技术特征:
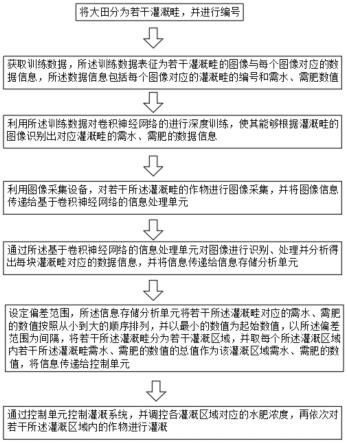
1.一种基于卷积神经网络的大田水肥智能控制方法,其特征在于,包括以下步骤:将大田分为若干灌溉畦,并进行编号;获取训练数据,所述训练数据表征为若干灌溉畦的图像与每个图像对应的数据信息,所述数据信息包括每个图像对应的灌溉畦的编号和需水、需肥数值;利用所述训练数据对卷积神经网络的进行深度训练,使其能够根据灌溉畦的图像识别出对应灌溉畦的需水、需肥的数据信息;利用图像采集设备,对若干所述灌溉畦的作物进行图像采集,并将图像信息传递给基于卷积神经网络的信息处理单元;通过所述基于卷积神经网络的信息处理单元对图像进行识别、处理并分析得出每块灌溉畦对应的数据信息,并将信息传递给信息存储分析单元;设定偏差范围,所述信息存储分析单元将若干所述灌溉畦对应的需水、需肥的数值按照从小到大的顺序排列,并以最小的数值为起始数值,以所述偏差范围为间隔,将若干所述灌溉畦分为若干灌溉区域,并取每个所述灌溉区域内若干所述灌溉畦需水、需肥的数值的平均值作为该灌溉区域内每个所述灌溉畦需水、需肥的数值,将信息传递给控制单元;通过控制单元控制灌溉系统,并调控各灌溉区域对应的水肥浓度,再依次对若干所述灌溉区域内的作物进行灌溉。2.一种基于卷积神经网络的大田水肥智能控制系统,其特征在于,包括:若干标记组件(20),分别设在若干灌溉畦(10)内,每个所述标记组件(20)上均设有编号,以分别对若干所述灌溉畦(10)进行标号;若干边界组件(30),分别设在每个所述灌溉畦(10)的四角,用来标记每个所述灌溉畦(10)的范围;图像信息采集设备,用来采集若干所述灌溉畦(10)内的图像信息;基于卷积神经网络的信息处理模块,用来接收所述图像信息采集设备传递的图像信息,通过识别所述图像信息中的所述标记组件(20)和所述边界组件(30)对应的像素信息而识别出每个所述灌溉畦(10)对应的所述编号,同时,对所述图像信息中其他像素信息进行识别,得出每个所述编号对应的所述灌溉畦(10)的需水、需肥的数值;并将若干所述灌溉畦(10)对应的需水、需肥的数值按照从小到大的顺序排列,以最小的数值为起始数值,以预设的偏差范围为间隔,将若干所述灌溉畦(10)分为若干灌溉区域,并取每个所述灌溉区域内若干所述灌溉畦(10)需水、需肥的数值的平均值作为该灌溉区域内每个所述灌溉畦(10)需水、需肥的数值;灌溉系统,用来对若干所述灌溉畦(10)进行灌溉;控制模块,与所述图像信息采集设备、所述基于卷积神经网络的信息处理模块和所述灌溉系统电性连接,用来控制所述图像信息采集设备进行图像信息采集、接收所述基于卷积神经网络的信息处理模块传递的信息、依据所述基于卷积神经网络的信息处理模块传递的信息调节所述灌溉系统输出的水肥浓度,并控制所述灌溉系统依次对若干所述灌溉区域进行灌溉。3.如权利要求2所述的基于卷积神经网络的大田水肥智能控制系统,其特征在于,所述标记组件(20)包括标杆(21)和编号牌(22),所述标杆(21)插设在对应所述灌溉畦(10)内,所述编号牌(22)与所述标杆(21)连接,所述标号牌上设有所述编号。
4.如权利要求3所述的基于卷积神经网络的大田水肥智能控制系统,其特征在于,所述边界组件(30)包括边界杆(31)和边界牌(32),所述边界杆(31)一端插入土壤中,另一端与所述边界牌(32)连接。5.如权利要求2所述的基于卷积神经网络的大田水肥智能控制系统,其特征在于,所述图像信息采集设备包括拍摄无人机、摄像设备和信号收发模块,所述摄像设备和所述信号接收发射模块均与所述拍摄无人机连接。6.如权利要求2所述的基于卷积神经网络的大田水肥智能控制系统,其特征在于,所述灌溉系统包括:水肥箱(41)、水泵(42)、混合组件、物料泵(43)、肥料浓度检测仪(46)、输送泵(47)、若干流量传感器(48)、若干电控节流阀(49)、若干电磁阀(50)、主管道(51)和若干分管道(52),所述水泵(42)的进水口用来与水源连通;所述物料泵(43)的进料口与所述水肥箱(41)连通;所述混合组件与所述水泵(42)的出水口和所述物料泵(43)的出料口连接,以将水肥稀释;所述肥料浓度检测仪(46)与所述混合组件连接,用来检测稀释后水肥的浓度;若干所述流量传感器(48)分别设在所述水泵(42)与所述混合组件和所述物料泵(43)与所述混合组件之间,以分别检测所述水泵(42)和所述物料泵(43)的总流量;若干所述电控节流阀(49)分别与所述水泵(42)的出水口和所述物料泵(43)的出料口连接;所述输送泵(47)的进料端与所述混合组件连通,出料端与所述主管道(51)连通,若干所述分管道(52)均一端与所述主管道(51)连通,另一端分别设在若干所述灌溉畦(10)内,若干电磁阀(50)分别设在若干所述分管道(52)上,以控制所述分管道(52)的通断。7.如权利要求6所述的基于卷积神经网络的大田水肥智能控制系统,其特征在于,所述混合组件包括混合罐(44)和循环泵(45),所述混合罐(44)与所述水泵(42)的出水口和所述物料泵(43)的出料口连接,并与所述输送泵(47)的进料端连接,所述循环泵(45)的进料端与所述混合罐(44)的下部连接,所述循环泵(45)的出料端与所述混合罐(44)的上部连接。8.如权利要求6所述的基于卷积神经网络的大田水肥智能控制系统,其特征在于,所述控制模块分别与所述水泵(42)、所述物料泵(43)、所述若干流量传感器(48)、若干所述电控节流阀(49)、所述输送泵(47)、若干所述电磁阀(50)和所述肥料浓度检测仪(46)电性连接,以根据所述信息处理模块传递的信息,结合肥料浓度检测仪(46)控制若干电控节流阀(49)调节混合组件输出的稀释后的水肥的浓度、结合若干流量传感器(48)控制若干所述电控节流阀(49)控制输出的水量和水肥量、并通过控制若干所述电磁阀(50)的开闭来控制所述灌溉系统灌溉的区域。9.如权利要求6所述的基于卷积神经网络的大田水肥智能控制系统,其特征在于,所述灌溉系统还包括若干支架(53)和若干灌溉喷枪,若干所述支架(53)分别夹设在若干所述灌溉畦(10)的中间,所述灌溉喷枪与所述支架(53)连接,所述灌溉喷枪的进水端与所述分管道(52)连接。10.如权利要求9所述的基于卷积神经网络的大田水肥智能控制系统,其特征在于,每个所述灌溉喷枪均包括安装座(61)、进水管(62)、壳体(63)、喷管(64)、喷嘴(65)、摇摆架(66)、扭簧(67)和散射器(68);所述安装座(61)与所述支架(53)连接,所述进水管(62)穿过所述安装座(61),并与所述安装座(61)连接,所述进水管(62)下端与所述分管道(52)连接,所述进水管(62)的上端沿周设有出水口(621),所述出水口(621)在竖直方向上的宽度沿周呈周期性变化,每九十度角为一个变化周期;所述壳体(63)套设在所述进水管(62)上,与所
述进水管(62)转动密封连接;所述喷管(64)一端与所述喷嘴(65)连接,另一端与所述壳体(63)连接并连通,所述喷管(64)与所述壳体(63)的连通口与所述进水管(62)的出水口(621)对齐;所述喷嘴(65)的出水端设有所述散射器(68),以将喷射出的水流打散为水幕;所述摇摆架(66)与所述壳体(63)转动连接,所述摇摆架(66)前端设有挡水板(661),所述摇摆架(66)与所述壳体(63)之间设有所述扭簧(67),以使所述喷管(64)在喷水过程中,绕所述进水管(62)周圈转动;所述输送泵(47)为恒压泵,所述喷管(64)绕所述进水管(62)周圈转动的过程中,所述进水管(62)的所述出水口(621)与所述喷管(64)对齐的面积呈周期性变化,进而使所述喷嘴(65)喷出的水的距离呈周期性变化。
技术总结
本发明提供了一种基于卷积神经网络的大田水肥智能控制方法,所述基于卷积神经网络的大田水肥智能控制方法包括以下步骤:将大田分为若干灌溉畦,并进行编号;对卷积神经网络的进行深度训练,使其能够根据灌溉畦的图像识别出对应灌溉畦的需水、需肥的数据信息;利用图像采集设备,对若干灌溉畦的作物进行图像采集;通过基于卷积神经网络的信息处理单元对图像进行识别、处理并分析得出每块灌溉畦对应的数据信息;通过控制单元控制灌溉系统依次对若干灌溉区域内的作物进行灌溉;还提供了一种基于卷积神经网络的大田水肥智能控制系统,能够根据灌溉畦的图像识别出对应灌溉畦的需水、需肥的数据信息,并对若干灌溉区域内的作物进行灌溉。灌溉。灌溉。
技术研发人员:邢素丽 高朋博 贾良良 黄少辉 杨军方 杨云马 杨文方 李会龙 郭丽
受保护的技术使用者:河北省农林科学院农业资源环境研究所
技术研发日:2022.04.08
技术公布日:2022/6/21
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。