1.本发明涉及害虫防控技术领域,尤其涉及一种基于无人机高光谱成像的红火蚁巢识别方法。
背景技术:
2.红火蚁是源自南美洲的主要农业和医学害虫,是近几年入侵中国的物种。红火蚁食性复杂、习性凶猛、繁殖迅速、竞争力强,对入侵区域的人类健康、公共安全、农林业生产和生态环境均具有严重的危险性,应及时对其采取防控措施。因此,对红火蚁巢实行快速检测具有重要意义。
3.目前,在野外鉴别红火蚁巢的方法一般是采用肉眼观察的方法,先比较目标土堆与周围普通土壤的颜色、形状,再用硬物对目标土堆进行干扰,然后根据红火蚁巢特征及红火蚁主动攻击入侵者的行为进行判断的。若通过该方法来进行红火蚁疫情调查,将耗时耗力。
技术实现要素:
4.本发明的技术问题是提供一种基于无人机高光谱成像的红火蚁巢识别方法,能够对红火蚁巢进行远距离、非接触式自动判别。
5.为实现上述目的,本发明采取的技术方案为:
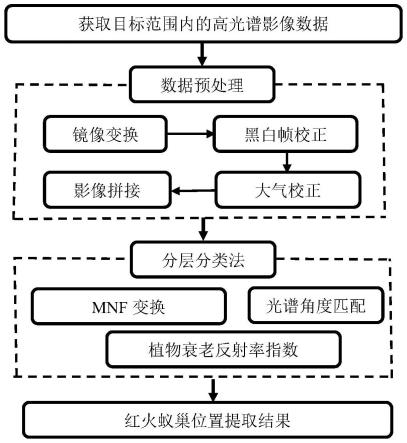
6.基于无人机高光谱成像的红火蚁巢识别方法,包括以下步骤:s1获取目标范围内的高光谱影像数据;s2对高光谱影像数据进行预处理得到中间数据集; s3通过分层分类法从中间数据集中提取红火蚁巢的目标位置。
7.进一步地,s3为:通过分层分类法在中间数据上提取湿蚁巢土、干蚁巢土、正常土壤、植被、树干的光谱进行分析,提取目标位置。
8.进一步地,分层分类法的因子包括:mnf变换、植物衰老反射率指数和光谱角度匹配法。
9.进一步地,s3包括:s31对中间数据集进行mnf变换处理得到第二中间数据集;s32从第二中间数据集中选择目标成分,并基于目标成分和植物衰老反射率指数和光谱角度对第二中间数据集中的数据进行判断,获取目标位置。
10.进一步地,s32包括:s321判断目标成分是否大于预设值,若是,进入s322 进行计算;若否,置为空值,不参与下一步计算;s322判断符合s321的数据的光谱角度是否小于或等于预设角度,若是,进入s323进行计算;若否,置为空值,不参与下一步计算;s323判断符合s323的条件的数据的植物衰老反射率指数是否大于预设指数,若是,进行标定;若否,将判断结果置为空值;s324 循环执行s322和s323,直至遍历满足s321的第二中间数据集中的数据,得到目标位置。
11.进一步地,预处理包括:镜像变换、黑白帧校正、大气校正和影像拼接。
附图说明
12.通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明及其特征、外形和优点将会变得更加明显。在全部附图中相同的标记指示相同的部分。并未刻意按照比例绘制附图,重点在于示出本发明的主旨。
13.图1是本发明提供的基于无人机高光谱成像的红火蚁巢识别方法的示意图;
14.图2是本发明提供的红火蚁巢土与其周边地物的光谱反射率曲线图。
具体实施方式
15.下面结合附图和具体的实施例对本发明作进一步的说明,但是不作为本发明的限定。
16.随着全球化的不断深化,各种交通运输工具不断改善,运输能力得到极大的提高,以及互联网的进一步普及,整个世界愈来愈成为一个紧密的整体,资本全球化、生产全球化、贸易全球化、信息全球化等等是当今世界的主旋律。而这向上向好的时代背景之后,也为物种的入侵建筑起了庞大的桥梁,使物种的活动范围不不再局限于一隅,而是顺势向世界扩散、蔓延,外来物种的入侵,众所周知当地原本平衡是生态系统造成极大的冲击,严重时会造成生态灾难。但这次红火蚁的入侵也是典型的外来物种入侵案例,不仅给我们的生态造成严重危害,还给人们的生命健康安全造成威胁。
17.针对红火蚁的入侵问题,本发明采用大疆六旋翼无人机m600 pro,无人机 净重约4kg,最大载重约10kg,在无人机m600pro平台上搭载四川双利合谱 科技有限公司的高光谱成像仪gaiasky-mini2,采用无人机悬停于空中,运用高 光谱成像光谱仪内置推扫的功能获取目标地面的高光谱影像数据,本实施例中, 高光谱影像数据采集时间为2021年10月9日中午11点30分,天气为晴,无 人机的飞行高度为30m,高光谱成像仪的曝光时间为1.13ms,增益为1,高光 谱影像数据的空间分辨率为0.02m,图像分辨率为696*736,波段数为256个。
18.接着在specview软件中对获得的高光谱影像数据进行预处理,包括镜像变换、黑白帧校准、大气校正和影像拼接。其中,镜像变换是为了修正因内置推扫而导致的影像内部畸变对拼接的影响;黑白帧校正的目的是为了将dn值(数字量化之,digital quantization value)转化为反射率值(reflectance)。具体如公式1:
[0019][0020]
式中,r
ref
是黑白校正过的图像的反射率值,dn
raw
是原始图像的dn值,dn
white
为参考板的白帧数据,dn
dark
是相机的系统误差dn值,r
white
为参考板的反射率系数。
[0021]
考虑到无人机飞到一定高度后,高光谱成像仪获取的高光谱影像数据可能会受到大气、水汽等因素的影响。为了消除这些因素的影响,在无人机起飞之前,在拍摄区域放置一块经过国家计量院标定过的2m*2m灰布,在高光谱影像获取的时候,只需要在其中的一景高光谱影像中覆盖到灰布即可实现大气校正。
[0022]
消除大气、水汽等因素影响的方法如公式2所示。
[0023]
[0024]
式中,r
fixed
是消除大气、水汽等因素后的图像光谱反射率,r
ref
是经过黑白校正后的图像反射率,r
standard
是经过国家计量院标定的灰布的光谱反射率,r
grayref
是经过黑白校正后图像中灰布的光谱反射率。
[0025]
接着再利用江苏双利合谱科技有限公司研发的specstitcher软件对经过大气校正的无人机高光谱影像数据进行拼接得到中间数据集。
[0026]
在已拼接的高光谱影像上选择典型地物的光谱进行分析,如图2所示。从图中可知,湿、干红火蚁蚁巢土与普通土壤的反射图波形相似,在近红外范围内湿、干蚁巢土的光谱反射率高于普通土壤反射率,其中湿蚁巢土的光谱反射率高于干蚁巢土的光谱反射率。蚁巢土和普通土壤与植被、树干等其他地物的光谱反射率曲线有较大的区别,其中树干在400~1000nm范围内的光谱反射率值低于蚁巢土和普通土壤,植被在可见光范围内有明显的“峰”和“谷”,在 700~1000nm的范围内,有明显的“边”。
[0027]
针对已拼接的无人机高光谱影像数据,利用mnf变换(最小噪声分离 minimum noise fraction rotation,mnf rotation)、光谱角匹配法、植物衰老反射率指数(plant senscence reflectance index,psri)等构建分层分类法高效提取无人机高光谱影像中的红火蚁巢的位置信息,具体如图1所示,对中间数据集进行mnf变换处理得到第二中间数据集;从第二中间数据集中选择目标成分,并基于目标成分和植物衰老反射率指数和光谱角度对第二中间数据集中的数据进行判断,获取目标位置。具体为判断目标成分是否大于预设值,若是,进行光谱角度计算;若否,置为空值,不参与下一步计算;判断目标成分符合要求的数据的光谱角度是否小于或等于预设角度,若是,进行植物衰老反射率指数计算;若否,置为空值,不参与下一步计算;判断目标成分、光谱角度均符合要求的数据的植物衰老反射率指数是否大于预设指数,若是,进行标定;若否,将判断结果置为空值;找出满足目标成分要求、光谱角度和植物衰老反射率指数的图像位置即可判断为红火蚁巢位置。
[0028]
在本实施例中,mnf rotation选择第五成分mnf大于5作为判断条件,当 mnf5大于5时,进入下一步计算,小于等于5时,作为空值不参与下一步计算;光谱角匹配法选择蚁巢土壤光谱的最大角度为0.13作为判断条件,光谱角度小于等于0.13时进入下一步计算,大于0.13时作为空值不参与下一步计算;植物衰老反射率指数选择大于0.2作为判断条件,当植物衰老反射率指数大于0.2 时,进入下一步计算,当植物衰老反射率指数小于等于0.2时,作为空值不参与下一步计算,综合满足第五成分mnf大于5、光谱角度小于等于0.13和植物衰老反射率指数大于0.2的图像位置即可判断为红火蚁巢位置。
[0029]
综上所述,本发明提出基于无人机高光谱成像的红火蚁巢识别方法,实现远距离判别红火蚁蚁巢的空间分布情况,使红火蚁灾情监测更加快捷、高效,且操作简单,时效性强,可节省大量人力、物力的投入。
[0030]
以上对本发明的较佳实施例进行了描述;需要理解的是,本发明并不局限于上述特定实施方式,其中未尽详细描述的设备和结构应该理解为用本领域中的普通方式予以实施;任何熟悉本领域的技术人员,在不脱离本发明技术方案作出许多可能的变动和修饰,或修改为等同变化的等效实施例,这并不影响本发明的实质内容;因此,凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所做的任何简单修改、等同变化及修饰,均仍属于本发明技术方案保护的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。