1.本实用新型涉及水库湖泊水处理技术领域,具体地涉及可移动的主动生态水质净化系统。
背景技术:
2.近几年来,地表水环境质量状况总体良好,水质总体保持稳定。但从湖泊、水库监测断面中,总体形势不容乐观。由于长期水体处于相对静止状态,部分优良湖泊、水库水质水质有所下降,水质从ⅲ类下降至ⅳ类,主要影响指标为浊度、总磷、化学需氧量和五日生化需氧量等超标问题。
3.现有技术中,为解决解决水库、湖泊水质不达标的问题,有两类方法:自净法和生物吸附法;其中:
4.所谓自净法,其原理非常简单,即主要采取控制排污量、让水体自净恢复,简而言之就是用时间和经济发展速度换取水体自净;自净法的缺陷在于:
5.1.由于自净速度太慢,从而导致效率极为低下,失去了大面积推广的意义;例如,采用自净法让湖泊、水库中的水质自净至达标的三类及以上的水质,需要5年以上,速度较缓慢;这个速度显然是无法接受的;
6.2.由于排污客观上是无法控制的,这是与经济活动相悖的,从而使得控制排污来减少污染物流入实际上无法严格执行,也就失去了意义;
7.现有技术的研究主要集中在生物吸附法;所谓生物吸附法,就是在涉及景观的湖泊、水库,部份通过建设漂浮式花坛景观或护坡工程进行绿化,由植物群落对水体中的总磷、氮、化学需氧量和五日生化需氧量等进行生物吸附和吸收;典型的如申请号为cn201821090930.0,公开号为cn208617488u,实用新型名称为水生景观植物的景观生态浮台结构的中国实用新型,即是采用了在浮台上种植植物,然后依靠植物的根系进行吸附;
8.生物吸附法的有点相较于自净法很明显,即对周边的水质水域有一定的改善效果,且起到了绿化和景观作用;生物学方法的缺陷在于:
9.1.由于无论是在水中搭建生态浮台还是在岸边种植履绿植,都是位置相对固定的设施,从而导致虽然对周边水体有改善作用,但机动性极差,只能对有污染的地方临时建设,无法做到哪里有污染就去到哪里治污;
10.2.由于无论是在水中搭建生态浮台还是在岸边种植履绿植,仅仅将其悬浮于水面种植,虽然水生植物根系发达,可对颗粒态氮、磷进行吸附、截留和促进沉降,但在治理过程中植物是相对静止的,完全依赖于根系的主动吸附作用,从而造成无法充分利用水生植物根系的净化功能,导致效率低下,耗时较长;
11.3.由于生物浮台一类装置都是根据污染地点临时搭建的,当治理完成后即告拆除,从而使得装置利用率低,浪费很大。
技术实现要素:
12.本实用新型针对上述问题,提供可移动的主动生态水质净化系统,其目的在于极大提高净化效率;提高重复率高,降低成本。
13.为解决上述问题,本实用新型提供的技术方案为:
14.一种可移动的主动生态水质净化系统,包含以下组成部分:
15.浮式围栏,用于在水体中划定净化作业区域;所述浮式围栏为上端开口、下端封闭的竖直筒状结构,上端与水面高程相同,高度与所述净化作业区域的高度相同;
16.主动净化浮船,放置于所述浮式围栏内,包含船体和用于为所述主动净化浮船的运动提供动力的动力驱动单元;所述船体上种植有用于净化水质的水生植物;
17.水质监测传感器组,包含多个水质监测传感器,布设于所述浮式围栏内的底部上;
18.总控单元,分别与所述主动净化浮船和所述水质监测传感器电信号耦接。
19.优选地,所述浮式围栏包含轻质骨架、用于阻挡鱼类进入的阻隔层和铺底层;所述轻质骨架由长杆首尾相接构成,形成封闭的平面几何结构;所述阻隔层为竖直型圆筒,半径与所述轻质骨架的半径相同,高度与所述净化作业区域的深度相同,上端与所述轻质骨架无缝连接,下端与所述铺底层无缝连接。
20.优选地,所述轻质骨架包含两个细长型的柔性长杆首尾相接构成的圆形骨架;其中:两个所述圆形骨架中半径相对较长的一个为外环骨架,半径相对较短的一个为内环骨架;所述外环骨架与所述内环骨架的半径的差由人工预设;所述外环骨架与所述内环骨架以同心圆的形式嵌套设置;
21.所述阻隔层包含外阻隔层和内阻隔层;所述外阻隔层为由土工织物网围成的竖直型圆筒,半径与所述外环骨架的半径相同,且上端与所述外环骨架无缝连接,高度与所述净化作业区域的深度相同;所述内阻隔层为由土工织物网围成的竖直型圆筒,半径与所述内环骨架的半径相同,且上端与所述内环骨架无缝连接,高度与所述净化作业区域的深度相同。
22.优选地,所述铺底层为由土工织物网制成的圆形片状层结构,位于所述外环骨架的正下方,半径与所述外环骨架的半径相同;所述铺底层外缘与所述外阻隔层无缝连接;所述内阻隔层与所述铺底层无缝连接;所述水质监测传感器组以网格的形式,均匀布设在所述铺底层上。
23.优选地,所述主动净化浮船还包含用于为所述主动净化浮船提供电力的供电单元和用于为所述主动净化浮船与总控单元提供通信连接的第一网络通信单元;其中:
24.所述供电单元和所述第一网络通信单元固定安装在所述船体上;所述供电单元分别与所述动力驱动单元、所述第一网络通信单元电连接;所述动力驱动单元与所述第一网络通信单元电信号耦接;
25.所述主动净化浮船通过所述第一网络通信单元向所述总控单元发送运动状态信号,并接收来自所述总控单元的用于控制所述主动净化浮船的动作的运动控制信号;
26.所述运动状态信号包含船体航速、船体加速度、航向角、gps坐标、前方目标相对距离、前方目标相对速度、左侧目标相对距离、左侧目标相对速度、右侧目标相对距离、右侧目标相对速度、后方目标相对距离和后方目标相对速度。
27.优选地,所述主动净化浮船还包含固定安装在所述船体上的,用于为所述动力驱
动单元提供来自所述总控单元的所述运动控制信号,且用于向所述总控单元发送所述运动状态信号的运动控制单元;所述动力驱动单元与通过所述运动控制单元所述第一网络通信单元电信号耦接;
28.所述运动控制单元包含用于采集所述运动状态信号的船体运动状态传感器组;所述船体运动状态传感器组包含速度传感器、加速度传感器、航向角传感器、gps芯片、前避障雷达、侧避障雷达和后避障雷达;其中:
29.所述速度传感器用于采集所述船体航速;所述加速度传感器用于采集所述船体加速度;所述航向角传感器用于采集所述航向角;所述gps芯片用于采集所述gps坐标;
30.所述前避障雷达用于采集所述前方目标相对距离,所述前方目标相对速度;所述侧避障雷达用于采集所述左侧目标相对距离,所述左侧目标相对速度,所述右侧目标相对距离和所述右侧目标相对速度;所述后避障雷达用于采集所述后方目标相对距离和所述后方目标相对速度。
31.优选地,所述浮式围栏还包含多个浮动种植槽;所述浮动种植槽由可自主漂浮于水面的轻质材料制成,均匀设置在所述外环骨架与所述内环骨架之间的水面上,且通过绳索与所述外环骨架与所述内环骨架固定连接;所述浮动种植槽上种植有用于净化水质的水生植物;所述水生植物的根系垂入水中。
32.优选地,其特征在于:所述水质监测传感器包含用于为所述水质监测传感器与所述总控单元提供通信连接的第二网络通信单元;
33.所述水质监测传感器通过所述第二网络通信单元向所述总控单元传回的用于表征水质监测指标的水质数据信号,并接收来自所述总控单元的用于控制所述水质监测传感器组开启、关闭、初始化以及采集模式变更的传感器控制信号;所述水质监测指标包含酸碱度、透明度、氮质量浓度和磷质量浓度。
34.本实用新型与现有技术对比,具有以下优点:
35.1.由于本实用新型采用了主动净化浮船主动巡航,搅动净化作业区域中的水逆时针转动,在转动过程中又有主动净化浮船的船载的水生植物的根系对水体进行过滤和吸附,从而极大提高了净化效率;
36.2.由于本实用新型采用了按污染严重度排列治理优先级,并对应派出专门的主动净化浮船主动去优先级高的区域悬停吸附,且船下的水体仍然是流动不停的,相当于在根系上被动过滤,从而进一步加快了净化速度;
37.3.由于本实用新型的设备可以通过拖拽的方式布设到需要治理的区域,且面积、深度都可调节,从而使得本实用新型的设备可以在治理完成后安设到下一个需要治理的区域,重复利用率高,极大降低了成本。
附图说明
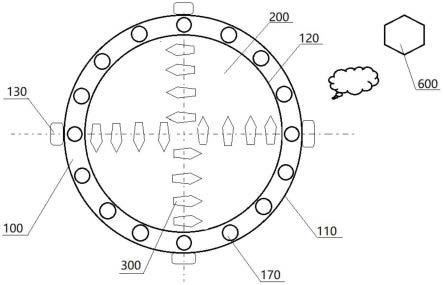
38.图1为本实用新型具体实施例的净化系统的俯视示意图;
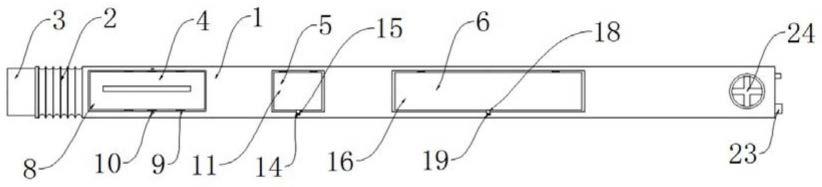
39.图2为本实用新型具体实施例的净化系统的侧视剖面示意图;
40.图3为本实用新型具体实施例的浮动种植槽的结构示意图;
41.图4为本实用新型具体实施例的主动净化浮船的结构示意图;
42.图5为本实用新型具体实施例的净化方法的流程示意图。
43.其中:100.浮式围栏,110.外环骨架,120.内环骨架,130.浮块,140.外阻隔层,150.内阻隔层,160.铺底层,170.浮动种植槽,171.水生植物,172. 根系,200.净化作业区域,300.主动净化浮船,310.船体,320.动力驱动单元,330.第一网络通信单元,340.太阳能电池板,500.水质监测传感器,600. 总控单元。
具体实施方式
44.下面结合具体实施例,进一步阐明本实用新型,应理解这些实施例仅用于说明本实用新型而不用于限制本实用新型的范围,在阅读了本实用新型之后,本领域技术人员对本实用新型的各种等价形式的修改均落于本技术所附权利要求所限定的范围。
45.可移动的主动生态水质净化系统,包含以下组成部分:
46.如图1所示,浮式围栏100,用于在水面划定净化作业区域200,使净化作业区域200在水面内外隔离;浮式围栏100包含轻质骨架和用于使轻质骨架浮于水面提供浮力的浮块130;轻质骨架由长杆首尾相接构成,形成封闭的平面几何结构,且与浮块130固定连接。
47.本具体实施例中,轻质骨架包含两个细长型的柔性长杆首尾相接构成的圆形骨架;其中:两个圆形骨架中半径相对较长的一个为外环骨架110,半径相对较短的一个为内环骨架120;外环骨架110与内环骨架120的半径的差由人工预设;外环骨架110与内环骨架120以同心圆的形式嵌套设置;外环骨架110与内环骨架120上都固定连接有多个浮块130。
48.本具体实施中,外环骨架110的半径为220m~450m;内环骨架120的半径为200m~400m。
49.本具体实施中,外环骨架110与内环骨架120的半径的差为10m~20m。
50.本具体实施中,柔性长杆为竹竿,采用绑扎的方式实现固定。
51.如图2所示,本具体实施例中,轻质骨架还包含用于阻挡鱼类进入净化作业区域200的阻隔层和铺底层;阻隔层包含外阻隔层140、内阻隔层150;外阻隔层140为由土工织物网围成的竖直型圆筒,半径与外环骨架110的半径相同,且上端与外环骨架110无缝连接,高度与净化作业区域200的深度相同;内阻隔层150为由土工织物网围成的竖直型圆筒,半径与内环骨架120的半径相同,且上端与内环骨架120无缝连接,高度与净化作业区域200的深度相同;铺底层为由土工织物网制成的圆形片状层结构,位于外环骨架110的正下方,半径与外环骨架110的半径相同;铺底层外缘与外阻隔层140无缝连接;内阻隔层 150与铺底层无缝连接;水质监测传感器组以网格的形式,均匀布设在铺底层上。
52.本具体实施例中,水质监测传感器500之间的距离为50m。
53.需要说明的是,设置土工织物网制成的外阻隔层140、内阻隔层150和铺底层,其目的在于实现网箱围护,防止较大食草鱼类大量吞食;土工织物网与轻质骨架的无缝连接采用包裹的方式,全面包裹轻质骨架的表面。
54.如图3所示,本具体实施例中,浮式围栏100采用漂浮网箱型式,还包含多个浮动种植槽170;浮动种植槽170由可自主漂浮于水面的轻质材料制成,均匀设置在外环骨架110与内环骨架120之间的水面上,且通过绳索与外环骨架110 与内环骨架120固定连接;浮动种植槽170上种植有用于净化水质的水生植物 171;水生植物171的根系172垂入水中。这样,浮动种植槽170上种植的水生植物171就可以通过根系172净化外阻隔层140与内阻隔层150之间的水体,且防止污水从净化作业区域200中逃逸。
55.本具体实施例中,连接浮动种植槽170、外环骨架110和内环骨架120用细质不锈钢钢丝线索;
56.如图4所示,主动净化浮船300,放置于浮式围栏100内,包含船体310和用于为主动净化浮船300的运动提供动力的动力驱动单元320,其中:船体310 由可自主漂浮于水面的轻质材料制成;船体310上种植有用于净化水质的水生植物171;水生植物171的根系172垂入水中;动力驱动单元320固定安装在船体310上;每个主动净化浮船300具有一个独一无二的浮船编号;每个主动净化浮船300还包含一个用于表征当前的运行模式的运行模式标志;运行模式为一个字符串,包含“巡航”、“净化中”和“故障”;
57.本具体实施例中,水生植物171包含沉水型水生植物171和高杆水生植物 171,其中:沉水型水生植物171包含但不限于金鱼藻、苦草、菹草;高杆水生植物171包含但不限于荷花、水葱、芦苇;沉水型水生植物171的作用在于利用水上枝叶、水下根系172通过过滤、吸附、截留和转化,对湖泊原水进行净化;高杆水生植物171的作用在于与沉水型水生植物171配合形成绿化景观。
58.本具体实施例中,动力驱动单元320采用传统的螺旋桨推进方案;之所以采用螺旋桨而非其他喷射类推进方案,是由于本系统对于动力驱动单元320的速度要求不高,而是更强调扭力,因此螺旋桨推进更适合此应用场景,且相对而言成本更低。
59.本具体实施例中,主动净化浮船300还包含用于为主动净化浮船300提供电力的供电单元和用于为主动净化浮船300与总控单元600提供通信连接的第一网络通信单元330;其中:
60.供电单元和第一网络通信单元330固定安装在船体310上;供电单元分别与动力驱动单元320、第一网络通信单元330电连接;动力驱动单元320与第一网络通信单元330电信号耦接。
61.本具体实施中,供电单元包含太阳能电池板340、蓄电池和用于整流以及稳压的电流伺服电路;太阳能电池板340的电流输出端,通过电流伺服电路,与蓄电池的充电端电连接;蓄电池的供电端与动力驱动单元320电连接。
62.本具体实施中,太阳能电池板340焊接在船体310上。
63.主动净化浮船300还包含固定安装在船体310上的,用于为动力驱动单元320 提供来自总控单元600的运动控制信号,且用于向总控单元600发送运动状态信号的运动控制单元;动力驱动单元320与通过运动控制单元第一网络通信单元330电信号耦接。
64.本具体实施例中,船体310采用轻质材料制成骨架,并固定了轻质材料用于漂浮;轻质材料设置于主动净化浮船300底部,用于种植水生植物171,轻质材料的底部设有开口使水生植物171根系172深入水体。
65.当主动净化浮船300的运行模式为“巡航”时,按照人工预设的巡航路线行进;当主动净化浮船300的运行模式为“巡航”或“故障”时,在原地保持静止。
66.本具体实施例中,主动净化浮船3004条一组,以内环骨架120的圆心、按等差数列排列的半径、相同的角速度,做逆时针方向,即通地球自转方向一致,的巡航;这种巡航方式的作用在于,促进本系统内的水体缓慢匀速转动,实现流水不腐的净化功能,且主动净化浮船300在运行过程中,船载的根系172对水体进行动态净化。
67.本具体实施例中,主动净化浮船300的数量为水质监测传感器500的数量的一倍,
这样就能保证在极端情况下,每个水质监测传感器500的覆盖区域都污染超标,都可以派遣等同数量条主动净化浮船300去进行净化工作,并保证仍有主动净化浮船300在进行例行巡航,推动水流旋转。
68.这样,在主动净化浮船300运行的过程中,船载的根系172对水体进行动态物理过滤、生态吸附和化学分解转化,从而达到净化水质的作用。
69.运动状态信号包含船体航速、船体加速度、航向角、gps坐标、前方目标相对距离、前方目标相对速度、左侧目标相对距离、左侧目标相对速度、右侧目标相对距离、右侧目标相对速度、后方目标相对距离和后方目标相对速度。
70.运动控制单元包含用于采集运动状态信号的船体运动状态传感器组;船体运动状态传感器组包含速度传感器、加速度传感器、航向角传感器、gps芯片、前避障雷达、侧避障雷达和后避障雷达;其中:
71.速度传感器用于采集船体航速;加速度传感器用于采集船体加速度;航向角传感器用于采集航向角;gps芯片用于采集gps坐标。
72.前避障雷达用于采集前方目标相对距离,前方目标相对速度;侧避障雷达用于采集左侧目标相对距离,左侧目标相对速度,右侧目标相对距离和右侧目标相对速度;后避障雷达用于采集后方目标相对距离和后方目标相对速度。
73.需要说明的是,本具体实施例的主动净化浮船300选取了市面上常用的自动驾驶软件,无需独立开发专门的避障策略,原因在于整个系统是一个相对封闭的环境,主动净化浮船300在行驶中可以认为是处于理想环境;另一方面主动净化浮船300的行驶路径十分简单、有规律;因此采购市售成熟自动驾驶软件成本低、效果好,非常适合本实用新型的应用场景。
74.如图2所示,水质监测传感器组,包含多个水质监测传感器500,布设于浮式围栏100的下方;每个水质监测传感器500具有一个独一无二的传感器编号。
75.每个水质监测传感器500都包含用于为水质监测传感器500与总控单元600 提供通信连接的第二网络通信单元。
76.需要说明的是,本具体实施例中第二网络通信单元连接一个设置于内环骨架 120和外环骨架110之间的太阳能电池板340;这个太阳能电池板340的类型与主动净化浮船300上的一样,但功率不同。
77.需要进一步说明的是,第一网络通信单元330和第二网络通信单元都是采用物联网技术实现与总控单元600互联,成本低,速度快。
78.总控单元600,用于接收来自水质监测传感器组传回的用于表征水质监测指标的水质数据信号,接收来自主动净化浮船300传回的运动状态信号,向水质监测传感器组发送用于控制水质监测传感器组开启、关闭、初始化以及采集模式变更的传感器控制信号,以及向主动净化浮船300发送用于控制主动净化浮船300的动作的运动控制信号;水质监测指标包含酸碱度、透明度、氮质量浓度和磷质量浓度。
79.如图5所示,一种根据可移动的主动生态水质净化系统的可移动的主动生态水质净化方法,包含以下步骤:
80.s100.测定需要进行净化的净化作业区域200的深度和净化作业区域200的半径。
81.s200.设定外环骨架110的半径为净化作业区域200的半径;设定外阻隔层 140的
高度为净化作业区域200的深度。
82.本具体实施例中,净化作业区域200的深度为3~5米。
83.需要说明的是,本实用新型主要用于湖泊等相对封闭的环境治污使用,这是由于江河海的水流湍急,难于稳定装置,且江河海深度较大,不适用于本装置。
84.然后根据由人工预设的外环骨架110与内环骨架120的半径的差,以及外环骨架110的半径,计算并设定得到内环骨架120的半径。
85.然后设定内阻隔层150的高度为净化作业区域200的深度。
86.然后在铺底层上,以网格的形式均匀布设水质监测传感器组。
87.s300.将按照s200设定好的可移动的主动生态水质净化系统放置于净化作业区域200上,使可移动的主动生态水质净化系统与净化作业区域200在水体中的范围重合。
88.s400.在内环骨架120划定的水面上放置主动净化浮船300。
89.s500.激活所有的所述主动净化浮船(300),使每条所述主动净化浮船(300) 都按照人工预设的巡航路线自动巡航;具体来说,包含以下步骤:
90.s510.由总控单元600向水质监测传感器组发送传感器控制信号,激活并初始化所有的水质监测传感器500;
91.s520.由总控单元600向所有主动净化浮船300发送运动控制信号,激活并初始化所有的主动净化浮船300;主动净化浮船300的运行模式的初始值都为“巡航”。
92.s600.每个水质监测传感器500按人工预设的采集频率,采集水质数据信号,并传回总控单元600。
93.s700.根据水质数据信号,为每个水质监测传感器500所覆盖的水体的范围计算污染严重度;然后逐一将每个污染严重度与人工预设的污染度阈值对比,并根据对比结果做出如下操作:
94.如果污染严重度不低于污染度阈值,则将该污染严重度所对应的水质监测传感器500所对应的传感器编号放入由人工预设在总控单元600中的净化优先级队列中;然后执行s800。
95.如果污染严重度低于污染度阈值,则放弃该污染严重度。
96.s700中,污染严重度按式(1)表达:
97.pi=α1*ph α2*trans α3*cn α4*c
p
ꢀꢀꢀꢀꢀ
(1)
98.其中:pi为污染严重度;α1为酸碱度权重系数,由人工预设;α2为透明度权重系数,由人工预设;α3为氮质量浓度权重系数,由人工预设;α4为磷质量浓度权重系数,由人工预设;ph为酸碱度,由水质监测传感器500采集;trans 为透明度,由水质监测传感器500采集;cn为氮质量浓度,由水质监测传感器 500采集;c
p
为磷质量浓度,由水质监测传感器500采集。
99.需要说明的是:本具体实施例采用国际共识的湖泊水污染标准,具体来说:氮质量浓度为0.2mg/l、磷质量浓度0.02mg/l是水体富营养化的临界发生浓度;透明度不低于1m,酸碱度ph值范围为(6.5,9);将上述数据带入式(1),即可算出本具体实施例的污染度阈值;四个系数α1~α4可根据湖泊当地的实际情况由人工实时调整。
100.s800.将净化优先级队列中的传感器编号按对应的污染严重度的降序排列;然后由总控单元600查找当前运行模式为“巡航”,且距离在净化优先级队列上排第一的传感器
编号所对应的水质监测传感器500最近的一个主动净化浮船 300;然后向该主动净化浮船300发送运动控制信号,控制该主动净化浮船300 航向该水质监测传感器500所覆盖的水体的范围;然后将净化优先级队列中删除排第一的传感器编号复制进由人工预设在总控单元600中的净化进行时队列中;然后从净化优先级队列中删除排第一的传感器编号;然后将净化优先级队列中自排第二起的所有传感器编号的排序向前移动一位;
101.然后当该主动净化浮船300抵达该水质监测传感器500所覆盖的水体的范围后,即将运行模式置为“净化中”。
102.s900.判断净化优先级队列是否为空,并根据判断结果做出如下
103.如果净化优先级队列不为空,则返回并再次执行s800。
104.如果净化优先级队列为空,则执行s1000。
105.s1000.采集并刷新当前时刻的水质数据信号,然后逐一将根据净化进行时队列中每个传感器编号所对应的水质监测传感器500所传回的水质数据信号所计算出来的污染严重度进行对比,并根据对比结果做出如下操作:
106.如果污染严重度低于污染度阈值,则将该污染严重度所对应的水质监测传感器500所对应的传感器编号从净化优先级队列中删除;然后将与该水质监测传感器500所对应的主动净化浮船300的运行模式置为“巡航”;然后返回并再次执行s600。
107.如果污染严重度低于污染度阈值,则返回并再次执行s600。
108.在上述的详细描述中,各种特征一起组合在单个的实施方案中,以简化本公开。不应该将这种公开方法解释为反映了这样的意图,即,所要求保护的主题的实施方案需要比清楚地在每个权利要求中所陈述的特征更多的特征。相反,如所附的权利要求书所反映的那样,本实用新型处于比所公开的单个实施方案的全部特征少的状态。因此,所附的权利要求书特此清楚地被并入详细描述中,其中每项权利要求独自作为本实用新型单独的优选实施方案。
109.为使本领域内的任何技术人员能够实现或者使用本实用新型,上面对所公开实施例进行了描述。对于本领域技术人员来说;这些实施例的各种修改方式都是显而易见的,并且本文定义的一般原理也可以在不脱离本公开的精神和保护范围的基础上适用于其它实施例。因此,本公开并不限于本文给出的实施例,而是与本技术公开的原理和新颖性特征的最广范围相一致。
110.上文的描述包括一个或多个实施例的举例。当然,为了描述上述实施例而描述部件或方法的所有可能的结合是不可能的,但是本领域普通技术人员应该认识到,各个实施例可以做进一步的组合和排列。因此,本文中描述的实施例旨在涵盖落入所附权利要求书的保护范围内的所有这样的改变、修改和变型。此外,就说明书或权利要求书中使用的术语“包含”,该词的涵盖方式类似于术语“包括”,就如同“包括,”在权利要求中用作衔接词所解释的那样。此外,使用在权利要求书的说明书中的任何一个术语“或”是要表示“非排它性的或者”。
111.以上所述的具体实施方式,对本实用新型的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本实用新型的具体实施方式而已,并不用于限定本实用新型的保护范围,凡在本实用新型的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。