1.本实用新型属于车辆工程技术领域,涉及一种汽车转向总成外观检测装置,具体涉及一种汽车转向总成中铝合金管柱及转向内轴的外观检测装置。
背景技术:
2.目前对于汽车转向轴总成的检测主要依赖于人工质检,即生产线依赖于特定的模具或者蒙版对转向轴零部件的特殊位置进行手工检验。这种方法效率、精度都不高,批量采样和依赖肉眼判断的质检方式无法保证精准度且耗费了大量的人力成本。
3.随着机器视觉技术在工业生产中应用的逐渐推广,机器识别精度越来越高,逐渐被广泛的用于工件加工和质检过程中的识别。为提高检测精度、减少螺孔位不匹配及其螺纹质量不高等风险问题的所造成的损失,需要采用高精度工业相机配合计算机视觉算法完成对于汽车转向轴的外观质检。
4.但是,在针对汽车转向轴总成的检测时,高精度工业相机无法对汽车转向轴总成中的铝合金管柱的顶面、侧面、中间段螺孔位置的检测,以及无法对汽车转向总成中转向内轴的螺纹、花键、锁扣等检测位置的检测。
技术实现要素:
5.针对上述现有技术的不足,本实用新型提供一种汽车转向总成外观检测装置,应用于汽车转向轴总成的生产后,可以实现对汽车转向总成待检测位置的全方位检测。
6.为实现上述目的,本实用新型实施例提供了如下的技术方案:
7.第一方面,在本实用新型提供的一个实施例中,提供了一种汽车转向总成外观检测装置,包括:
8.装置主体,装置主体上具有汽车转向轴检测用工作台;
9.协作机器人,包括安装于装置主体上的协作机械臂,协作机械臂用于调节相机模组多姿态位置;
10.相机模组,安装于所述协作机械臂末端,用于对置于工作台上的汽车转向轴总成视觉采样;以及
11.固定工装模组,设置于所述工作台上,固定工装模组用于将工作台上汽车转向轴总成的待测工件固定。
12.在汽车转向轴检测的时候,通固定工装模组将待测工件进行紧密固定在固定工装模组内,以协作机械臂带动相机模组在短时间内完成多姿态的视觉检测,以配合计算机视觉算法完成对于汽车转向轴的外观质检,检测操作便捷,无需安装多机位相机。
13.作为本实用新型的进一步方案,所述装置主体还包括承载所述工作台以及协作机械臂的工台支架,所述协作机械臂自带配重块安装在所述工作台上,或者所述协作机械臂悬挂安装于所述工作台上方的工台支架上。
14.协作机械臂为六自由度机械臂,协作机械臂安装在工作台或工作台上方的工台支
架上,均能在空间中调节改变末端位置相机模组的三维位置,还具有改变末端位置相机模组朝向的功能,以配合相机模组完成对工件全方位的外观质检。
15.作为本实用新型的进一步方案,所述装置主体上还包括工控主机和显示器,所述工控主机用于控制所述协作机器人以及相机模组动作,所述相机模组还连接显示器,用于将视觉采样结果输出并显示于所述显示器上。
16.作为本实用新型的进一步方案,所述相机模组包括:
17.相机本体,相机本体上设有用于视觉采样的镜头;
18.光源,光源为环形光源,沿相机本体的镜头周向分布;以及
19.相机模组支架,相机模组支架安装在协作机械臂末端,所述相机模组支架兼容多种型号的相机本体以及光源安装。
20.相机模组通过相机模组支架安装在协作机械臂末端时,方便协作机械臂末端带动相机模组支架上安装的相机本体以及光源进行三维空间位置以及朝向的调节,实现相机本体的多角度拍摄及视觉采样。
21.作为本实用新型的进一步方案,所述固定工装模组包括适应不同型号待测工件的铝合金管柱支架和内轴支架,所述铝合金管柱支架和内轴支架均位于工作台上,以方便在启动质检程序时,在工控主机控制下,协作机器人的协作机械臂能够带动相机模组实现多姿态和多角度的视觉采样。
22.作为本实用新型的进一步方案,所述铝合金管柱支架包括至少两个夹持件,所述夹持件分布于工作台上,夹持件之间用于固定汽车转向轴的铝合金管柱。
23.作为本实用新型的进一步方案,所述夹持件包括:
24.压紧端板,压紧端板一侧设有与汽车转向轴的铝合金管柱相抵接的抵靠面;
25.活塞杆,位于压紧端板远离抵靠面的一侧,活塞杆用于驱动压紧端板移动以使夹持件夹持固定汽车转向轴的铝合金管柱;
26.驱动缸,与所述活塞杆连接,以驱动活塞杆伸缩;以及
27.支撑块,支撑块固定在工作台上,用于支撑驱动缸并对所述活塞杆导向。
28.在对铝合金管柱固定时,以夹持件的驱动缸为动力,驱动活塞杆伸缩,利用夹持件的压紧端板相对或相向移动,以将夹持件之间的汽车转向轴的铝合金管柱固定,固定效果好。
29.作为本实用新型的进一步方案,所述夹持件还包括:
30.推块,安装在所述活塞杆靠近压紧端板的一端;
31.驱动电机,安装在所述推块上,在活塞杆伸缩时随推块一同移动;
32.驱动轴,驱动轴一端与驱动电机的电机轴连接,驱动轴另一端固定在所述压紧端板远离抵靠面的一侧,驱动轴用以带动压紧端板移动的同时,在驱动电机驱动下带动压紧端板转动,以调节夹持件之间汽车转向轴的铝合金管柱的待检测位置。
33.作为本实用新型的进一步方案,所述铝合金管柱支架包括三个夹持件,所述夹持件呈三角形状分布于工作台上,夹持件之间用于固定汽车转向轴的铝合金管柱,夹持件的抵靠面用于抵接铝合金管柱的三个不同端面。
34.作为本实用新型的进一步方案,所述内轴支架包括:
35.两个平行设置的托臂,所述托臂安装在同轴设置的承托轴上;
36.轴承座,位于所述承托轴的两端,用于架设托臂且用于承托轴的转动;以及
37.换向轴,与至少一根托臂的承托轴同轴连接,用于驱动托臂转动,带动置于两个平行托臂之间的内轴旋转换向,以对内轴上分布于不同方位待测位置的全方位视觉采样。
38.与现有技术相比,本实用新型的有益效果是:
39.本实用新型的实施方式中公开的汽车转向总成外观检测装置,相比常规的汽车转向轴检测工装,巧妙地利用了协作机械臂末端安装相机模组以进行多姿态多角度的视觉采集,并利用固定工装模组,以将铝合金管柱及内轴固定于工作台上,利用相机模组进行在短时间内完成多姿态的视觉检测,以配合计算机视觉算法完成对于汽车转向轴的外观质检,检测操作便捷,无需安装多机位相机。
附图说明
40.为了更清楚地说明本实用新型实施例中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例。
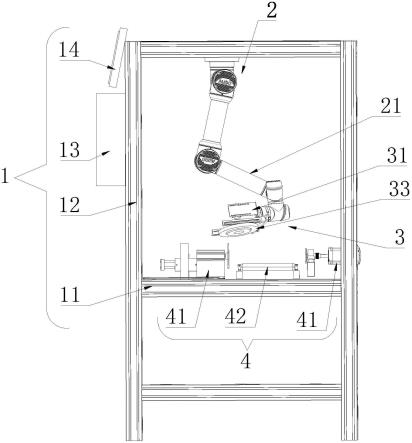
41.图1为本实用新型的汽车转向总成外观检测装置的结构示意图。
42.图2为本实用新型的汽车转向总成外观检测装置中相机模组的结构示意图。
43.图3为本实用新型的汽车转向总成外观检测装置中铝合金管柱支架的结构示意图。
44.图4为本实用新型的汽车转向总成外观检测装置中内轴支架的结构示意图。
45.图5为本实用新型的汽车转向总成外观检测装置中双夹持件检测时的结构示意图。
46.图6为本实用新型的汽车转向总成外观检测装置中三夹持件检测时的结构示意图。
47.附图标记说明:
48.1、装置主体;11、工作台;12、工台支架;13、工控主机;14、显示器;
49.2、协作机器人;21、协作机械臂;
50.3、相机模组;31、相机模组支架;32、相机本体;321、镜头;33、光源;
51.4、固定工装模组;
52.41、铝合金管柱支架;411、夹持件;4111、支撑块;4112、驱动缸;4113、活塞杆;4114、推块;4115、驱动电机;4116、驱动轴;4117、压紧端板;4118、抵靠面;
53.42、内轴支架;421、托臂;422、承托轴;423、轴承座;424、换向轴。
具体实施方式
54.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
55.本技术发明人发现,现有的汽车转向轴总成的检测主要依赖于人工质检,生产线依赖于特定的模具或者蒙版对转向轴零部件的特殊位置进行手工检验。这种方法效率、精度都不高,批量采样和依赖肉眼判断的质检方式无法保证精准度且耗费了大量的人力成
本;在检测时,高精度工业相机无法对汽车转向轴总成中的铝合金管柱的顶面、侧面、中间段螺孔位置的检测,以及无法对汽车转向总成中转向内轴的螺纹、花键、锁扣等检测位置的检测。
56.为解决上述问题,本实用新型实施例提供的一种汽车转向总成外观检测装置,通过全方位多姿态的相机模组结合对汽车转向轴总成定位的固定工装模组以将铝合金管柱及内轴固定于工作台上,利用相机模组进行在短时间内完成多姿态的视觉检测,以配合计算机视觉算法完成对于汽车转向轴的外观质检,检测操作便捷,无需安装多机位相机。
57.以下结合附图并通过具体实施方式来进一步说明本实用新型的技术方案。
58.图1示出了安装有本实用新型的汽车转向总成外观检测装置的结构示意图。
59.如图1所示,在本实用新型提供的第一实施方式中,所述的汽车转向总成外观检测装置,包括装置主体1、协作机器人2、相机模组3以及固定工装模组4。
60.在本实用新型实施例中,所述装置主体1上具有汽车转向轴检测用工作台11,所述协作机器人2包括安装于装置主体1上的协作机械臂21,协作机械臂21用于调节相机模组3多姿态位置,所述相机模组3安装于所述协作机械臂21末端,用于对置于工作台11上的汽车转向轴总成视觉采样,所述固定工装模组4设置于所述工作台11上,固定工装模组4用于将工作台11上汽车转向轴总成的待测工件固定。
61.在本实施例中,在汽车转向轴检测的时候,通固定工装模组4将待测工件进行紧密固定在固定工装模组4内,以协作机械臂21带动相机模组3在短时间内完成多姿态的视觉检测,以配合计算机视觉算法完成对于汽车转向轴的外观质检,检测操作便捷,无需安装多机位相机。
62.其中,所述装置主体1还包括承载所述工作台11以及协作机械臂21的工台支架12,所述协作机械臂21自带配重块安装在所述工作台11上,或者所述协作机械臂21悬挂安装于所述工作台11上方的工台支架12上,在本实施例中,协作机器人2的重复精度控制在0.02mm范围内,工作半径在900mm以上,优选地,所述协作机器人2的型号可以采用遨博-i5机器人。
63.在本实用新型的一个实施例中,所述协作机械臂21自带配重块安装在所述工作台11上。在工作时,以协作机械臂21的配重块安装位置为基座,协作机械臂21采用六自由度机械臂,通过两个关节以及两根连接件的协作联动操作,并配合基座上安装的用以驱动协作机械臂21的转向电机以及位于协作机械臂21末端的用于旋转调节的旋转电机及旋转臂,实现对协作机械臂21末端安装的相机模组3的多姿态运动,协作机械臂21能在空间中调节改变末端位置相机模组3的三维位置,还具有改变末端位置相机模组3朝向的功能,以配合相机模组3完成对工件全方位的外观质检。
64.在本实用新型的一个实施例中,所述协作机械臂21悬挂安装于所述工作台11上方的工台支架12上。在工作时,以协作机械臂21悬挂的安装点为中心,协作机械臂21采用六自由度机械臂,利用安装点中心为圆心,配合协作机械臂21的两个关节以及两根连接件的协作联动操作,并通过安装点安装的用以驱动协作机械臂21的转向电机以及位于协作机械臂21末端的用于旋转调节的旋转电机及旋转臂,实现对协作机械臂21末端安装的相机模组3的多姿态运动。
65.优选地,所述协作机械臂21悬挂的安装点位于固定工装模组4正上方,在协作机械臂21的多姿态运动下,改变末端位置相机模组3的三维位置以及拍摄角度,使配合相机模组
3完成对工件全方位的外观质检。
66.所述装置主体1上还包括工控主机13和显示器14,所述工控主机13用于控制所述协作机器人2以及相机模组3动作,所述相机模组3还连接显示器14,用于将视觉采样结果输出并显示于所述显示器14上。
67.在本实用新型的一个实施例中,所述工控主机13的参数设计时,工控主机13的cpu采用intel i5,工控主机13的硬盘选用500gb,内存选用16gb,以满足使用需求。优选地,所述显示器14为触控屏幕,型号选用佰疆智能显示器,例如,型号为ppc1701的17寸显示屏、触摸屏于一体的工控一体机。
68.在本实施例中,参见图1和图2所示,所述相机模组3包括相机本体32、光源33以及相机模组支架31。其中,相机模组支架31安装在协作机械臂21末端,所述相机模组支架31兼容多种型号的相机本体32以及光源33安装。相机本体32上设有用于视觉采样的镜头321,光源33为环形光源,沿相机本体32的镜头321周向分布。
69.优选地,在本实用新型的一个实施例中,所述相机本体32采用4k分辨率,帧率10fps以上相机,例如:相机本体32的型号为mv-ch089-10gc。所述镜头321的参数设定时,工作距离为300-500mm,视野范围为300*200mm,其中,镜头321的型号可选的有mvl-kf0814m-12mpe。所述光源33为环形光源,光源33的型号可以采用mv-lrds-200-90-w光源。
70.在进行相机模组3安装时,通过相机模组支架31安装在协作机械臂21末端,协作机械臂21末端带动相机模组支架31上安装的相机本体32以及光源33进行三维空间位置以及朝向的调节,实现相机本体32的多角度拍摄及视觉采样。
71.在本实用新型的一个实施例中,参见图1、图3和图4所示,所述固定工装模组4包括适应不同型号待测工件的铝合金管柱支架41和内轴支架42,所述铝合金管柱支架41和内轴支架42均位于工作台11上,材料选用铝材质,并能够兼容多种相机以及光源型号,以方便在启动质检程序时,在工控主机13控制下,固定工装模组4能适应不同型号的工件,进行自动定位以及旋转工件进行多角度拍摄,配合协作机器人2的协作机械臂21能够带动相机模组3实现多姿态和多角度的视觉采样。
72.所述铝合金管柱支架41包括至少两个夹持件411,所述夹持件411分布于工作台11上,夹持件411之间用于固定汽车转向轴的铝合金管柱。
73.在本实用新型的一个实施例中,参见图1和图5所示,所述铝合金管柱支架41包括两个夹持件411,两个夹持件411相对设置,用于将两个夹持件411之间的汽车转向轴的铝合金管柱固定。
74.在本实用新型的一个实施例中,参见图1和图6所示,所述铝合金管柱支架41包括三个夹持件411,所述夹持件411呈三角形状分布于工作台11上,夹持件411之间用于固定汽车转向轴的铝合金管柱,夹持件411的抵靠面4118用于抵接铝合金管柱的三个不同端面。
75.其中,参见图3所示,所述夹持件411包括压紧端板4117、活塞杆4113、驱动缸4112以及支撑块4111。所述压紧端板4117一侧设有与汽车转向轴的铝合金管柱相抵接的抵靠面4118,所述活塞杆4113位于压紧端板4117远离抵靠面4118的一侧,活塞杆4113用于驱动压紧端板4117移动以使夹持件411夹持固定汽车转向轴的铝合金管柱。所述驱动缸4112与所述活塞杆4113连接,以驱动活塞杆4113伸缩,所述支撑块4111固定在工作台11上,用于支撑驱动缸4112并对所述活塞杆4113导向。
76.在对铝合金管柱固定时,以夹持件411的驱动缸4112为动力,驱动活塞杆4113伸缩,利用夹持件411的压紧端板4117相对或相向移动,以将夹持件411之间的汽车转向轴的铝合金管柱固定,固定效果好。
77.在本实用新型的一个实施例中,所述夹持件411还包括推块4114、驱动电机4115以及驱动轴4116。所述推块4114安装在所述活塞杆4113靠近压紧端板4117的一端;所述驱动电机4115安装在所述推块4114上,在活塞杆4113伸缩时随推块4114一同移动;所述驱动轴4116一端与驱动电机4115的电机轴连接,驱动轴4116另一端固定在所述压紧端板4117远离抵靠面4118的一侧,驱动轴4116用以带动压紧端板4117移动的同时,在驱动电机4115驱动下带动压紧端板4117转动,以调节夹持件411之间汽车转向轴的铝合金管柱的待检测位置。
78.所述夹持件411在相互配合将汽车转向轴的铝合金管柱固定的同时,在夹持件411数量为两个时,还可以相互配合进行调节铝合金管柱的转向,进行不同角度和位置的切换,配合相机模组3以更全面的完成视觉采样。
79.在本实施例中,参见图4所示,所述内轴支架42包括轴承座423、换向轴424以及两个平行设置的托臂421。其中,所述托臂421安装在同轴设置的承托轴422上,所述轴承座423位于所述承托轴422的两端,用于架设托臂421且用于承托轴422的转动,所述换向轴424与至少一根托臂421的承托轴422同轴连接,用于驱动托臂421转动,带动置于两个平行托臂421之间的内轴旋转换向,以对内轴上分布于不同方位待测位置的全方位视觉采样。
80.本实用新型的工作原理是:
81.在对汽车转向轴总成外观检测时,以固定工装模组4的铝合金管柱支架41对铝合金管柱固定,以内轴支架42对内轴固定。当需要对铝合金管柱视觉采样时,以工控主机13控制协作机械臂21动作,带动相机模组3以多姿态进行三维空间位置的调节,以及相机模组3的镜头321多视角拍摄的调节,与此同时,利用铝合金管柱支架41上驱动缸4112以及驱动电机4115进行夹持位置的微调节以及铝合金管柱方位的微调节,以采集到铝合金管柱顶端所有螺孔位及铝合金管柱中间段螺孔位为准,用以根据视觉采样结果判断顶端所有螺孔位是否正确以及中间段螺孔位是否正确。
82.当需要对转向内轴视觉采样时,以工控主机13控制协作机械臂21动作,带动相机模组3以多姿态进行三维空间位置的调节,以及相机模组3的镜头321多视角拍摄的调节,与此同时,利用内轴支架42上换向轴424驱动两个托臂421的转动进行转向内轴轴向的旋转,以切换不同的侧面朝向相机模组3的镜头321,配合相机模组3的镜头321的拍摄,以采集到转向内轴上螺纹、转向内轴顶端和底端花键、转向内轴上锁扣以及焊接部位为准,用以根据视觉采样结果判断转向内轴上是否有螺纹、转向内轴顶端是否有花键、转向内轴底端是否有花键、转向内轴上锁扣是否存在、转向内轴上焊接是否正确,进而通过本实用新型可以实现汽车转向总成中的铝合金管柱的顶面、侧面、中间段螺孔位置的检测以及汽车转向总成中转向内轴的螺纹、花键、锁扣等检测位置的检测。
83.在本实用新型的汽车转向总成外观检测装置检测时,质检工人将待测工件放置于工作台11内,由装置主体1上固定工装模组4进行紧密固定,固定工装模组4起到固定待测工件的目的。此时启动质检程序,协作机械臂21会带动相机模组3完成在20秒内完成多姿态(共计7-15组姿态,具体采样姿态定义取决于管柱型号)的视觉采样,并将检测结果输出至显示器14上。
84.在本实用新型中,如果检测到异常状况(如机械臂碰撞等),工控主机13会触发警报,终止检测流程。
85.综上所述,本实用新型的实施方式中公开的汽车转向总成外观检测装置,相比常规的汽车转向轴检测工装,巧妙地利用了协作机械臂21末端安装相机模组3以进行多姿态多角度的视觉采集,并利用固定工装模组4,以将铝合金管柱及内轴固定于工作台11上,利用相机模组3进行在短时间内完成多姿态的视觉检测,以配合计算机视觉算法完成对于汽车转向轴的外观质检,检测操作便捷,无需安装多机位相机。
86.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。