技术特征:
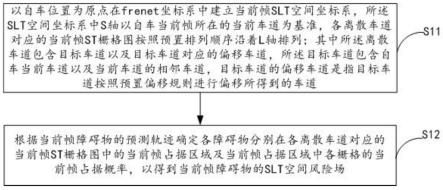
1.一种障碍物slt空间风险场建模方法,其特征在于,包括:以自车位置为原点在frenet坐标系中建立当前帧slt空间坐标系,所述slt空间坐标系中s轴以自车当前帧所在的当前车道为基准,各离散车道对应的当前帧st栅格图按照预置排列顺序沿着l轴排列;其中所述离散车道包含目标车道以及目标车道对应的偏移车道,所述目标车道包含自车当前车道以及当前车道的相邻车道,目标车道的偏移车道是指目标车道按照预置偏移规则进行偏移所得到的车道;根据当前帧障碍物的预测轨迹确定各障碍物分别在各离散车道对应的当前帧st栅格图中的当前帧占据区域及当前帧占据区域中各栅格的当前帧占据概率,以得到当前帧障碍物的slt空间风险场。2.根据权利要求1所述的方法,其特征在于,根据当前帧障碍物的预测轨迹确定各障碍物分别在各离散车道对应的当前帧st栅格图中的当前帧占据区域及当前帧占据区域中各栅格的当前帧占据概率,具体包括:针对每个离散车道,执行以下步骤:分别根据各障碍物的预测轨迹和所述离散车道的中心线,从各障碍物中确定出关注障碍物;针对每个关注障碍物,根据关注障碍物的预测轨迹和所述离散车道的中心线确定出所述关注障碍物与离散车道发生冲突的st区域;根据所述st区域确定所述关注障碍物在所述离散车道的当前帧st栅格图中的当前帧占据区域;计算所述离散车道对应的当前帧st栅格图中的当前帧占据区域中各占据栅格的当前帧占据概率。3.根据权利要求2所述的方法,其特征在于,分别根据各障碍物的预测轨迹和所述离散车道的中心线,从各障碍物中确定出关注障碍物,具体包括:确定所述离散车道对应的第一道路序列;针对每一个障碍物,确定所述障碍物的预测轨迹对应的第二道路序列,判断所述第一道路序列和第二道路序列是否存在潜在冲突,若是则确定所述障碍物为关注障碍物,若否则确定所述障碍物为非关注障碍物。4.根据权利要求2所述的方法,其特征在于,根据所述st区域确定所述关注障碍物在所述离散车道的当前帧st栅格图中的当前帧占据区域,具体包括:将所述st区域栅格离散化到所述离散车道对应的当前帧st栅格图中得到第一预估占据区域;将所述关注障碍物在所述离散车道对应的前一帧st栅格图中的前一帧占据区域投影到所述离散车道对应的当前帧st栅格图中得到第二预估占据区域;根据所述第一预估占据区域和第二预估占据区域确定出所述关注障碍物在所述离散车道的当前帧st栅格图中的当前帧占据区域。5.根据权利要求4所述的方法,其特征在于,将所述st区域栅格离散化到所述离散车道对应的当前帧st栅格图中得到第一预估占据区域,具体包括:将所述st区域进行横向离散得到横向离散区域,将所述横向离散区域栅格离散化到所述离散车道对应的当前帧st栅格图中得到预估横向占据区域;将所述st区域进行纵向离散得到至少一个纵向离散区域,将各纵向离散区域分别栅格
离散化到所述离散车道对应的当前帧st栅格图中得到相应的预估纵向占据区域;根据所述预估横向占据区域和各预估纵向占据区域确定出所述关注障碍物在所述离散车道对应的当前帧st栅格图中的第一预估占据区域。6.根据权利要求5所述的方法,其特征在于,计算所述离散车道对应的当前帧st栅格图中的当前帧占据区域中各栅格的当前帧占据概率,具体包括:针对每个关注障碍物,计算该关注障碍物的预估横向占据区域中各栅格的横向占据概率;以及,计算该关注障碍物的各预估纵向占据区域中各栅格的纵向占据概率;针对关注障碍物在所述离散车道对应的当前帧st栅格图中的第一预估占据区域中的每个栅格,将所述栅格的横向占据概率和纵向占据概率进行叠加得到所述栅格的当前帧预测轨迹概率;针对所述离散车道对应的当前帧st栅格图中的每个占据栅格,根据各障碍物在所述离散车道对应的当前帧st栅格图中的当前帧占据区域,确定出每个占据栅格对应的至少一个目标动态障碍物;根据各目标动态障碍物分别占据所述占据栅格的当前帧预测轨迹概率和预置的最大占据概率,确定所述占据栅格的当前帧预估占据概率;根据所述占据栅格的当前帧预估占据概率和所述占据栅格的前一帧占据概率计算得到所述占据栅格的当前帧占据概率。7.一种障碍物slt空间风险场建模装置,其特征在于,包括:slt空间坐标系构建模块,用于以自车位置为原点在frenet坐标系中建立当前帧slt空间坐标系,所述slt空间坐标系中s轴以自车当前帧所在的当前车道为基准,各离散车道对应的当前帧st栅格图按照预置排列顺序沿着l轴排列;其中所述离散车道包含目标车道以及目标车道对应的偏移车道,所述目标车道包含自车当前车道以及当前车道的相邻车道,目标车道的偏移车道是指目标车道按照预置偏移规则进行偏移所得到的车道;障碍物slt空间风险场构建模块,用于根据当前帧障碍物的预测轨迹确定各障碍物分别在各离散车道对应的当前帧st栅格图中的当前帧占据区域及当前帧占据区域中各栅格的当前帧占据概率,以得到当前帧障碍物的slt空间风险场。8.一种存储介质,存储有计算机程序,其特征在于,该程序被处理器执行时实现权利要求1-6中任一项所述方法的步骤。9.一种包含指令的计算机程序产品,其特征在于,当所述计算机程序产品在计算机上运行时,使得所述计算机执行如权利要求1-6任一项所述方法的步骤。10.一种电子设备,其特征在于,包括:至少一个处理器,以及与所述至少一个处理器通信连接的存储器,其中,所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行权利要求1-6中任一项所述方法的步骤。11.一种移动工具,其特征在于,包括权利要求10所述的电子设备。
技术总结
本发明公开一种障碍物SLT风险场环境建模方法、装置及相关产品,方法包括:以自车位置为原点在frenet坐标系中建立当前帧SLT空间坐标系,所述SLT空间坐标系中S轴以自车当前帧所在的当前车道为基准,各离散车道对应的当前帧ST栅格图按照预置排列顺序沿着L轴排列;根据当前帧障碍物的预测轨迹确定各障碍物分别在各离散车道对应的当前帧ST栅格图中的当前帧占据区域及当前帧占据区域中各栅格的当前帧占据概率,以得到当前帧障碍物的SLT空间风险场。本发明的环境建模方法,基于frenet坐标系建立障碍物三维SLT空间风险场,可供决策规划模块进行横纵向联合规划评价。进行横纵向联合规划评价。进行横纵向联合规划评价。
技术研发人员:徐宁 徐成 张放 张德兆 王肖 李晓飞 霍舒豪
受保护的技术使用者:北京智行者科技有限公司
技术研发日:2022.03.18
技术公布日:2022/6/28
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。