技术特征:
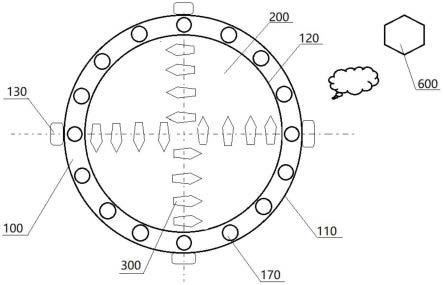
1.一种可移动的主动生态水质净化系统,其特征在于:包含以下组成部分:浮式围栏(100),用于在水体中划定净化作业区域(200);所述浮式围栏(100)为上端开口、下端封闭的竖直筒状结构,上端与水面高程相同,高度与所述净化作业区域(200)的高度相同;主动净化浮船(300),放置于所述浮式围栏(100)内,包含船体(310)和用于为所述主动净化浮船(300)的运动提供动力的动力驱动单元(320);所述船体(310)上种植有用于净化水质的水生植物(171);水质监测传感器组,包含多个水质监测传感器(500),布设于所述浮式围栏(100)内的底部上;总控单元(600),分别与所述主动净化浮船(300)和所述水质监测传感器(500)电信号耦接。2.根据权利要求1所述的可移动的主动生态水质净化系统,其特征在于:所述浮式围栏(100)包含轻质骨架、用于阻挡鱼类进入的阻隔层和铺底层(160);所述轻质骨架由长杆首尾相接构成,形成封闭的平面几何结构;所述阻隔层为竖直型圆筒,半径与所述轻质骨架的半径相同,高度与所述净化作业区域(200)的深度相同,上端与所述轻质骨架无缝连接,下端与所述铺底层(160)无缝连接。3.根据权利要求2所述的可移动的主动生态水质净化系统,其特征在于:所述轻质骨架包含两个细长型的柔性长杆首尾相接构成的圆形骨架;其中:两个所述圆形骨架中半径相对较长的一个为外环骨架(110),半径相对较短的一个为内环骨架(120);所述外环骨架(110)与所述内环骨架(120)的半径的差由人工预设;所述外环骨架(110)与所述内环骨架(120)以同心圆的形式嵌套设置;所述阻隔层包含外阻隔层(140)和内阻隔层(150);所述外阻隔层(140)为由土工织物网围成的竖直型圆筒,半径与所述外环骨架(110)的半径相同,且上端与所述外环骨架(110)无缝连接,高度与所述净化作业区域(200)的深度相同;所述内阻隔层(150)为由土工织物网围成的竖直型圆筒,半径与所述内环骨架(120)的半径相同,且上端与所述内环骨架(120)无缝连接,高度与所述净化作业区域(200)的深度相同。4.根据权利要求3所述的可移动的主动生态水质净化系统,其特征在于:所述铺底层(160)为由土工织物网制成的圆形片状层结构,位于所述外环骨架(110)的正下方,半径与所述外环骨架(110)的半径相同;所述铺底层(160)外缘与所述外阻隔层(140)无缝连接;所述内阻隔层(150)与所述铺底层(160)无缝连接;所述水质监测传感器组以网格的形式,均匀布设在所述铺底层(160)上。5.根据权利要求1所述的可移动的主动生态水质净化系统,其特征在于:所述主动净化浮船(300)还包含用于为所述主动净化浮船(300)提供电力的供电单元和用于为所述主动净化浮船(300)与总控单元(600)提供通信连接的第一网络通信单元(330);其中:所述供电单元和所述第一网络通信单元(330)固定安装在所述船体(310)上;所述供电单元分别与所述动力驱动单元(320)、所述第一网络通信单元(330)电连接;所述动力驱动单元(320)与所述第一网络通信单元(330)电信号耦接;所述主动净化浮船(300)通过所述第一网络通信单元(330)向所述总控单元(600)发送运动状态信号,并接收来自所述总控单元(600)的用于控制所述主动净化浮船(300)的动作
的运动控制信号;所述运动状态信号包含船体航速、船体加速度、航向角、gps坐标、前方目标相对距离、前方目标相对速度、左侧目标相对距离、左侧目标相对速度、右侧目标相对距离、右侧目标相对速度、后方目标相对距离和后方目标相对速度。6.根据权利要求5所述的可移动的主动生态水质净化系统,其特征在于:所述主动净化浮船(300)还包含固定安装在所述船体(310)上的,用于为所述动力驱动单元(320)提供来自所述总控单元(600)的所述运动控制信号,且用于向所述总控单元(600)发送所述运动状态信号的运动控制单元;所述动力驱动单元(320)与通过所述运动控制单元所述第一网络通信单元(330)电信号耦接;所述运动控制单元包含用于采集所述运动状态信号的船体运动状态传感器组;所述船体运动状态传感器组包含速度传感器、加速度传感器、航向角传感器、gps芯片、前避障雷达、侧避障雷达和后避障雷达;其中:所述速度传感器用于采集所述船体航速;所述加速度传感器用于采集所述船体加速度;所述航向角传感器用于采集所述航向角;所述gps芯片用于采集所述gps坐标;所述前避障雷达用于采集所述前方目标相对距离,所述前方目标相对速度;所述侧避障雷达用于采集所述左侧目标相对距离,所述左侧目标相对速度,所述右侧目标相对距离和所述右侧目标相对速度;所述后避障雷达用于采集所述后方目标相对距离和所述后方目标相对速度。7.根据权利要求4所述的可移动的主动生态水质净化系统,其特征在于:所述浮式围栏(100)还包含多个浮动种植槽(170);所述浮动种植槽(170)由可自主漂浮于水面的轻质材料制成,均匀设置在所述外环骨架(110)与所述内环骨架(120)之间的水面上,且通过绳索与所述外环骨架(110)与所述内环骨架(120)固定连接;所述浮动种植槽(170)上种植有用于净化水质的水生植物(171);所述水生植物(171)的根系(172)垂入水中。8.根据权利要求1~7任一所述的可移动的主动生态水质净化系统,其特征在于:所述水质监测传感器(500)包含用于为所述水质监测传感器(500)与所述总控单元(600)提供通信连接的第二网络通信单元;所述水质监测传感器(500)通过所述第二网络通信单元向所述总控单元(600)传回的用于表征水质监测指标的水质数据信号,并接收来自所述总控单元(600)的用于控制所述水质监测传感器组开启、关闭、初始化以及采集模式变更的传感器控制信号;所述水质监测指标包含酸碱度、透明度、氮质量浓度和磷质量浓度。
技术总结
本实用新型涉及可移动的主动生态水质净化系统,包含:水质维护体,用于划定净化作业区域,包含轻质骨架和浮块;主动净化浮船,包含船体和动力驱动单元;水质监测传感器组,布设于水质维护体的下方;总控单元,用于接收水质数据信号、运动状态信号,发送传感器控制信号、运动控制信号。本实用新型极大提高了净化效率;重复利用率高,降低了成本。降低了成本。降低了成本。
技术研发人员:杨香东 杨程锦 李瑞清 姚晓敏
受保护的技术使用者:湖北省水利水电规划勘测设计院
技术研发日:2021.12.16
技术公布日:2022/6/24
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。