线圈81,第二感应线圈82,第三感应线圈83所形成的平面都与探测船底板平面垂直。
41.第一磁场探测装置8的第一感应线圈81,第二感应线圈82和第三感应线圈83与电缆路径探测模块3通过导线连接。
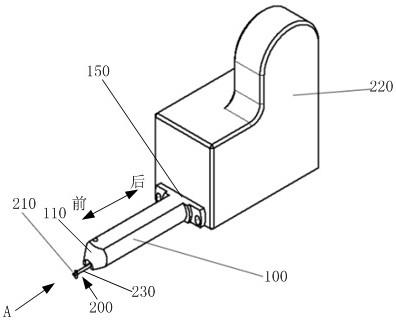
42.图3中,第二磁场探测装置9由第四感应线圈91构成。第四感应线圈91的布置方式
为:第四感应线圈91的中心轴线与探测船底板的平面垂直。第二磁场探测装置9的第四感应线圈91与故障定位模块5通过导线连接。
43.第一感应线圈81,第二感应线圈82,第三感应线圈83,第四感应线圈91的大小、尺寸均相同,均由粗细相同的细铜丝绕n匝所制,外径为d,内径为d,厚度为h,具体尺寸以实际情况能探测到海底电缆所产生的磁场为宜。
44.第一感应线圈81,第二感应线圈82,第三感应线圈83或第四感应线圈91探测到的与海底电缆的最大距离为:其中,u0为磁导率,b
min
为第一感应线圈81,第二感应线圈82,第三感应线圈83或第四感应线圈91探测的最小磁场强度,i为海底电缆中的电流强度。
45.本实施例中,探测船在电缆入水处的海面出发,并且在海底电缆一侧沿电缆路径方向匀速向前探测。
46.故障定位模块5和电缆路径探测模块3的工作是相互独立的,总控模块2向故障定位模块5和电缆路径探测模块3同时发送指令。
47.电缆路径探测模块3和故障定位模块5的工作流程如图4所示。
48.海底电缆探测装置对海底电缆走向的探测过程包括以下步骤:
49.(1)总控模块2向电缆路径探测模块3发送指令,电缆路径探测模块3开始工作,电缆路径探测模块3的工作过程包括如下步骤:
50.(1.1)如图8所示,为探测船入水后的初始方向,向左90
°
调整探测船船头的方向,再使探测船船头方向调整回初始方向后,再向右90
°
调整探测船船头的方向,然后再调整回初始方向,在整个调整探测船船头方向的过程中,第一磁场探测装置8的第二感应线圈82探测周围磁场,电缆路径探测模块3储存此过程中探测到的最大感应电势e
2max
和最小感应电势e
2min
,并把e
2max
和e
2min
作为第二感应线圈82的阈值。
51.第一磁场探测装置8中第一感应线圈、第二感应线圈或第三感应线圈探测周围磁场时的瞬时感应电势为:式
②
中,为海底电缆中交流电产生的磁感应强度的变化率,s为封闭线圈通过磁感线的有效面积。当第二感应线圈82测得的瞬时感应电势ei=e
2max
时,此时第二感应线圈82的通过磁感线的有效面积最大,则此时海底电缆走向与第二感应线圈82的中心轴线垂直。当第二感应线圈82测得瞬时感应电势ei=e
2min
时,此时第二感应线圈82的通过磁感线的有效面积最小,则此时海底电缆走向与第二感应线圈82的中心轴线平行。
52.(1.2)通过步骤(1.1)中的方法找到第二感应线圈82的中心轴线与海底电缆走向平行的探测船的行驶方向,此时探测船的行驶方向与海底电缆的走向一致,然后继续向前探测。
53.(1.3)如图5所示,本发明海底电缆探测装置继续向前探测,此时第一感应线圈81测到的感应电势e1与第三感应线圈83测得的感应电势e3相等,e1=e3,此时第一感应线圈81和第三感应线圈83的通过磁感线的有效面积相等。
54.参见图6,当海底电缆的走向为向左偏,即向第一感应线圈81的方向偏移,此时第一感应线圈81的通过磁感线的有效面积增大,第三感应线圈83的通过磁感线的有效面积减小,此时第一感应线圈81测到的感应电势e1与第三感应线圈83测得的感应电势e3的比值
55.如图7所示,当海底电缆的走向为向右偏时,即向第三感应线圈的方向偏移,此时第一感应线圈81的通过磁感线的有效面积减小,第三感应线圈83的通过磁感线的有效面积增大,此时第一感应线圈81测得的感应电势e1与第三感应线圈83测得的感应电势e3的比值电缆路径探测模块3通过计算e1/e3的比值,来判断海底电缆的走向。
56.(1.4)电缆路径探测模块3通过第一磁场探测装置8判断出海底电缆的走向后,将第一感应线圈81测到的感应电势e1与第三感应线圈83测得的感应电势e3的比值数据通过接口和通讯线反馈给船舵控制模块4,船舵控制模块4经过分析再通过机械结构控制舵叶7,调整探测船的航向。船舵控制模块4的具体分析过程为:
57.(1.4.1)若船舵控制模块4接收到电缆路径探测模块3传输的e1/e3的比值数据大于1,则船舵控制模块4通过控制舵叶7使得探测船向左偏转,即向第一感应线圈方向偏转。
58.(1.4.2)若船舵控制模块4接收到电缆路径探测模块3传输的e1/e3的比值数据小于1,则船舵控制模块4通过控制舵叶7使得探测船向右偏转,即向第三感应线圈方向偏转。
59.(1.5)探测船每次调整航向后,重复步骤(1.1)到步骤(1.4),并按此方法探测下去。
60.本发明海底电缆探测装置的故障定位方法包括以下步骤:
61.(1)总控模块2向故障定位模块5发送指令,故障定位模块5开始工作。通过步骤(1.1)和(1.2)找到探测船的行驶方向与海底电缆的走向一致的行驶方向。本实施例中,探测船从刚入水的近岸位置开始行驶直至探测船的行驶方向与海底电缆的走向一致,此时与故障定位模块5相连接的第二磁场探测装置9的第四感应线圈91开始从此位置探测周围磁场,并将第四感应线圈91此时测得的感应电势e4存储到故障定位模块5中,故障定位模块5随时存储测得的感应电势,探测船继续向前探测一段距离(该距离为第四感应线圈91能探测到的与海底电缆的最大距离,该最大距离由式
①
决定)后,根据最大距离时的位置处所测得的瞬时感应电势的情况,分为以下两种海底电缆的故障定位方法:
62.(2.1)当探测船从刚入水的位置向前探测一段距离(该距离为第四感应线圈91探测到的与海底电缆的最大距离,该最大距离由式
①
决定)后,此位置所测到的瞬时感应电势ei=0,则判断海底电缆的故障位置发生在探测船刚入水的近岸位置,此时定位的故障位置为一个故障点,即探测船从刚入水的位置探测。
63.(2.2)当探测船从刚入水的位置向前探测一段距离(该距离为第四感应线圈91探测到的与海底电缆的最大距离,该最大距离由式
①
决定)后,此位置所测到的瞬时感应电势ei≠0,则说明海底电缆的故障位置不发生在探测船刚入水的近岸位置,则将探测船在刚入水的位置时第四感应线圈91测得的感应电势e4设置为故障定位模块5的阈值。
64.第二磁场探测装置9继续向前探测,故障定位模块5通过接口和通讯线gps定位及信息传输系统6发送记录位置坐标信息的指令,gps定位及信息传输系统6开始以设定的频率记录探测船的瞬时位置坐标信息pi,并把瞬时位置坐标信息pi传输给故障定位模块5,故障定位模块5把第二磁场探测装置9测得的瞬时感应电势ei和gps定位及信息传输系统6传输过来的瞬时位置坐标信息pi对应存储。
65.当第二磁场探测装置9测得的瞬时感应电势ei=0时,此时故障定位模块5将把此位置的位置坐标信息p
1i
和前一个探测船位置坐标信息p
2i
(探测船位置坐标信息p
2i
为位置坐标信息p
1i
之前的且距离p
1i
最近的点,且第二磁场探测装置9在位置坐标信息p
2i
处测得的瞬时感应ei等于阈值e4)反馈传输给gps定位及信息传输系统6,gps定位及信息传输系统6把位置坐标信息p
1i
和p
2i
通过远程信息传输给陆上集控中心10。此时定位的故障位置为一个故障区间,即p
1i
和p
2i
位置之间的区域即为海底电缆故障发生的位置区间。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。