1.本发明涉及半导体集成电路领域,特别涉及一种去除掩模版(mask)上污染颗粒(particle)的装置。本发明还涉及一种去除掩模版上污染颗粒的方法。
背景技术:
2.半导体制造的一系列工艺中,光刻是集成电路制造中的一道关键工艺。光刻是利用光化学反应,通过晶圆表面涂底胶、旋涂光刻胶、软烘、对准、曝光、后烘、显影、硬烘、检测等工序将事先制备在掩模版上的图形转移到光刻胶膜上,使后续的选择性刻蚀和离子注入成为可能。而掩模版作为光刻曝光工序中不可或缺的一部分,对光刻胶膜上图形的形成起到至关重要的作用。一旦有外来颗粒掉落在掩模版上便有可能对光刻曝光成像产生影响,因此,保证掩模版的清洁度尤为重要。
3.在现有工艺技术中,对于掩模版上掉落的外来污染颗粒会优先采用自动吹扫机对污染颗粒进行去除,但自动吹扫机的能力有限,一旦遇到自动吹扫无法去除的污染颗粒,就需要工程师进行手动开盒,使用氮气枪或无尘棉签对污染颗粒进行去除。如图1所示,是现有去除掩模版上污染颗粒的装置的外部结构示意图;装置包括手动开盒器100和光源101。工程师在打开光源101的条件下对放置在手动开盒器100中的掩模版进行寻找和清除。手动开盒器100为开放式结构;开放式结构会使掩模版直接暴露于外界环境中,且无法准确定位出污染颗粒的具体位置,工程师只能依据掩模版颗粒检测机给出的坐标在大概位置进行寻找,在长时间寻找和去除污染颗粒的过程中掩模版便存在二次污染的风险。
技术实现要素:
4.本发明所要解决的技术问题是提供一种去除掩模版上污染颗粒的装置,能对掩模版上的污染颗粒进行快速定位,从而能对掩模版上的污染颗粒进行准确和快速的清除,提高清除污染颗粒的效率,还能避免二次污染以及降低掩模版多次开盒处理和返厂送洗的概率。
5.为解决上述技术问题,本发明提供的去除掩模版上污染颗粒的装置中设置有照明灯组;所述照明灯组包括一个网格型光源的散光灯和一个聚光灯。
6.所述散光灯开启后,所述散光灯的网格型光源照射到掩模版上并将所述掩模版划分成多个第一网格,通过所述第一网格实现对所述掩模版上的污染颗粒的粗定位。
7.所述聚光灯开启后用于照射所述粗定位对应的所述第一网格并实现对所述污染颗粒进行精定位,通过所述精定位实现对所述污染颗粒的快速去除。
8.进一步的改进是,所述粗定位中利用掩模版颗粒探测机对所述掩模版进行检测得到的污染颗粒分布图上污染颗粒坐标,以增加所述粗定位速度。
9.进一步的改进是,将所述污染颗粒分布图划分成多个第二网格,所述第二网格和所述第一网格一一对应,通过所述污染颗粒的坐标得到所述第二网格的位置以及通过所述第二网格的位置映射得到所述第一网格的位置。
10.进一步的改进是,所述装置还包括四周带有透明玻璃箱体的手动开盒器,用于在去除所述污染颗粒时放置所述掩模版。
11.进一步的改进是,所述手动开盒器的所述透明玻璃箱体为封闭式结构。
12.进一步的改进是,所述透明玻璃箱体的至少一个侧面设置有手套,所述手套和所述透明玻璃箱体的对应侧面相连接并用于实现对所述透明玻璃箱体内所述掩模版进行操作。
13.进一步的改进是,所述装置还包括吹气枪或无尘棉签,用于完成所述精定位的所述污染颗粒进行去除。
14.进一步的改进是,所述吹气枪为氮气枪。
15.进一步的改进是,在所述透明玻璃箱体的底部设置有具有抽气功能的排气孔,所述排气孔用于提供从所述透明玻璃箱体的内部到外部环境的单向排气功能。
16.进一步的改进是,所述聚光灯的照射范围为1至2个所述第一网格。
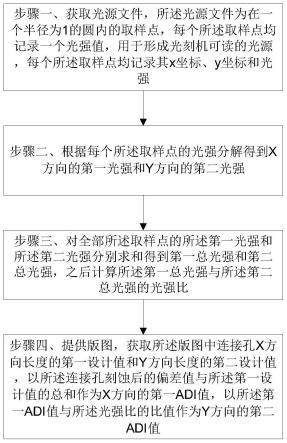
17.为解决上述技术问题,本发明提供的去除掩模版上污染颗粒的方法包括如下步骤:
18.步骤一、将掩模版放置在去除掩模版上污染颗粒的装置中;所述装置中设置有照明灯组;所述照明灯组包括一个网格型光源的散光灯和一个聚光灯。
19.步骤二、开启所述散光灯将网格型光源照射到掩模版上并将所述掩模版划分成多个第一网格,通过所述第一网格实现对所述掩模版上的所述污染颗粒的粗定位。
20.步骤三、开启所述聚光灯照射所述粗定位对应的所述第一网格并实现对所述污染颗粒进行精定位。
21.步骤四、根据所述精定位实现对所述污染颗粒的快速去除。
22.进一步的改进是,步骤二之前还包括:
23.采用掩模版颗粒探测机对所述掩模版进行检测得到的污染颗粒分布图;
24.步骤二中,所述粗定位中利用所述污染颗粒分布图上的污染颗粒坐标来增加所述粗定位速度。
25.进一步的改进是,在步骤二之前,还包括将所述污染颗粒分布图划分成多个第二网格,所述第二网格和所述第一网格一一对应;步骤二中,通过所述污染颗粒的坐标得到所述第二网格的位置以及通过所述第二网格的位置映射得到所述第一网格的位置。
26.进一步的改进是,所述装置还包括四周带有透明玻璃箱体的手动开盒器,用于在去除所述污染颗粒时放置所述掩模版。
27.进一步的改进是,所述手动开盒器的所述透明玻璃箱体为封闭式结构。
28.进一步的改进是,所述透明玻璃箱体的至少一个侧面设置有手套,所述手套和所述透明玻璃箱体的对应侧面相连接并用于实现对所述透明玻璃箱体内所述掩模版进行操作。
29.进一步的改进是,所述装置还包括吹气枪或无尘棉签,用于完成所述精定位的所述污染颗粒进行去除。
30.进一步的改进是,所述吹气枪为氮气枪。
31.进一步的改进是,在所述透明玻璃箱体的底部设置有具有抽气功能的排气孔,所述排气孔用于提供从所述透明玻璃箱体的内部到外部环境的单向排气功能。
32.进一步的改进是,所述聚光灯的照射范围为1至2个所述第一网格。
33.本发明对去除掩模版上污染颗粒的装置的照明灯组进行了特别设置,将照明灯组设置为具有定位功能的散光灯和聚光灯,利用散光灯的网格型光源能对掩模版进行网格划分并形成多个第一网格,通过第一网格能快速实现污染颗粒的粗定位;而聚光灯则能对污染颗粒所在的第一网格进行照射从而能快速实现污染颗粒的精定位,所以本发明能对掩模版上的污染颗粒进行快速定位,从而能对掩模版上的污染颗粒进行准确和快速的清除,提高清除污染颗粒的效率。
34.另外,本发明通过对污染颗粒清除效率的提高能缩短清除时间,能降低掩模版二次污染的概率;本发明进一步将手动开盒器用透明玻璃箱体封闭并结合具有单向排气功能的排气孔的设置,则能避免二次污染。
35.由于本发明能有效去除掩模版上的污染颗粒且能避免二次污染,故本发明能降低掩模版多次开盒处理和返厂送洗的概率。
附图说明
36.下面结合附图和具体实施方式对本发明作进一步详细的说明:
37.图1是现有去除掩模版上污染颗粒的装置的外部结构示意图;
38.图2是本发明实施例去除掩模版上污染颗粒的装置的外部结构示意图;
39.图3是本发明实施例的散光灯的网格型光源对应掩模版划分形成的第一网格图;
40.图4是本发明实施例对污染颗粒分布图划分形成的第二网格图;
41.图5是本发明实施例去除掩模版上污染颗粒的装置在去除污染颗粒时内部结构示意图;
42.图6是本发明实施例去除掩模版上污染颗粒的方法的流程图。
具体实施方式
43.如图2所示,是本发明实施例去除掩模版208上污染颗粒207的装置的外部结构示意图;如图3所示,是本发明实施例的散光灯201的网格型光源对应掩模版208划分形成的第一网格图;如图4所示,是本发明实施例对污染颗粒分布图划分形成的第二网格图;如图5所示,是本发明实施例去除掩模版208上污染颗粒207的装置在去除污染颗粒207时内部结构示意图;本发明实施例去除掩模版208上污染颗粒207的装置中设置有照明灯组;所述照明灯组包括一个网格型光源的散光灯201和一个聚光灯202。
44.所述散光灯201开启后,所述散光灯201的网格型光源照射到掩模版208上并将所述掩模版208划分成多个第一网格,通过所述第一网格实现对所述掩模版208上的污染颗粒207的粗定位。所述掩模版208请参考图5所示。所述第一网格请参考图3所示,图3的第一网格图204中的各网格为所述第一网格。
45.本发明实施例中,所述粗定位中利用掩模版颗粒探测机对所述掩模版208进行检测得到的污染颗粒分布图上污染颗粒207坐标,以增加所述粗定位速度。
46.如图4所示,将所述污染颗粒分布图划分成多个第二网格。图4中的第二网格图205中的各网格为所述第二网格,所述第二网格通过对所述污染颗粒分布图中的坐标206进行划分形成。所述第二网格和所述第一网格一一对应,如所述第一网格图204和所述第二网格
图205中的零点都对应于所述掩模版208的左下角。所述第一网格也称为掩模版网格,所述第二网格也称为坐标系网格。
47.由于所述污染颗粒分布图对应于一个图片如照片,所述第一网格图204则是对实际的所述掩模版208进行划分形成,故先通过所述污染颗粒分布图确定所述污染颗粒207在所述第二网格图205中的所述第二网格的位置,再通过所述第二网格和所述第一网格的映射关系得到所述第一网格的位置,即实现对所述掩模版208的污染颗粒207的粗定位。如图4中的所述污染颗粒207的坐标为(95,35),在所述第二网格图205中位于(7,3)处的所述第二网格中;映射到所述第一网格图204中则为位置(7,3)处的所述第一网格。找到位置(7,3)处的所述第一网格就实现了所述粗定位。位置(7,3)为网格位置,如7为横坐标上第7个网格,3位纵坐标上第3个网格。
48.如图5所示,所述聚光灯202开启后用于照射所述粗定位对应的所述第一网格并实现对所述污染颗粒207进行精定位,通过所述精定位实现对所述污染颗粒207的快速去除。
49.本发明实施例中,所述聚光灯202的照射范围为1至2个所述第一网格。所以,通过所述聚光灯202能直接照射所述粗定位所确定的所述第一网格,如图3中位置(7,3)处的所述第二网格。这样就能快速找到所述污染颗粒207。和现有方法中,需要在整片掩模版上全面寻找较小的污染颗粒相比,本发明实施例能快速且准确的定位所述污染颗粒207。
50.如图2所示,本发明实施例中,所述装置还包括四周带有透明玻璃箱体的手动开盒器200,用于在去除所述污染颗粒207时放置所述掩模版208。
51.较佳为,所述手动开盒器200的所述透明玻璃箱体为封闭式结构。
52.所述透明玻璃箱体的至少一个侧面设置有手套203,所述手套203和所述透明玻璃箱体的对应侧面相连接并用于实现对所述透明玻璃箱体内所述掩模版208进行操作。
53.所述装置还吹气枪或无尘棉签,用于完成所述精定位的所述污染颗粒207进行去除。所述吹气枪为氮气枪。
54.如图5所示,在所述透明玻璃箱体的底部设置有具有抽气功能的排气孔209,所述排气孔209用于提供从所述透明玻璃箱体的内部到外部环境的单向排气功能,单向排气如箭头线210所示。
55.本发明实施例对去除掩模版208上污染颗粒207的装置的照明灯组进行了特别设置,将照明灯组设置为具有定位功能的散光灯201和聚光灯202,利用散光灯201的网格型光源能对掩模版208进行网格划分并形成多个第一网格,通过第一网格能快速实现污染颗粒207的粗定位;而聚光灯202则能对污染颗粒207所在的第一网格进行照射从而能快速实现污染颗粒207的精定位,所以本发明实施例能对掩模版208上的污染颗粒207进行快速定位,从而能对掩模版208上的污染颗粒207进行准确和快速的清除,提高清除污染颗粒207的效率。
56.另外,本发明实施例通过对污染颗粒207清除效率的提高能缩短清除时间,能降低掩模版208二次污染的概率;本发明实施例进一步将手动开盒器200用透明玻璃箱体封闭并结合具有单向排气功能的排气孔209的设置,则能避免二次污染。
57.由于本发明实施例能有效去除掩模版208上的污染颗粒207且能避免二次污染,故本发明实施例能降低掩模版208多次开盒处理和返厂送洗的概率。
58.如图6所示,是本发明实施例去除掩模版上污染颗粒的方法的流程图;本发明实施
例去除掩模版208上污染颗粒207的方法包括如下步骤:
59.步骤一、将掩模版208放置在去除掩模版208上污染颗粒207的装置中;所述装置中设置有照明灯组;所述照明灯组包括一个网格型光源的散光灯201和一个聚光灯202。
60.本发明实施例方法中,所述装置还包括四周带有透明玻璃箱体的手动开盒器200,用于在去除所述污染颗粒207时放置所述掩模版208。
61.所述手动开盒器200的所述透明玻璃箱体为封闭式结构。
62.所述透明玻璃箱体的至少一个侧面设置有手套203,所述手套203和所述透明玻璃箱体的对应侧面相连接并用于实现对所述透明玻璃箱体内所述掩模版208进行操作。
63.所述装置还吹气枪或无尘棉签,用于完成所述精定位的所述污染颗粒207进行去除。
64.所述吹气枪为氮气枪。在所述透明玻璃箱体的底部设置有具有抽气功能的排气孔209,所述排气孔209用于提供从所述透明玻璃箱体的内部到外部环境的单向排气功能。
65.本发明实施例方法中,在进行后续步骤一之前,包括:
66.采用掩模版颗粒探测机对所述掩模版208进行检测得到的污染颗粒分布图。该步骤对应于图6中的步骤s101,即:使用掩模版颗粒探测机对外来颗粒进行检测,记录颗粒坐标。所述污染颗粒分布图是二维图,故能实现对所述污染颗粒207进行定位。
67.之后所述污染颗粒分布图划分成多个第二网格。该步骤对应于图6中的步骤s102,即:通过坐标系对颗粒坐标进行网格区域换算。换算后即可得到图4所示的所述第二网格图205。
68.所述第二网格图205中的第二网格和后续的第一网格图204中的第一网格一一对应。还包括利用所述第二网格和所述第一网格的一一对应关系,换算得到所述污染颗粒207在所述第一网格图204中的所述第一网格的位置,即对应于图6中的步骤s103,根据坐标系网格与装置光源所形成的网格的对应关系,对颗粒位置进行区域换算。其中坐标系网格即为所述第二网格,装置光源所形成的网格为所述第一网格。例如:图4中的所述污染颗粒207对应的所述第二网格的位置为(7,3);在对应的所述第一网格在所述第一网格图204中的位置也为(7,3)。位置(7,3)为网格位置,如7为横坐标上第7个网格,3位纵坐标上第3个网格。
69.步骤二、开启所述散光灯201将网格型光源照射到掩模版208上并将所述掩模版208划分成多个第一网格,通过所述第一网格实现对所述掩模版208上的所述污染颗粒207的粗定位。
70.步骤二对应于图6中的步骤s104,即:使用网格型光源的散光灯对掩模版进行网格划分,并确定颗粒所在网格位置。
71.所述第一网格图204是在所述散射光201照射后才形成,在所述散射光201开启后,就能在所述第一网格图204中很快找到位置(7,3)处的所述第一网格,实现所述粗定位。所以,本发明实施例方法中,所述粗定位中利用了所述污染颗粒分布图上的污染颗粒207坐标来增加所述粗定位速度。
72.通常,在将所述掩模版208放置到所述装置中之前,还需要利用所述吹气枪如氮气枪进行预清洁,所述预清洁采用的氮气为高纯氮气,同时开启抽气功能,清楚装置内原有颗粒。
73.步骤三、开启所述聚光灯202照射所述粗定位对应的所述第一网格并实现对所述
污染颗粒207进行精定位。
74.步骤三对应于图6中的步骤s105,即:使用聚光灯顶点观察污染颗粒。
75.本发明实施例方法中,所述聚光灯202的照射范围为1至2个所述第一网格。所以,通过所述聚光灯202能直接照射所述粗定位所确定的所述第一网格,如图3中位置(7,3)处的所述第二网格。这样就能快速找到所述污染颗粒207。
76.步骤四、根据所述精定位实现对所述污染颗粒207的快速去除。
77.本发明实施例方法中,步骤四采用图6中的步骤s106,即:开启排气孔的抽气功能,使用氮气枪或无尘棉签对污染颗粒进行手动去除。
78.之后,还需重复间颗粒检测。包括:
79.进行步骤s107,即:对掩模版进行颗粒检测。该步骤和步骤s101相同。
80.进行步骤s108,即:颗粒检测结果是否符合要求。步骤s108为一个判断步骤。如果不符合则返回到步骤s102。
81.如果步骤s108的判断结果为符合,则进行步骤s109,即掩模版正常使用。
82.以上通过具体实施例对本发明进行了详细的说明,但这些并非构成对本发明的限制。在不脱离本发明原理的情况下,本领域的技术人员还可做出许多变形和改进,这些也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。