1.本技术属于航空飞行器技术领域,具体涉及一种滚仰式导引头及陀螺仪数据融合方法。
背景技术:
2.导引头安装在制导武器头部,测量目标相对于制导武器的运动参数并产生制导信息的装置,作为巡飞弹的核心部件,为巡飞弹提供自主侦查、识别、跟踪服务,并提供制导所需要的视线角速度等信息,其性能直接决定了导弹的侦查效果、打击精度、毁伤效果等。
3.导引头根据其滚转方式不同分为偏仰式导引头和滚仰式导引头,与偏仰式导引头相比,滚仰式导引头具有较大的离轴角和视场角范围。
4.滚仰式导引头主要构成包括框架结构、伺服电机、陀螺仪、角度传感器、图像探测器、控制器。陀螺仪是其中重要的惯性器件,可作为姿态传感器检测载体的姿态变化,通过陀螺传感器获得的信息作为速度环的反馈可实现导引头平台的自稳定控制。
5.在实际飞行中,由于导引头平台框架自身转动的影响,导致视轴发生改变,在陀螺仪数据的使用过程中会考虑这些影响因素,会对其进行坐标转换,将这些物理量转换到同一坐标系内进行表示。
6.通常坐标系变换涉及矩阵运算,计算相对比较大,同时此方法在框架角0
°
附近时,滚仰式导引头因其结构特性,俯仰框与探测器视轴在同一方向,tan(0
°
)为0,1/tan(0
°
)为无穷大,出现奇异值现象,导致目标微小动作或俯仰框架角微小变动会导致导引头大幅度滚转。
7.针对上述问题,目前比较常用的解决方法是导引头俯仰框架角在0
°
附近时,在视线信息提取算法中将滚转框角速度信息保持上一时刻的值不变,但此方法会降低系统性能,同时,在低成本巡飞弹导引头中,为降低成本,会采用精度较低的位置传感器,导致测得的位置角精度较差,会导致解算出来的角速率存在较大误差。
8.因此,设计一种精度高、方法简单、易于工程实现新的滚仰式导引头,探索一种新的陀螺仪数据融合方法成为目前导引头技术领域亟待解决的技术问题。
技术实现要素:
9.本技术的目的是提供一种滚仰式导引头,解决了目前现有传统导引头的陀螺仪模块集成度低,体积大,成本高的问题。
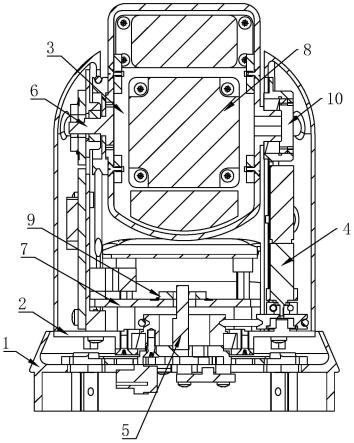
10.为解决上述问题,本技术所采用的技术方案是:一种滚仰式导引头,包括基座、滚转框架、相机模组、伺服驱动机构,控制器,基座与滚转框架之间设置滚转轴,滚转框架通过滚转轴安装在基座上,相机模组与滚转框架之间设置俯仰转轴,相机模组通过俯仰转轴安装在滚转框架上,滚转框架上设置滚转陀螺仪模块,相机模组内设置俯仰陀螺仪模块。
11.所述俯仰滚转陀螺仪模块包括多片陀螺仪和电路板,所述多片陀螺仪以其中一片
陀螺仪为基准,依次旋转90
°
后焊接在电路板上。
12.所述的滚转陀螺仪模块包括至少一片陀螺仪。
13.所述滚转轴上设置滚转轴位置传感器,所述俯仰转轴上设置俯仰转轴位置传感器,滚转轴位置传感器和俯仰转轴位置传感器采用ad采集芯片,用于读取位置信息,实现滚转和俯仰角度测量。
14.另外,本技术还提供了一种滚仰式导引头的陀螺仪数据融合方法,其方法如下:定义导引头的框架坐标系osx
syszs
、导引头的视线坐标系o
l
x
lylzl
、陀螺仪的坐标系oxyz,俯仰陀螺仪模块放置于成像模组上,与导引头的视线坐标系重合;在控制器中设置读取周期,定时完成俯仰陀螺仪模块上多片陀螺仪三轴数据的读取,滚转陀螺仪模块的xs轴数据读取;根据导引头视线坐标系的定义,重新定义x
l
轴、y
l
轴、z
l
轴数据集,分别采集x
l
轴、y
l
轴、z
l
轴三轴数据,将采集到的多组数据分别整理到对应的x
l
轴、y
l
轴、z
l
轴数据集合中;对x
l
轴、y
l
轴、z
l
轴三个轴的数据集进行处理,剔除异常值后进行处理,得到x
l
轴、y
l
轴、z
l
三个轴的角速率,处理得到的三轴数据为导引头视线坐标系三轴角速率值;为实现导引头视轴的稳定控制,需要对框架进行闭环控制,需要知道滚转和俯仰框架的角速率,因为陀螺仪布置在俯仰轴上,测得的角速率是在视线坐标系下测得,不能反映滚转和俯仰框架的真实角速率,为此需要将导引头的视线坐标系转换到导引头的框架坐标系,需要先绕xs轴旋转,然后绕zs轴旋转;根据导引头的视线坐标系与框架坐标系的俯仰轴为同一个结构框架,导引头的视线坐标系与框架坐标系的z轴重合,得到框架坐标系的zs轴的角速率即为z
l
轴的角速率,将导引头的视线坐标系和框架坐标系三轴坐标系简化为两轴坐标系;定义θ为坐标系x
l
与xs轴的旋转角,ω
sx
为框架x轴向旋转角速率,ω
lx
为视线坐标系x轴向旋转角速率,ω
ly
为视线坐标系y轴向旋转角速率,根据转换后的简化坐标系可以直接得到稳定控制所需的滚转角速度ω
x
:(ω
x
)2=(ω
lx
)2 (ω
ly
)2稳定控制所需的俯仰角速度:ωz=-ω
lz
,解算得到|ω
x
|为导引头框架角速率的绝对值,并对符号进行判断;根据得到的xs轴、ys轴角速率,对导引头进行速率闭环,实现视轴速度环稳定控制。
15.申请的有益效果是:1.本技术一种滚仰式导引头的俯仰陀螺仪模块由多片低成本陀螺仪组成,滚转陀螺仪模块采用一片低成本陀螺仪,代替了目前使用的高成本的陀螺仪,螺仪模块在结构布局上进行优化设计,在导引头的俯仰陀螺仪模块上采用了多片低成本陀螺仪组合的结构设计,能够达到甚至优于目前所目前所使用的高成本陀螺仪所能达到的技术效果,具有集成度高、尺寸小、成本低特点。
16.2.本技术针对滚仰式导引头的螺仪模块结构上改进,特别设计滚仰式导引头的陀螺仪数据融合方法,在对三轴数据处理上引入容错设计,剔除异常数据后对剩余数据进行融合处理,相比于传统的单个陀螺仪,可有效剔除异常值,容错能力也大幅提高,同时数据精度也大幅提升。
17.3.本技术滚仰式导引头的陀螺仪数据融合方法中,对滚转及俯仰方向角速率提取
时,由于导引头的视线坐标系与框架坐标系的俯仰轴为同一个结构框架,导引头的视线坐标系与框架坐标系的z轴重合,得到框架坐标系的zs轴的角速率即为z
l
轴的角速率,将导引头的视线坐标系和框架坐标系三轴坐标系简化为两轴坐标系。采用该简化坐标系变换方法,不引入俯仰角度,不涉及正余弦计算,可以较好的避免传统方法计算出现的奇异值问题。同时,解算不涉及俯仰角度,可以进一步提高角速率的提取精度和准确度。
附图说明
18.图1是本技术一种滚仰式导引头的结构示意图;图2是本发明的导引头的视线坐标系与导引头的框架坐标系关系图;图3是本发明的简化之后导引头的视线坐标系与导引头的框架坐标系关系图;图4是本技术的俯仰陀螺仪模块布局示意图;图5是本技术的陀螺仪坐标系布局示意图;图6是本技术采用的融合方法得到滚转角速率与直接测量值的对比图;图7是图6的局部放大图。
19.附图标记说明:图中:1、基座;2、滚转框架;3、相机模组;4、伺服驱动机构;5、滚转轴;6、俯仰转轴;7、滚转陀螺仪模块;8、俯仰陀螺仪模块;9、滚转轴位置传感器;10、俯仰转轴位置传感器。
具体实施方式
20.为能清楚说明本方案的技术特点,下面通过具体实施方式,并结合其附图,对本方案进行阐述。
21.在本技术的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本技术中的具体含义。
22.如图1所示,本技术公开了一种滚仰式导引头,包括基座1、滚转框架2、相机模组3、伺服驱动机构4、控制器,伺服驱动机构4作为动力和驱动机构分别用于驱动滚转框架2的轴向滚转以及相机模组3的俯仰滚转运动。
23.在基座1与滚转框架2之间设置滚转轴5,滚转框架2通过滚转轴5安装在基座1上,在伺服驱动机构的驱动下,滚转框架2可绕滚转轴5在基座1上发生轴向转动。相机模组3通过俯仰转轴6安装在滚转框架2上,相机模组3在伺服驱动机构4驱动下可沿俯仰转轴6进行俯仰转动。
24.在滚转框架2上设置滚转陀螺仪模块7,滚转陀螺仪模块7由一片陀螺仪组成,该片陀螺仪焊接在电路板上,并安装在滚装框架2上。
25.在相机模组3内设置俯仰陀螺仪模块8,俯仰滚转陀螺仪模块8包括四片陀螺仪和用于安装四片陀螺仪的电路板,四片陀螺仪以其中一片陀螺仪为基准,依次旋转90
°
后分别对应焊接在电路板上。
26.在滚转轴6上设置滚转轴位置传感器9,俯仰转轴7上设置俯仰转轴位置传感器10,
伺服稳定控制所需的俯仰角速度:ωz=-ω
lz
避免了传统提取方法需要使用θ角度的弊端,同时也避免产生奇异值的问题。
37.解算得到|ω
x
|为高精度的导引头框架角速率的绝对值,进行符号判断。根据滚转陀螺仪模块得到的ω
*sx
,精度虽然低,但可以根据ω
*sx
得到导引头框架角速率方向,进而得到高精度的框架角速率。
38.根据得到的xs轴、ys轴角速率,对导引头进行速率闭环,实现视线速度环稳定控制。
39.其中,zs角速率是俯仰轴的角速率值,可以从陀螺仪直接测量得到,不需要进行解耦或融合。
40.结合图6、图7所示,本技术所采用的陀螺仪数据融合方法相对于传统的方法得到的框架角速率精度得到大幅提升,有效避免了奇异值问题,且性能稳定、容错性好、成本低。
41.采用传统坐标变换需进行矩阵计算,且用到俯仰框架角度,在低成本巡飞弹导引头中,位置传感器精度较低,会增大速率提取误差,降低控制精度。具体传统方法为:坐标系变换:导引头框架坐标系osx
syszs
向导引头视线坐标系o
l
x
lylzl
变换。根据导引头框架坐标系和导引头视线坐标系的定义,由导引头框架坐标系osx
syszs
先绕x轴旋转,在绕z轴旋转。
42.θ
x
为滚转旋转角度,θz为俯仰旋转角度,设ω
sx
,ω
sy
,ω
sz
为框架角速度沿三个坐标轴的分量,设
43.导引头框架坐标系osx
syszs
先绕x轴旋转的旋转矩阵为rx,在绕z轴旋转的旋转矩阵为rz,得到视线轴坐标系,坐标系变换关系如下:其中,ω
x
、ωz为滚转、俯仰产生的角速率;为滚转、俯仰产生的角速率;θ
x
、θz为滚转与俯仰的旋转角度;为滚转与俯仰的旋转角度;ω
x
、ωz为滚转、俯仰角速率。
44.在理想情况下,实现导引头视轴稳定,需要x、z轴感受到的扰动速率为零即:
即:即有:ω
x
、ωz即为伺服控制所需要的滚转、俯仰角速率。
45.但在θz为90度时,存在奇异值问题,因为sec (π/2)为无穷大,会导致目标微小动作或俯仰框架角微小变动会导致导引头大幅度滚转。
46.以上所述只是本技术的优选实施方式,对于本技术领域的普通技术人员来说,在不脱离本技术原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也被视为本技术的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。