1.本公开属于医疗设备技术领域,尤其涉及一种双镜头同步调焦的三维图像适配器及内窥镜系统。
背景技术:
2.目前的医疗内窥镜成像系统中,采集的图像主要为二维图像,可以称为传统2d(二维)内窥镜系统,而在一些对手术精确性要求较高的方案中,二维图像在图像的深度上信息不足,难以满足要求。但是三维图像可以很好地满足相关的要求,这种图像系统可以称为3d(三维)内窥镜系统。在3d内窥镜系统里,医生可以通过裸眼3d显示器或者佩戴其他辅助显示设备观看到3d高清内窥镜的三维图像,患者人体内部被检测部位的感观更为立体、真实,增加了手术的精确性及安全性,或者随着人机交互的进步,外科手术机器人的远程诊断和远程治疗,在应用了3d内窥镜技术后,能有效提高手术机器人的操作精度、安全性以及可靠性。
3.随着技术的发展,医疗3d内窥镜也将得到快速发展,3d内窥成像相比传统2d内窥镜的图像更加真实,以最终取代现有的常规的2d内窥镜。目前市场上3d内窥镜系统一般是由摄像机里的两个光感传感器去接收内窥镜里的两路参数相同的光学系统的图像,经图像处理系统处理后,呈现真实的三维效果。同常规的2d内窥镜的图像采集系统中的适配器一样,3d内窥镜系统的三维图像适配器的作用是使内窥镜前端的物镜的相清晰的投影在摄像机的光感传感器上,实现清晰的投影,在三维图像适配器内设有两路光学镜头,在适配器制造过程中将两路光学镜头固定位置不动地使对焦恒定的方式,在特定物距范围内呈现清晰图像。
4.常规的2d内窥镜系统仅能获得二维图像,缺少深度维度,无法真实还原术中场景。3d内窥镜系统可获得三维图像,其中作为图像采集系统的三维图像适配器,两路光学镜头固定不动的方式,图像的最佳观察的物距位于特定范围,却不能随被观察物体的远近位置做调节,难以获得最佳的图像清晰度。
技术实现要素:
5.为了解决上述技术问题中的至少一个,本公开提供了一种双镜头同步调焦的三维图像适配器及内窥镜系统。
6.根据本公开的一个方面,一种双镜头同步调焦的三维图像适配器,包括:
7.镜头部,所述镜头部包括第一组镜头和第二组镜头,所述第一组镜头和第二组镜头的位置被配置为相对固定,并且相对固定的所述第一组镜头和第二组镜头的成像参数被配置为一致;
8.调焦旋钮,所述调焦旋钮能够被用户控制以绕所述三维图像适配器的轴向进行转动,通过所述调焦旋钮的转动使得所述第一组镜头和所述第二组镜头同步移动;以及
9.传递部,所述传递部用于将所述调焦旋钮的转动运动转向为所述第一组镜头和第
二组镜头沿所述轴向的平移运动,
10.其中在调焦的过程中,用户转动所述调焦旋钮,通过所述传递部将所述调焦旋钮的转动运动转换为所述第一组镜头和第二组镜头的平移运动,这样所述第一组镜头和第二组镜头被同步移动以进行同步调焦来得到清晰的三维图像。
11.根据本公开的至少一个实施方式的双镜头同步调焦的三维图像适配器,还包括镜头连接块及平移导向块,所述第一组镜头和第二组镜头被相对固定在所述镜头连接块上,所述镜头连接块安装至所述平移导向块并且能够沿着所述平移导向块进行移动,从而带动所述第一组镜头和第二组镜头进行所述平移运动。
12.根据本公开的至少一个实施方式的双镜头同步调焦的三维图像适配器,所述传递部包括内齿轮和丝杠,
13.所述内齿轮的轮齿与所述调焦旋钮内侧所设置的轮齿啮合,以便当所述调焦旋钮被转动时,所述内齿轮进行转动,
14.所述丝杠设置有丝杠螺纹并且所述内齿轮设置有丝套螺纹,所述丝杠螺纹和所述丝套螺纹,以便将所述内齿轮的转动运动转向为所述丝杠的轴向运动,并且所述丝杠与所述镜头连接块固定,从而通过所述丝杠的平移运动带动所述镜头连接块以及所述第一组镜头和第二组镜头进行所述平移运动。
15.根据本公开的至少一个实施方式的双镜头同步调焦的三维图像适配器,还包括内齿轮固定部,所述内齿轮固定部固定至所述适配器的基体上,并且用于限制所述内齿轮沿所述轴向进行移动。
16.根据本公开的至少一个实施方式的双镜头同步调焦的三维图像适配器,通过调整所述内齿轮的轮齿与所述调焦旋钮的轮齿的模数、和/或通过调整所述丝杠的丝杠螺纹与所述内齿轮的丝套螺纹的螺距,来实现所述调焦旋钮的转动运动幅度与所述第一组镜头和第二组镜头的平移运动幅度的匹配。
17.根据本公开的至少一个实施方式的双镜头同步调焦的三维图像适配器,还包括第一镜筒和第二镜筒,所述第一镜筒与第二镜筒固定至所述适配器的基体或与所述基体一体成型,并且分别用于容纳第一组镜头和第二组镜头,
18.所述第一组镜头设置有第一平移定向件,所述第一镜筒设置有第一平移定向槽,所述第一平移定向件被限定在所述第一平移定向槽从而实现所述第一组镜头的平移定向;所述第二组镜头设置有第二平移定向件,所述第二镜筒设置有第二平移定向槽,所述第二平移定向件被限定在所述第二平移定向槽从而实现所述第二组镜头的平移定向。
19.根据本公开的至少一个实施方式的双镜头同步调焦的三维图像适配器,还包括弹性件,所述弹性件配置成消除所述第一组镜头和第二组镜头的同步移动过程中的轴向移动间隙。
20.根据本公开的至少一个实施方式的双镜头同步调焦的三维图像适配器,还包括密封件,所述密封件套设至所述适配器的基体并且密封在所述基体与摄像机座盖板之间。
21.根据本公开的至少一个实施方式的双镜头同步调焦的三维图像适配器,所述第一组镜头的光轴与第二组镜头的光轴被设置为平行且处于同一水平面中,并且所述第一组镜头的成像参数被标定后对所述第二组镜头进行成像参数标定,以使得所述第二组镜头的成像参数与第一组镜头的成像参数一致,成像参数一致的第一组镜头和第二组镜头被锁定以
实现二者位置的相对固定。
22.根据本公开的至少一个实施方式的双镜头同步调焦的三维图像适配器,还包括微调件,所述微调件用于对所述第二组镜头进行微调以使得所述第二组镜头的成像参数与第一组镜头的成像参数一致。
23.根据本公开的另一方面,一种内窥镜系统,包括:
24.内窥镜;
25.如上任一项所述的三维图像适配器,所述三维图像适配器通过内窥镜固定座与所述内窥镜固定连接;以及
26.摄像机,所述摄像机与所述三维图像适配器的摄像机固定座固定连接。
27.本公开的三维图像适配器,对双镜头分别进行了独立的校准后,达到最佳的图像效果,在将双镜头位置相对固定在一起,双镜头通过内部机构件连接到调焦旋钮上,在临床使用中,应用了本公开的双镜头同步调节机构的三维图像适配器,当被观察物体的远近变化时,临床医生等终端用户旋转调焦旋钮带动双镜头同时前后移动,可获得清晰的图像。解决了内窥镜系统不能随被观察物体远近变化而获得清晰图像的问题。能给操作者带来很好的使用体验,使术中的场景真实还原。本公开的有益效果,两组镜头通常使用两个调焦旋钮调节,本公开采用一个调焦旋钮,节约一个调焦旋钮的成本,明显的减小了产品整体尺寸,且一体的密封设计降低了密封风险。本公开的结构在市场上未有类似的方案,它同时兼顾到操作者操作体验、产品的尺寸、密封性能,随着3d内窥镜系统市场的不断扩大,本公开的创新优势会显现。
附图说明
28.附图示出了本公开的示例性实施方式,并与其说明一起用于解释本公开的原理,其中包括了这些附图以提供对本公开的进一步理解,并且附图包括在本说明书中并构成本说明书的一部分。
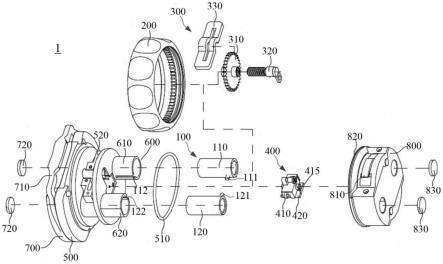
29.图1是根据本公开的双镜头同步调节机构的分解示意图。
30.图2是根据本公开的双镜头同步调节机构的工作示意图。
31.图3是根据本公开的三维图像适配器的分解示意图。
32.图4是根据本公开的内窥镜系统的分解示意图。
33.图5是根据本公开的三维图像适配器的操作示意图。
34.附图标记说明
35.1 三维图像适配器
36.2 内窥镜
37.3 摄像机
38.10 双镜头同步调节机构
39.100 镜头部
40.110 第一组镜头
41.111 第一平移定向件
42.112 第一平移定向槽
43.120 第二组镜头
44.121 第二平移定向件
45.122 第二平移定向槽
46.200 调焦旋钮
47.300 传递部
48.310 内齿轮
49.320 丝杠
50.330 内齿轮固定部
51.410 镜头连接块
52.415 连接块螺钉
53.420 平移导向块
54.500 基体
55.510 密封件
56.520 固定面
57.600 镜筒部
58.610 第一镜筒
59.620 第二镜筒
60.700 内窥镜固定座
61.710 内窥镜推板
62.720 透明窗
63.800 摄像机固定座
64.810 摄像机锁定销
65.820 摄像机座盖板
66.830 透明窗。
具体实施方式
67.下面结合附图和实施方式对本公开作进一步的详细说明。可以理解的是,此处所描述的具体实施方式仅用于解释相关内容,而非对本公开的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本公开相关的部分。
68.需要说明的是,在不冲突的情况下,本公开中的实施方式及实施方式中的特征可以相互组合。下面将参考附图并结合实施方式来详细说明本公开的技术方案。
69.除非另有说明,否则示出的示例性实施方式/实施例将被理解为提供可以在实践中实施本公开的技术构思的一些方式的各种细节的示例性特征。因此,除非另有说明,否则在不脱离本公开的技术构思的情况下,各种实施方式/实施例的特征可以另外地组合、分离、互换和/或重新布置。
70.在附图中使用交叉影线和/或阴影通常用于使相邻部件之间的边界变得清晰。如此,除非说明,否则交叉影线或阴影的存在与否均不传达或表示对部件的具体材料、材料性质、尺寸、比例、示出的部件之间的共性和/或部件的任何其它特性、属性、性质等的任何偏好或者要求。此外,在附图中,为了清楚和/或描述性的目的,可以夸大部件的尺寸和相对尺寸。当可以不同地实施示例性实施例时,可以以不同于所描述的顺序来执行具体的工艺顺
序。例如,可以基本同时执行或者以与所描述的顺序相反的顺序执行两个连续描述的工艺。此外,同样的附图标记表示同样的部件。
71.当一个部件被称作“在”另一部件“上”或“之上”、“连接到”或“结合到”另一部件时,该部件可以直接在所述另一部件上、直接连接到或直接结合到所述另一部件,或者可以存在中间部件。然而,当部件被称作“直接在”另一部件“上”、“直接连接到”或“直接结合到”另一部件时,不存在中间部件。为此,术语“连接”可以指物理连接、电气连接等,并且具有或不具有中间部件。
72.为了描述性目的,本公开可使用诸如“在
……
之下”、“在
……
下方”、“在
……
下”、“下”、“在
……
上方”、“上”、“在
……
之上”、“较高的”和“侧(例如,在“侧壁”中)”等的空间相对术语,从而来描述如附图中示出的一个部件与另一(其它)部件的关系。除了附图中描绘的方位之外,空间相对术语还意图包含设备在使用、操作和/或制造中的不同方位。例如,如果附图中的设备被翻转,则被描述为“在”其它部件或特征“下方”或“之下”的部件将随后被定位为“在”所述其它部件或特征“上方”。因此,示例性术语“在
……
下方”可以包含“上方”和“下方”两种方位。此外,设备可被另外定位(例如,旋转90度或者在其它方位处),如此,相应地解释这里使用的空间相对描述语。
73.这里使用的术语是为了描述具体实施例的目的,而不意图是限制性的。如这里所使用的,除非上下文另外清楚地指出,否则单数形式“一个(种、者)”和“所述(该)”也意图包括复数形式。此外,当在本说明书中使用术语“包含”和/或“包括”以及它们的变型时,说明存在所陈述的特征、整体、步骤、操作、部件、组件和/或它们的组,但不排除存在或附加一个或更多个其它特征、整体、步骤、操作、部件、组件和/或它们的组。还要注意的是,如这里使用的,术语“基本上”、“大约”和其它类似的术语被用作近似术语而不用作程度术语,如此,它们被用来解释本领域普通技术人员将认识到的测量值、计算值和/或提供的值的固有偏差。
74.根据本公开的一个实施方式,提供了一种双镜头同步调焦的三维图像适配器。图1示出了根据本公开的一个实施例的双镜头同步调焦的三维图像适配器的调节机构并且图2示出了根据本公开的一个实施例的双镜头同步调焦的三维图像适配器。如图1和图2所示,双镜头同步调节机构10可以包括镜头部100,镜头部100可以包括第一组镜头110和第二组镜头120。在本公开中,第一组镜头110和第二组镜头120的相对位置被配置为相对固定,并且在二者相对固定之前,二者的成像参数被调整/被配置为一致或相同。
75.第一组镜头110和第二组镜头120可以分别由多个光学透镜构成。第一组镜头110与第二组镜头120的光学设计的系统参数、参数结构等可以相同。第一组镜头110和第二组镜头120可以固定在镜头连接块410上。这样镜头连接块410可以作为镜头固定座。第一组镜头110和第二组镜头120可以水平并列地放置在镜头连接块410上来对同一观察对象进行成像。
76.在本公开中,可以将第一组镜头110和第二组镜头120中的一组镜头首先设置在镜头连接块410上,二者的设置没有顺序的要求。下面将以首先设置第一组镜头110为例进行说明。将第一组镜头110设置在镜头连接块410上,并且对第一组镜头110进行参数标定并且将第一组镜头110固定至镜头连接块410上。然后将第二组镜头120定位在镜头连接块410上。其中第二组镜头120可以设置成其光轴与第一组镜头110的光轴平行且处于同一水平面
中。在第二组镜头120定位在镜头连接块410之后,可以依照第一组镜头110的光学标定情况来对第二组镜头120进行调节。例如对于具有相同光学设计参数的第一组镜头110和第二组镜头120,由于其制造过程中会存在细微的光学差别,因此可以对第二组镜头120进行微调,例如在第二组镜头120定位在镜头连接块410之后可以通过微调部来调节第二组镜头120的前后位置,并且对第二组镜头120进行参数标定,直至第二组镜头120的成像参数与第一组镜头110的成像参数一致。之后可以通过诸如固定螺钉的连接块螺钉415将第二组镜头120固定至镜头连接块410上。这样将会实现第一组镜头110和第二组镜头120的位置的相对固定。
77.需要说明的是,虽然在上面的步骤中描述了设置第一组镜头110和第二组镜头120。但是其也可以为首先设置第一组镜头110然后进行参数标定,在第一组镜头110的参数标定完成之后再设置第二组镜头120。因此在本技术所主张的范围并不限定第一组镜头110的设置和标定、第二组镜头120的标定和设置之间的顺序关系。
78.此外,可选地,在对第二组镜头120进行参数标定直至第二组镜头120的成像参数与第一组镜头110的成像参数一致之后,也可以验证两组镜头的立体匹配结果。在匹配良好的情况下,再将第二组镜头120固定至镜头连接块。
79.可选地,双镜头同步调焦的三维图像适配器可以包括镜筒部600,其中镜筒部600可以包括第一镜筒610和第二镜筒620,第一镜筒610与第二镜筒620固定至适配器的基体500或与所述基体500一体成型,并且分别用于容纳第一组镜头110和第二组镜头120。第一组镜头110设置有第一平移定向件111,第一镜筒610设置有第一平移定向槽112,第一平移定向件111被限定在第一平移定向槽112从而实现第一组镜头110的在第一镜筒610中的平移定向。第二组镜头120设置有第二平移定向件121,第二镜筒620设置有第二平移定向槽122,第二平移定向件121被限定在第二平移定向槽122从而实现第二组镜头120在第二镜筒620中的平移定向。其中在本公开中,第一平移定向件111和第二平移定向件121可以为平移定向螺钉的形式。
80.进一步地,双镜头同步调焦的三维图像适配器还可以包括平移导向块420,其中镜头连接块410可以安装至平移导向块420,并且沿着平移导向块420进行移动,从而带动第一组镜头110和第二组镜头120进行平移运动。在本公开中,在将第一组镜头110和第二组镜头120的参数调试为一致将二者固定至镜头连接块410之后,可以将镜头连接块410连接至平移导向块420上。然后将组合后的部件可以安装至镜筒部600。
81.双镜头同步调焦的三维图像适配器还包括调焦旋钮200,调焦旋钮200能够被控制以使得第一组镜头110和第二组镜头120同步移动,以实现第一组镜头110和第二组镜头120同步调焦。调焦旋钮200能够被用户控制以绕三维图像适配器的轴向进行转动,通过调焦旋钮200的转动使得第一组镜头110和第二组镜头120同步移动。在本公开中,调焦按钮200可以设置在双镜头同步调焦的三维图像适配器的外周,这样用户在使用双镜头同步调焦的三维图像适配器时可以方便地对调焦按钮200进行转动。
82.双镜头同步调焦的三维图像适配器还包括传递部300,传递部300用于将调焦旋钮200的转动运动转向为第一组镜头110和第二组镜头120沿轴向的平移运动,其中在调焦的过程中,用户转动调焦旋钮200,通过传递部300将调焦旋钮200的转动运动转换为第一组镜头110和第二组镜头120的平移运动,这样第一组镜头110和第二组镜头120被同步移动以进
行同步调焦来得到清晰的三维图像。
83.传递部300可以包括内齿轮310和丝杠320。内齿轮310的轮齿与调焦旋钮200内侧所设置的轮齿啮合,以便当调焦旋钮200被转动时,内齿轮310进行转动,丝杠320设置有丝杠螺纹并且内齿轮310设置有丝套螺纹,丝杠螺纹和丝套螺纹配合以便将内齿轮310的转动运动转向为丝杠320的轴向运动,并且丝杠320与镜头连接块410固定,从而通过丝杠320的平移运动带动镜头连接块410以及第一组镜头110和第二组镜头120进行平移运动。如图2所示,调焦旋钮200可以为环状结构,并且在环状结构的内侧面可以设置有轮齿,并且内齿轮310可以放置在环状结构的内部,并且其轮齿与调焦旋钮200的轮齿相啮合。这样放调焦旋钮200被转动时,内齿轮310也相应地进行转动。并且可以在内齿轮310的中心处可以设置有圆孔,并且该圆孔的内侧面可以设置丝套螺纹。丝杠320的丝杠螺纹可以旋拧至丝套螺纹,这样可以实现丝杠螺纹与丝套螺纹的连接方式。
84.根据本公开的进一步实施方式,双镜头同步调焦的三维图像适配器还包括内齿轮固定部330,内齿轮固定部330固定至适配器的基体上,例如可以在基体上设置有固定面520,该内齿轮固定部330可以固定至固定面520上。内齿轮固定部330用于限制内齿轮310沿轴向进行移动。图3示出了内齿轮固定部330容纳内齿轮310的示意图。
85.在将组合后的部件可以安装至镜筒部600之后,可以将丝杠320安装在内齿轮310的圆孔中。并且将内齿轮固定部330固定至适配器的基体上。而且通过镜头连接块410的孔与丝杠320上所设置的孔对其,通过连接块螺钉415将镜头连接块410与丝杠320固定连接在一起。最终,形成镜头连接块410与第一组镜头110、第二组镜头120和平移导向块420固定连接的关系。这样通过传递部300将会形成调焦旋钮200与两个镜头之间的运动关系。在调焦的过程中,用户转动调焦旋钮,通过传递部将调焦旋钮的转动运动转换为第一组镜头和第二组镜头的平移运动,这样第一组镜头和第二组镜头被同步移动以进行同步调焦来得到清晰的三维图像。
86.如图3所示,适配器可以包括内窥镜固定座700。内窥镜固定座700固定于三维图像适配器的基体500的第一端,内窥镜推板710与内窥镜固定座700连接,三维图像适配器的基体500与内窥镜固定座700之间可以设置透明窗720,使得三维图像适配器的基体500与内窥镜固定座700之间保持良好的密封性。其中,在将内窥镜推板710和内窥镜固定座700安装至基体500上,在基体500上预先安装了两片透明窗720。如图4所示,内窥镜固定座700用于固定内窥镜2。内窥镜固定座700与内窥镜2的连接方式包括但不限于卡件卡紧连接、旋钮旋紧连接、螺纹固定连接等。
87.如图3所示,适配器可以包括摄像机固定座800。摄像机固定座800固定于三维图像适配器的基体500的第二端,三维图像适配器的基体500与摄像机固定座800之间设置弹性密封圈形式的密封件510,使得三维图像适配器的基体500与摄像机固定座800之间保持良好的密封性。如图4所示,摄像机固定座800用于固定摄像机3。摄像机固定座800与摄像机3之间设置透明窗830,使得摄像机固定座800与摄像机3之间保持良好的密封性。摄像机固定座800与摄像机3的连接方式包括但不限于卡件卡紧连接、旋钮旋紧连接、锁定销连接以及螺纹固定连接等。优选地,锁定销连接包括:摄像机锁定销810设置在摄像机固定座800上,并且摄像机座盖板820固定于摄像机固定座800或一体成型。摄像机3通过摄像机锁定销810和摄像机座盖板820与摄像机固定座800固定连接。
88.在将摄像机固定座800与基体500固定时,可以将密封件510套设在基体500上,然后将摄像机固定座800固定在基体500上,这样密封件510可以夹紧在摄像机固定座800与基体500之间。然后摄像机锁定销810和摄像机座盖板820固定在摄像机固定座800上。
89.根据本公开的进一步实施方式,还提供了一种内窥镜系统。如图4所示,该内窥镜系统可以包括如上所述的三维图像适配器1、内窥镜2和摄像机3。其中内窥镜2可以与三维图像适配器1的内窥镜固定座700固定连接,摄像机3可以与三维图像适配器1的摄像机固定座800固定连接。三者固定连接之后可以构成内窥镜系统,这样医生等终端用户可以使用该内窥镜系统,并且通过控制调焦旋钮来对观察对象进行对焦,从而分别通过第一组镜头110和第二组镜头120得到清晰的二维图像,然后摄像机3可以基于两组镜头的二维图像来合成三维图像,这样可以实现清晰的成像。
90.如图5所示,本公开可以同时达到的技术目标:将两组镜头同步轴向平移;使用者(医生)调焦的操作方式为旋转旋钮,旋转运动利于人手精准控制;调焦旋钮的旋转运动幅度增减尽可能不带来产品尺寸变化,即只改变内部零件而不改变产品外部尺寸可满足不同医生操作习惯;双组镜头始终处于密封腔体内,始终与外界隔离防尘。
91.综上,为解决现有技术的2d内窥镜成像系统仅能获得二维图像以及3d内窥镜系统的两路光学镜头固定不动难以获得最佳的图像清晰度等的问题,本公开提供了一种三维图像适配器的双镜头同步调节机构,可使双镜头调焦过程同步,达到图像清晰的作用,可以很好地解决现有技术方案的临床使用中不能调焦等各种问题。
92.本公开的技术方案中,通过外部设置调焦旋钮,内部设置内齿轮,内齿轮与调焦旋钮啮合,这样可以传递调焦旋钮的转动运动,随后再设置诸如丝杠丝套结构的传递部将转动运动转向为轴向移动,两组镜头随之同时轴向移动。另外,在两组镜头轴向移动时还可以设置弹性件,弹性件可以与两组镜头弹性作用,这样可以消除两组镜头轴向移动的间隙,通过合理的零部件设计方案将上述方法中的双镜头同步调节机构实现。本公开的双镜头同步调节机构的具体实施例中设置了齿轮啮合和丝杠丝套实现转动运动转变为直线运动,使双镜头同步调焦得以实现,其中还可以设置弹性件确保调焦过程的平稳连续,在临床使用上有优秀的操控感,图像的清晰度调节连续平稳,医生对图像清晰度有良好的掌控。
93.本公开通过三维图像适配器中的双镜头同步调节机构,通过设计多种运动的传递,藉由恰当的零件实施运动的传递。综上传递方式的大致原理为:首先双镜头同时固定在镜头固定座上,如有镜头初始校准的需要,镜头固定座应具有两组镜头的轴向偏差的消除结构。将镜头固定座与丝杠连接一起,随丝杠同步做轴向平移运动。丝杠通过丝杠丝套连接到内齿轮上,内齿轮旋转运动转变为丝杠的轴向平移。内齿轮与调焦旋钮齿轮啮合,调焦旋钮的旋转带动内齿轮的旋转,至此调焦旋钮与双组镜头运动关系建立。在满足了关键的运动关系之外,设计了橡胶密封圈达到双组镜头的始终密封,产品具备密封性有广泛的应用场景。
94.同时在具体的实施例中,齿轮啮合和丝杠丝套的组合方法,旋钮的旋转幅度和双镜头的直线运动幅度可以自由无级的匹配,通过调整所述内齿轮的轮齿与所述调焦旋钮的轮齿的模数、和/或通过调整所述丝杠的丝杠螺纹与所述内齿轮的丝套螺纹的螺距,来实现所述调焦旋钮的转动运动幅度与所述第一组镜头和第二组镜头的平移运动幅度的匹配。这样就可得到多种不同需求的匹配,满足不同的医生操作习惯。
95.在本说明书的描述中,参考术语“一个实施例/方式”、“一些实施例/方式”、“示例”、“具体示例”或“一些示例”等的描述意指结合该实施例/方式或示例描述的具体特征、结构、材料或者特点包含于本公开的至少一个实施例/方式或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例/方式或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例/方式或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例/方式或示例以及不同实施例/方式或示例的特征进行结合和组合。
96.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本公开的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
97.本领域的技术人员应当理解,上述实施方式仅仅是为了清楚地说明本公开,而并非是对本公开的范围进行限定。对于所属领域的技术人员而言,在上述公开的基础上还可以做出其它变化或变型,并且这些变化或变型仍处于本公开的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
