1.本发明属于特种机器人领域,具体地说是一种折叠与伸缩臂复合形式机器人。
背景技术:
2.随着机器人技术的飞速发展,许多场合的重型设备搬运工作由机器人完成。使用机器人具有高效、节省人力的明显优势。目前工业上的六轴机器人,最大负荷不超过2000kg,负载能力低。而某些液压或者液电混合动力的重载机器人,负载自重比低,体积大,运输大负载时会产生困难。
技术实现要素:
3.针对上述问题,本发明的目的在于提供一种折叠与伸缩臂复合形式机器人。
4.本发明的目的是通过以下技术方案来实现的:
5.一种折叠与伸缩臂复合形式机器人,包括底座、回转支承、基座、减速机、液压马达、下摆臂、伸缩臂、液压缸a、液压缸b、俯仰臂与蜗轮蜗杆减速机;
6.所述底座安装于待安装地面,所述回转支承包括内齿圈和外圈,所述外圈套设于所述内齿圈的外侧,所述内齿圈的内侧面上设有轮齿,所述内齿圈固定安装于所述底座上,所述基座固定安装于所述外圈上,所述减速机固定安装于所述基座上,所述减速机的输入端与所述液压马达的输出端连接,所述减速机的输出端连接有与所述内齿圈的轮齿啮合的齿轮;所述液压马达依次通过所述减速机与所述齿轮带动所述外圈和所述基座绕所述内齿圈转动;
7.所述下摆臂的一端与所述基座铰接,所述下摆臂的另一端与所述伸缩臂的末端连接,所述液压缸a安装于所述基座和所述下摆臂之间并驱动所述下摆臂做折叠运动,所述液压缸b安装于所述下摆臂和所述伸缩臂的末端之间并驱动所述伸缩臂做折叠运动;
8.所述俯仰臂的一端安装于所述伸缩臂的首部,所述蜗轮蜗杆减速机安装于所述俯仰臂的另一端,所述蜗轮蜗杆减速机的输出端与负载部分连接。
9.所述伸缩臂包括多个从内向外依次套接的分节臂,相互套接的两个所述分节臂之间通过液压缸连接,所述液压缸b和所述下摆臂分别与套设在最外层的所述分节臂的末端铰接,所述俯仰臂与设置在最内层的所述分节臂的头部固定连接。
10.所述俯仰臂的轴向中心线与所述伸缩臂的伸出方向相垂直。
11.本发明的优点与积极效果为:
12.本发明采用液压动力系统,满足了机器人大负载需求;机器人工作时,折叠臂和伸缩臂打开,具备大的工作范围;机器人运输存放时,折叠臂和伸缩臂收回,体积小巧,机器人负载自重比大;机器人末端由蜗轮蜗杆减速机连接负载部分,传递旋转动力,负载大且具有自锁能力。
附图说明
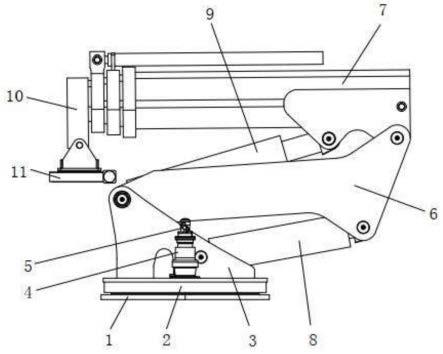
13.图1为本发明的整体结构示意图;
14.图2为本发明的基座、回转支承、减速机与液压马达之间的设置结构示意图;
15.图3为本发明的伸缩臂的俯视图;
16.图4为本发明的伸缩臂的内部结构示意图。
17.图中:1-底座、2-回转支承、201-内齿圈、2011-轮齿、202-外圈、3-基座、4-减速机、5-液压马达、6-下摆臂、7-伸缩臂、701-一节臂、702-二节臂、703-三节臂、704-四节臂、705-液压缸c、706-液压缸d、707-液压缸e、8-液压缸a、9-液压缸b、10-俯仰臂、11-蜗轮蜗杆减速机、12-齿轮。
具体实施方式
18.下面结合附图1-4对本发明作进一步详述。
19.一种折叠与伸缩臂复合形式机器人,如图1所示,包括底座1、回转支承2、基座3、减速机4、液压马达5、下摆臂6、伸缩臂7、液压缸a 8、液压缸b 9、俯仰臂10与蜗轮蜗杆减速机11,本实施例中回转支承2、减速机4、液压马达5、液压缸a 8与液压缸b 9均为市购产品。
20.如图2所示,底座1安装于待安装地面,回转支承2包括内齿圈201和外圈202,外圈202套设于内齿圈201的外侧,内齿圈201的内侧面上设有轮齿2011,内齿圈201固定安装于底座1上,基座3固定安装于外圈202上,减速机4固定安装于基座3上,减速机4的输入端与液压马达5的输出端连接,减速机4的输出端连接有与内齿圈201的轮齿2011啮合的齿轮12;液压马达5依次通过减速机4与齿轮12带动外圈202和基座3绕内齿圈201转动;
21.下摆臂6的一端与基座3铰接,下摆臂6的另一端与伸缩臂7的末端连接,液压缸a 8安装于基座3和下摆臂6之间并驱动下摆臂6做折叠运动,液压缸b 9安装于下摆臂6和伸缩臂7的末端之间并驱动伸缩臂7做折叠运动;
22.俯仰臂10的一端安装于伸缩臂7的首部,蜗轮蜗杆减速机11安装于俯仰臂10的另一端,本实施例中俯仰臂10的轴向中心线与伸缩臂7的伸出方向相垂直,蜗轮蜗杆减速机11的输出端与负载部分连接,本实施例中蜗轮蜗杆减速机11通过安装在输出端的法兰与负载部分连接。
23.伸缩臂7包括多个从内向外依次套接的分节臂,相互套接的两个分节臂之间通过液压缸连接,液压缸b 9和下摆臂6分别与套设在最外层的分节臂的末端铰接,俯仰臂10与设置在最内层的分节臂的头部固定连接。
24.具体而言,本实施例中,如图3和图4所示,伸缩臂7包括从内向外依次套接的一节臂701、二节臂702、三节臂703、四节臂704、液压缸c 705、液压缸d 706与液压缸e 707;液压缸b 9和下摆臂6分别与套设在最外层的一节臂701的末端铰接,液压缸b 9驱动一节臂701做折叠运动,俯仰臂10与设置在最内层的分节臂的头部固定连接;液压缸c 705的活塞杆与一节臂701固定连接,液压缸c 705的缸筒与二节臂702固定连接,液压缸c 705驱动二节臂702伸缩;液压缸d 706的缸筒与二节臂702固定连接,液压缸d 706的活塞杆与三节臂703固定连接,液压缸d 706驱动三节臂703伸缩;液压缸e 707的活塞杆与三节臂703固定连接,液压缸e 707的缸筒与四节臂704固定连接,液压缸e 707驱动四节臂704伸缩。本实施例中液压马达、液压缸a 8、液压缸b 9、液压缸c 705、液压缸d 706与液压缸e 707均与外接液压站
连接,并由外部电控柜中的控制系统控制,连接设置方式均为现有技术。
25.工作原理:
26.基座3通过回转支承2设置在底座1上,液压马达5依次通过减速机4与齿轮12带动外圈202和基座3绕内齿圈201转动,整个机器人实现回转运动。基座3上可装设编码器,精确控制机器人旋转角度。机器人的下摆臂6和伸缩臂7可折叠伸缩,并由液压缸驱动,可调整机器人工作范围及姿态。机器人7伸缩臂由液压缸驱动,满足大负载需求,同时大大增加了工作范围。工作时,各处液压缸伸出,机器人展开;运输存放机器人时,液压缸收回,机器人缩回。机器人各处旋转轴与伸缩轴可装设编码器,保证工作精度。机器人末端采用蜗轮蜗杆减速机11连接负载部分,传递旋转动力,具有大负载及自锁能力。
技术特征:
1.一种折叠与伸缩臂复合形式机器人,其特征在于:包括底座(1)、回转支承(2)、基座(3)、减速机(4)、液压马达(5)、下摆臂(6)、伸缩臂(7)、液压缸a(8)、液压缸b(9)、俯仰臂(10)与蜗轮蜗杆减速机(11);所述底座(1)安装于待安装地面,所述回转支承(2)包括内齿圈(201)和外圈(202),所述外圈(202)套设于所述内齿圈(201)的外侧,所述内齿圈(201)的内侧面上设有轮齿(2011),所述内齿圈(201)固定安装于所述底座(1)上,所述基座(3)固定安装于所述外圈(202)上,所述减速机(4)固定安装于所述基座(3)上,所述减速机(4)的输入端与所述液压马达(5)的输出端连接,所述减速机(4)的输出端连接有与所述内齿圈(201)的轮齿(2011)啮合的齿轮(12);所述液压马达(5)依次通过所述减速机(4)与所述齿轮(12)带动所述外圈(202)和所述基座(3)绕所述内齿圈(201)转动;所述下摆臂(6)的一端与所述基座(3)铰接,所述下摆臂(6)的另一端与所述伸缩臂(7)的末端连接,所述液压缸a(8)安装于所述基座(3)和所述下摆臂(6)之间并驱动所述下摆臂(6)做折叠运动,所述液压缸b(9)安装于所述下摆臂(6)和所述伸缩臂(7)的末端之间并驱动所述伸缩臂(7)做折叠运动;所述俯仰臂(10)的一端安装于所述伸缩臂(7)的首部,所述蜗轮蜗杆减速机(11)安装于所述俯仰臂(10)的另一端,所述蜗轮蜗杆减速机(11)的输出端与负载部分连接。2.根据权利要求1所述的折叠与伸缩臂复合形式机器人,其特征在于:所述伸缩臂(7)包括多个从内向外依次套接的分节臂,相互套接的两个所述分节臂之间通过液压缸连接,所述液压缸b(9)和所述下摆臂(6)分别与套设在最外层的所述分节臂的末端铰接,所述俯仰臂(10)与设置在最内层的所述分节臂的头部固定连接。3.根据权利要求1所述的折叠与伸缩臂复合形式机器人,其特征在于:所述俯仰臂(10)的轴向中心线与所述伸缩臂(7)的伸出方向相垂直。
技术总结
本发明属于特种机器人领域,具体地说是一种折叠与伸缩臂复合形式机器人,包括底座、回转支承、基座、减速机、液压马达、下摆臂、伸缩臂、液压缸、俯仰臂与蜗轮蜗杆减速机。基座通过回转支承设置在底座上,液压马达驱动基座转动,整个机器人实现回转运动。机器人的下摆臂和伸缩臂可折叠伸缩,并由液压缸驱动,可调整机器人工作范围及姿态。机器人伸缩臂由液压缸驱动,满足大负载需求,同时大大增加了工作范围。工作时,各处液压缸伸出,机器人展开;运输存放机器人时,液压缸收回,机器人缩回。机器人末端采用蜗轮蜗杆减速机连接负载部分,传递旋转动力,具有大负载及自锁能力。具有大负载及自锁能力。具有大负载及自锁能力。
技术研发人员:李庆杰 高世卿 宋海东 谢冰 李瑞强 赵亚川 贾连超 时鑫 宋国利 湛明宇 李志鹏
受保护的技术使用者:沈阳新松机器人自动化股份有限公司
技术研发日:2020.12.24
技术公布日:2022/6/28
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
