技术特征:
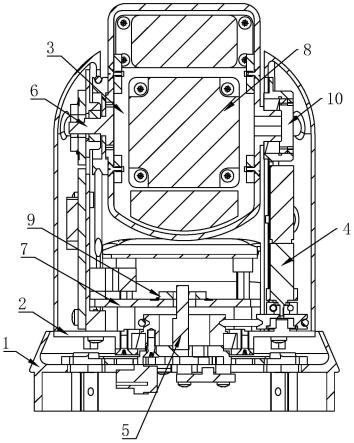
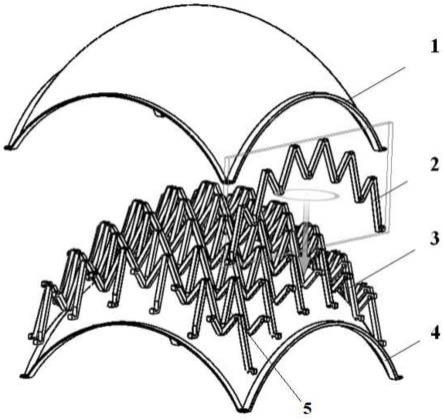
1.一种滚仰式导引头,包括基座、滚转框架、相机模组、伺服驱动机构、控制器,基座与滚转框架之间设置滚转轴,滚转框架通过滚转轴安装在基座上,相机模组与滚转框架之间设置俯仰转轴,相机模组通过俯仰转轴安装在滚转框架上,其特征在于,滚转框架上设置滚转陀螺仪模块,相机模组内设置俯仰陀螺仪模块。2.根据权利要求1所述的一种滚仰式导引头,其特征在于,所述俯仰滚转陀螺仪模块包括多片陀螺仪和电路板,所述多片陀螺仪以其中一片陀螺仪为基准,依次旋转90
°
后焊接在电路板上。3.根据权利要求1所述的一种滚仰式导引头,其特征在于,所述的滚转陀螺仪模块包括至少一片陀螺仪。4.根据权利要求1所述的一种滚仰式导引头,其特征在于,所述滚转轴上设置滚转轴位置传感器,所述俯仰转轴上设置俯仰转轴位置传感器,滚转轴位置传感器和俯仰转轴位置传感器电连接于控制器。5.一种滚仰式导引头的陀螺仪数据融合方法,其特征在于,所述数据融合方法如下:定义导引头的框架坐标系o
s
x
s
y
s
z
s
、导引头的视线坐标系o
l
x
l
y
l
z
l
、陀螺仪的坐标系oxyz,俯仰陀螺仪模块放置于相机模组上,与导引头的视线坐标系重合;在控制器中设置读取周期,定时完成俯仰陀螺仪模块上多片陀螺仪三轴数据的读取,滚转陀螺仪模块的x
s
轴数据读取;根据导引头视线坐标系的定义,重新定义x
l
轴、y
l
轴、z
l
轴数据集,分别采集x
l
轴、y
l
轴、z
l
轴三个轴数据,将采集到的数据分别整理到对应的x
l
轴、y
l
轴、z
l
轴数据集合中;对x
l
轴、y
l
轴、z
l
轴三个轴的数据集进行处理,剔除异常值后进行处理,得到x
l
轴、y
l
轴、z
l
三个轴的角速率,处理得到的三轴数据为导引头视线坐标系三轴角速率值;将导引头的视线坐标系转换到导引头的框架坐标系,需要先绕x
s
轴旋转,然后绕z
s
轴旋转;根据导引头的视线坐标系与框架坐标系的俯仰轴为同一个结构框架,导引头的视线坐标系与框架坐标系的z轴重合,得到框架坐标系的z
s
轴的角速率即为z
l
轴的角速率,将导引头的视线坐标系和框架坐标系三轴坐标系简化为两轴坐标系;定义θ为坐标系x
l
与x
s
轴的旋转角,ω
sx
为框架x轴向旋转角速率,ω
lx
为视线坐标系x轴向旋转角速率,ω
ly
为视线坐标系y轴向旋转角速率,根据转换后的简化坐标系可以直接得到稳定控制所需的滚转角速度ω
x
:(ω
x
)2=(ω
lx
)2 (ω
ly
)2稳定控制所需的俯仰角速度:ω
z
=-ω
lz
,解算得到|ω
x
|为导引头框架角速率的绝对值,并对符号进行判断;根据得到的x
s
轴、y
s
轴角速率,对导引头进行速率闭环,实现视轴速度环稳定控制。
技术总结
本申请公开了一种滚仰式导引头,包括基座、滚转框架、相机模组、伺服驱动机构、控制器,基座与滚转框架之间设置滚转轴,滚转框架通过滚转轴安装在基座上,相机模组与滚转框架之间设置俯仰转轴,相机模组通过俯仰转轴安装在滚转框架上,其特征在于,滚转框架上设置滚转陀螺仪模块,相机模组内设置俯仰陀螺仪模块。本申请还公开了滚仰式导引头的陀螺仪数据融合方法,采用了简化坐标系变换方法,不引入俯仰角度,不涉及正余弦计算,可以较好的避免传统方法计算出现的奇异值问题。同时,解算不涉及俯仰角度,可以进一步提高角速率的提取精度和准确度。本申请一种滚仰式导引头所应用的陀螺仪模块具有集成度高、尺寸小、成本低特点。成本低特点。成本低特点。
技术研发人员:周满 张弛 杨海 孙宝林 唐国帅 胡亮亮 高子益 龚雨阳
受保护的技术使用者:中天长光(青岛)装备科技有限公司
技术研发日:2022.01.27
技术公布日:2022/6/28
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。