1.本发明涉及发动机缸体加工的伸缩摆动缸领域,尤其涉及一种可检测伸缩摆动缸状态的护套连杆机构。
背景技术:
2.在缸体的生产线中,发动机缸体从辊道一端移动至加工位,在加工位时,需要对缸体的方向进行90度的调转,使其进入缸体加工中心中进行加工。现有技术中,为了减少人工,且为了保证设备的安全性和设备的集成度,缸体方向调转的主动设备通常采用伸缩摆动缸,可配合卡爪来将缸体抓起并旋转,配合自动化时,通常采用自带传感器的伸缩摆动缸,这种伸缩摆动缸,成本高,且后期维护起来需要供应商配合维修,非常的麻烦,且提高了整个项目的成本。cn107530848b公开了一种夹紧装置,该夹紧装置包括检测部分,所述检测部分用于检测所述夹紧臂的旋转位置;凸轮表面接近传感器用于检测所述凸轮表面上随着所述可旋转轴旋转而移位的位置。该专利可对夹紧臂旋转位置进行检测,但是伸缩摆动缸需要对旋转和伸缩的状态进行检测,并且,伸缩连杆必须在安全的位置先进行旋转再伸缩,保证安全性,而接近传感器价格低廉,为了在保证安全可靠可维护性的同时,且降低成本,如何在保证伸缩连杆安全旋转伸缩的情况下使用接近传感器来实现对伸缩摆动缸状态检测就显得十分重要了。
技术实现要素:
3.为解决上述问题,本发明提供一种可检测伸缩摆动缸状态的护套连杆机构,包括有伸缩护套和伸缩连杆,所述伸缩护套上设置有接近传感器一、接近传感器二和接近传感器三,接近传感器二和接近传感器三位于伸缩护套底部呈90
°
水平设置,接近传感器一位于伸缩护套顶部位于接近传感器二远离接近传感器三的一侧;所述伸缩连杆外壁有上下设置的腰型槽口和圆形槽口;三个接近传感器的检测距离为2mm,三个接近传感器内端检测部与伸缩连杆的距离小于2mm,三个接近传感器内端检测部与与腰型槽口和圆形槽口内端的距离大于2mm;所述伸缩连杆顶端位于伸缩护套内顶端时才可进行旋转。
4.进一步改进在于,所述伸缩连杆的顶端为方形部,主体部分为圆柱部;所述伸缩护套的内部顶端为圆形口,主体部分为圆柱孔,圆柱孔还设置有方形槽用于吻合方形部的限位通过,圆形口的直径大于方形槽的对角线长度。
5.进一步改进在于,所述方形部位于圆形口内时,圆柱部位于圆柱孔内,此时伸缩连杆方可旋转,由于伸缩连杆需伸缩,因此伸缩连杆只可90
°
旋转,方可进行旋转后再伸缩。
6.进一步改进在于,所述伸缩连杆底部为连接端来连接其他零件,伸缩护套周侧开设有三个螺纹孔,螺纹孔内用于安装接近传感器。
7.进一步改进在于,初始时,接近传感器二与腰型槽口和圆形槽口在一条与伸缩连杆同向的直线上,通过三个接近传感器信号的得失与否来判断伸缩连杆的上下位置和旋转
与否。
8.进一步改进在于,所述三个接近传感器信号的得失与否以1和0代表,0代表无信号,1代表有信号:当伸缩连杆处于下方且未旋转时,接近传感器一、接近传感器二和接近传感器三的信号分别为0 0 1;当伸缩连杆处于下方且向接近传感器三的方向旋转了90度时,接近传感器一、接近传感器二和接近传感器三的信号分别为0 1 0;当伸缩连杆处于上方且未旋转时,接近传感器一、接近传感器二和接近传感器三的信号分别为1 0 1;当伸缩连杆处于上方且向接近传感器三的方向旋转了90度时,接近传感器一、接近传感器二和接近传感器三的信号分别为1 1 0。
9.进一步改进在于,所述伸缩连杆处于下方且未旋转时,接近传感器一感应不到伸缩连杆,接近传感器二位于腰型槽口处,接近传感器三感应到伸缩连杆顶端;所述伸缩连杆处于下方且向接近传感器三的方向旋转了90度时,接近传感器一感应不到伸缩连杆,接近传感器三位于腰型槽口处,接近传感器二感应到伸缩连杆顶端。
10.进一步改进在于,所述伸缩连杆处于上方且未旋转时,接近传感器一感应到伸缩连杆顶端,接近传感器二位于圆形槽口处,接近传感器三感应到伸缩连杆底端;所述伸缩连杆处于上方且向接近传感器三的方向旋转了90度时,接近传感器一感应到伸缩连杆顶端,接近传感器三位于圆形槽口处,接近传感器二感应到伸缩连杆底端。
11.本发明的有益效果:一、本发明通过在伸缩护套上设置三个接近传感器来感应伸缩连杆,三个接近传感器的位置不同,其中两个位于底部水平90
°
设置,另一个位于顶部偏移设置,伸缩连杆通过上下设置的腰型槽口和圆形槽口来配合三个接近传感器的工作,接近传感器的检测距离为2mm,这样可根据接近传感器的检测信号来判断伸缩连杆与伸缩护套的相对位置是否旋转伸缩。
12.二、本发明伸缩连杆的方形部只有位于伸缩护套内的圆形口内时,才可进行旋转操作,且由于方形槽和方形部的吻合限位,伸缩连杆只可先进行旋转90
°
的操作,才可进行伸缩操作,不可在其余情况下进行旋转操作,这样可以保证伸缩摆动缸使用的安全性。
13.三、本发明接近传感器一、接近传感器二和接近传感器三的信号分别为0 0 1时伸缩连杆处于下方且未旋转,为0 1 0时伸缩连杆处于下方且旋转了90度,为1 0 1时伸缩连杆处于上方且未旋转,为1 1 0时伸缩连杆处于上方且旋转了90度,这样便可很好通过三个接近传感器的信号得失来识别伸缩连杆的工作状态,实现了低成本的同时保证了可靠性。本发明无论何时,都有一个接近传感器有信号,用于得知伸缩连杆在伸缩护套内,当三个传感器均无信号时,可知,此时的伸缩连杆掉出伸缩护套,设备报警,工作人员进行检修。
14.四、本发明伸缩连杆底部连接端来连接其他零件;伸缩护套仅仅只需要开设三个螺纹孔,便可实现对三个接近传感器的安装,这样操作成本低,使用方便。
附图说明
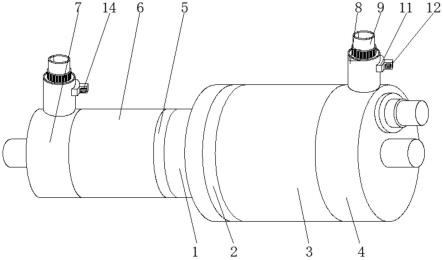
15.图1是本发明的整体示意图。
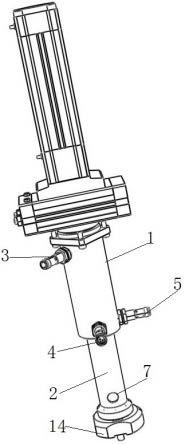
16.图2是本发明伸缩连杆的示意图。
17.图3是本发明伸缩护套的示意图。
18.图4是本发明伸缩护套内部示意图。
19.其中:1-伸缩护套,2-伸缩连杆,3-接近传感器一,4-接近传感器二,5-接近传感器三,6-腰型槽口,7-圆形槽口,8-螺纹孔,9-方形部,10-圆柱部,11-圆形口,12-圆柱孔,13-方形槽,14-连接端。
具体实施方式
20.为了加深对本发明的理解,下面将结合实施例对本发明作进一步详述,该实施例仅用于解释本发明,并不构成对本发明保护范围的限定。
21.如图1-4所示,本实施例提供一种可检测伸缩摆动缸状态的护套连杆机构,包括有伸缩护套1和伸缩连杆2,所述伸缩护套1上设置有接近传感器一3、接近传感器二4和接近传感器三5,接近传感器二4和接近传感器三5位于伸缩护套1底部呈90
°
水平设置,接近传感器一3位于伸缩护套1顶部位于接近传感器二4远离接近传感器三5的一侧;所述伸缩连杆2外壁有上下设置的腰型槽口6和圆形槽口7;三个接近传感器的检测距离为2mm,三个接近传感器内端检测部与伸缩连杆2的距离小于2mm,三个接近传感器内端检测部与与腰型槽口6和圆形槽口7内端的距离大于2mm。通过在伸缩护套1上设置三个接近传感器来感应伸缩连杆2,三个接近传感器的位置不同,其中两个位于底部水平90
°
设置,另一个位于顶部偏移设置,伸缩连杆2通过上下设置的腰型槽口6和圆形槽口7来配合三个接近传感器的工作,接近传感器的检测距离为2mm,这样可根据接近传感器的检测信号来判断伸缩连杆2与伸缩护套1的相对位置是否旋转伸缩。
22.所述伸缩连杆2顶端位于伸缩护套1内顶端时才可进行旋转。所述伸缩连杆2的顶端为方形部9,主体部分为圆柱部10;所述伸缩护套1的内部顶端为圆形口11,主体部分为圆柱孔12,圆柱孔12还设置有方形槽13用于吻合方形部9的限位通过,圆形口11的直径大于方形槽13的对角线长度。所述方形部9位于圆形口11内时,圆柱部10位于圆柱孔12内,此时伸缩连杆2方可旋转,由于伸缩连杆2需伸缩,因此伸缩连杆2只可90
°
旋转,方可进行旋转后再伸缩。这样伸缩连杆2的方形部9只有位于伸缩护套1内的圆形口11内时,才可进行旋转操作,且由于方形槽13和方形部9的吻合限位,伸缩连杆2只可先进行旋转90
°
的操作,才可进行伸缩操作,不可在其余情况下进行旋转操作,这样可以保证伸缩摆动缸使用的安全性。
23.所述伸缩连杆底部为连接端14来连接其他零件;伸缩护套1仅仅只需要开设三个螺纹孔8,便可实现对三个接近传感器的安装,这样操作成本低,使用方便。
24.本实施还提供一种检测方法,初始时,接近传感器二4与腰型槽口6和圆形槽口7在一条与伸缩连杆2同向的直线上,三个接近传感器信号的得失与否以1和0代表,0代表无信号,1代表有信号:接近传感器一3、接近传感器二4和接近传感器三5的信号分别为0 0 1时,当伸缩连杆2处于下方且未旋转时,此时接近传感器一3感应不到伸缩连杆2,接近传感器二4位于腰型槽口6处,接近传感器三5感应到伸缩连杆2顶端。
25.当接近传感器一3、接近传感器二4和接近传感器三5的信号分别为0 1 0时,伸缩连杆2的方形部9首先位于伸缩护套1的圆形口11内向接近传感器三5的方向旋转了90度,之后伸缩连杆2再向下伸处于下方;此时接近传感器一3感应不到伸缩连杆2,接近传感器三5
位于腰型槽口6处,接近传感器二4感应到伸缩连杆2顶端。
26.当接近传感器一3、接近传感器二4和接近传感器三5的信号分别为1 0 1时,伸缩连杆2处于上方且未旋转,此时接近传感器一3感应到伸缩连杆2顶端,接近传感器二4位于圆形槽口7处,接近传感器三5感应到伸缩连杆2底端。
27.当接近传感器一3、接近传感器二4和接近传感器三5的信号分别为1 1 0时,伸缩连杆2的方形部9首先位于伸缩护套1的圆形口11内向接近传感器三5的方向旋转了90度;此时接近传感器一3感应到伸缩连杆2顶端,接近传感器三5位于圆形槽口7处,接近传感器二4感应到伸缩连杆2底端。
28.这样便可很好通过三个接近传感器的信号得失来识别伸缩连杆2的工作状态,实现了低成本的同时保证了可靠性。本实施例无论何时,都有一个接近传感器有信号,用于得知伸缩连杆2在伸缩护套1内,当三个传感器均无信号时,可知,此时的伸缩连杆2掉出伸缩护套1,设备报警,工作人员进行检修。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。