1.本发明涉及农业机械设备技术领域,特别涉及一种植保无人机用喷幅可调的喷雾装置。
背景技术:
2.农业种植一般都需要定时喷洒农药等,目前基本上都是通过人工操作喷洒头进行农药喷洒,由于喷洒装置要不断地提供农药,因此一般都比较笨重,并且种植区域较大时,人工使用比较费力。
3.现有技术中,对大面积的种植区域进行农药喷洒时,常常通过无人机进行喷洒,但是,植保无人机喷洒装置通常设置有多个喷头,多个喷头布置方式为圆周式布置或直线型布置,都不能根据种植区域的宽度或者种植边缘的形状进行调节喷洒的宽度。
4.当喷洒区域的一个边缘为曲线时,如果控制现有的无人机的行驶路径为曲线,会导致有些植物重叠喷洒,而有些位置又不能喷洒到,喷洒得不均匀,喷洒效果不好。
技术实现要素:
5.本发明的目的是解决当喷洒区域的一个边缘为曲线时,如果控制现有的无人机的行驶路径为曲线,会导致有些植物重复喷洒,而有些位置又不能喷洒到的问题,提供一种植保无人机用喷幅可调的喷雾装置。
6.本发明提供的一种植保无人机用喷幅可调的喷雾装置,包括:
7.药箱,其上方设置有壳体;
8.第一管体,水平方向滑动地设置在壳体内,第一管体的底部设置有多个喷头;
9.直线位移组件,其定件与壳体连接,动件与第一管体连接,驱动第一管体水平移动;
10.泵体,设置在壳体内,其入水管延伸在药箱内,出水管与第一管体的一端通过伸缩管连接;
11.行走装置,与壳体连接。
12.优选的,直线位移组件包括第一齿条,与第一管体的一侧连接,壳体内架设有齿轮,齿轮与第一齿条相啮合,齿轮的轮轴连接有第一驱动电机,第一驱动电机连接有控制器,控制器连接有电源模块。
13.优选的,第一管体呈中心对称设置有两个。
14.优选的,第一齿条包括u型架,u型架的两端与第一管体连接,u型架上转动连接有齿,齿的背面连接有驱动其转动的驱动机构。
15.优选的,驱动机构包括第二齿条,滑动设置在第一管体靠近齿的一侧,第二齿条的一端设置有伸缩杆,伸缩杆与控制器电连接,伸缩杆的基座端与 u型架连接,伸缩端与第二齿条连接,齿的背面设置为半圆板,半圆板的周面上设置有与第二齿条相啮合的齿面。
16.优选的,喷头上设置有电磁阀,第一管体上设置有多个光感器,光感器与喷头的位
置相对应,光感器与电磁阀电连接。
17.优选的,第一管体的一侧设置有导向块,壳体的内壁设置有与导向块相匹配的水平方向的导向槽。
18.优选的,轮轴的下端连接有轴杆,轴杆的周面连接有搅拌杆,药箱的顶部与壳体的底部拆卸连接,药箱内设置有滤框。
19.优选的,行走装置包括机翼,与壳体的顶部连接,机翼的转轴连接有第二驱动电机,第二驱动电机与电源模块连接。
20.优选的,药箱的底部设置有喷淋管,喷淋管与药箱连。
21.与现有技术相比,本发明提供的一种植保无人机用喷幅可调的喷雾装置,其有益效果是:
22.1、本发明通过设置直线位移组件使第一水管移动,能够根据种植区域的边界线调整第一水管的伸出长度,使用时,无人机作直线行驶,就能均匀地将农药喷洒在植物上。
23.2、本发明通过在齿的背面设置驱动机构,将齿转平,断开与齿轮的啮合,实现一侧的第一水管长度调整,另外一侧保持一定的长度沿直线喷淋,喷洒下一行时,两侧都保持直线喷淋就可喷洒均匀,进一步提高喷洒效果。
24.3、本发明通过设置光感器与电磁阀连接,当第一水管伸出壳体时,光感器感应到光信号,控制器控制电磁阀开始喷淋,方便使用。
附图说明
25.图1为本发明的整体结构示意图;
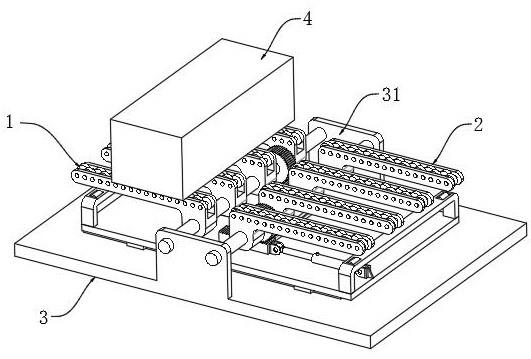
26.图2为本发明直线位移组件的示意图;
27.图3为本发明图2中b处得局部放大图。
28.附图标记说明:
29.1、药箱;2、水管;3、滤框;4、喷头;5、电磁阀;6、出水管;7、第一管体;8、导向块;9、泵体;10、光感器;11、第一驱动电机;12、轮轴; 13、齿轮;14、电源模块;15、壳体;16、机翼;17、第二驱动电机;18、轴杆;19、搅拌杆;20、喷淋管;22、第一齿条;23、伸缩杆;24、u型架;25、半圆板;26、齿;27、第二齿条。
具体实施方式
30.下面结合附图1和图3,对本发明的具体实施方式进行详细描述,但应当理解本发明的保护范围并不受具体实施方式的限制。
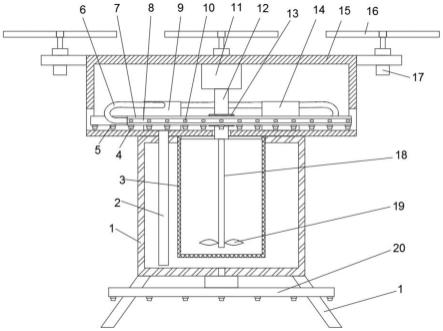
31.如图1和图3所示,本发明提供的一种植保无人机用喷幅可调的喷雾装置,包括药箱1、第一管体7、直线位移组件、泵体9、行走装置,药箱1上方设置有壳体15;第一管体7水平方向滑动地设置在壳体15内,第一管体7 的底部设置有多个喷头4;直线位移组件的定件与壳体15连接,动件与第一管体7连接,驱动第一管体7水平移动;泵体9,设置在壳体15内,其入水管2延伸在药箱1内,出水管6与第一管体7的一端通过伸缩管连接;行走装置与壳体15连接。
32.在使用时,通过直线位移组件驱动第一管体7水平向外移动,根据行走装置行走路径沿线侧边的形状,控制第一管体7的伸出长度,行走装置只需直线行走即可均匀地喷洒农
药。
33.进一步地,直线位移组件包括第一齿条22,与第一管体7的一侧连接,壳体15内架设有齿轮13,齿轮13与第一齿条22相啮合,齿轮13的轮轴12 连接有第一驱动电机11,第一驱动电机11连接有控制器,控制器连接有电源模块14,控制器中设置有无线模块,还包括无线手柄,与控制器信号连接。
34.使用者可以通过操作无线手柄来控制控制器,控制器控制第一驱动电机 11转动,带动齿轮13转动,齿轮13转动带动与其啮合的第一齿条22移动,
35.进一步地,第一管体7呈中心对称设置有两个。
36.进一步地,为了使一个齿轮13能分别驱动两个第一管体7移动,第一齿条22包括u型架24,u型架24的两端与第一管体7连接,u型架24上转动连接有齿26,齿26的背面连接有驱动其转动的驱动机构。
37.当需要驱动第一齿条22移动时,通过驱动机构驱动齿26转向与齿轮13 啮合的方向,当不需要驱动第一齿条22移动时,通过驱动机构驱动齿26转向与齿轮13不啮合的方向,即齿26朝向第一齿条22的长度方向。
38.进一步地,驱动机构包括第二齿条27,滑动设置在第一管体7靠近齿26 的一侧,第二齿条27的一端设置有伸缩杆23,伸缩杆23与控制器电连接,伸缩杆23的基座端与u型架24连接,伸缩端与第二齿条27连接,齿26的背面设置为半圆板25,半圆板25的周面上设置有与第二齿条27相啮合的齿面。
39.通过伸长伸缩杆23带动第二齿条27移动,带动与第二齿条27相啮合的齿面转动,从而使齿26转动方向。
40.进一步地,喷头4上设置有电磁阀5,第一管体7上设置有多个光感器 10,光感器10与喷头4的位置相对应,光感器10与控制器、电磁阀5电连接。
41.第一管体7移动至壳体15外时,光感器10检测到光信号,将光信号传递至控制器,控制器接收到光信号后控制对应的电磁阀5打开。
42.进一步地,第一管体7的一侧设置有导向块8,壳体15的内壁设置有与导向块8相匹配的水平方向的导向槽,导向块8滑动设置在导向槽中。
43.进一步地,轮轴12的下端连接有轴杆18,轴杆18的周面连接有搅拌杆 19,药箱1的顶部与壳体15的底部拆卸连接,药箱1内设置有滤框3。
44.植保无人机所用药剂一般为高浓度乳剂或粉剂,现有的系统一般采用回水搅拌,搅拌效果不理想导致沉积或喷头堵塞,本发明中的搅拌轴杆18与轮轴12相连,利用第一驱动电机11惯性驱动搅拌叶轮19,搅拌效果好,同时耗能少。
45.进一步地,行走装置包括机翼16,与壳体15的顶部连接,机翼16的转轴连接有第二驱动电机17,第二驱动电机17与电源模块14连接。
46.进一步地,为了避免药箱1底部的植物喷洒不到农药的情况,喷雾系统实行喷杆分段控制,药箱1的底部设置有喷淋管20,喷淋管20与药箱1连通,为固定喷雾段,对称的第一管体7可根据喷辐要求两端伸出喷头4,实现喷幅可调。
47.喷头4根据需要设置为一定的喷射角度,保证可调喷副第一管体7内喷雾不重叠、不干涉、不漏喷。
48.使用方法及工作原理
49.本发明提供地一种植保无人机用喷幅可调的喷雾装置,在使用时,首先将农药加入药箱1中,启动第一驱动电机11对农药进行搅拌,一边通过启动第二驱动电机17带动机翼16转动将喷洒装置升起至一定的高度并向前移动,伸长伸缩杆23将齿26转动至与齿轮13相啮合的角度,齿轮13驱动第一管体 7向外移动,一侧移动到合适的距离后将伸缩杆23缩短将齿26转动至与齿轮 13不啮合的角度,同时启动泵体9,另外一个通过操作无线手柄来控制控制器,调节第一管体7的伸出长度,第一管体7伸出的部分上光感器10检测到光信号后将光信号传递至控制器,控制器接收到光信号后将对应的电磁阀5 打开开始喷洒农药,检测不到光信号的光感器处对应的电磁阀5处于关闭状态,方便根据种植区域的边界线调整喷洒的宽度,避免喷洒区域重叠或者漏喷。
50.综上所述,本发明通过设置直线位移组件使第一水管移动,能够根据种植区域的边界线调整第一水管的伸出长度,使用时,无人机作直线行驶,就能均匀地将农药喷洒在植物上,通过在齿的背面设置驱动机构,将齿转平,断开与齿轮的连接,实现一侧的第一水管长度调整,另外一侧保持一定的长度沿直线喷淋,喷洒下一行时,两侧都保持直线喷淋就可喷洒均匀,进一步提高喷洒效果。
51.以上公开的仅为本发明的较佳的具体实施例,但是,本发明实施例并非局限于此,任何本领域的技术人员能思之的变化都应落入本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。