1.本发明涉及制造玻璃比色皿的技术。
背景技术:
2.存在制造玻璃比色皿的技术。例如,专利文献1中公开了下述的技术:其是在玻璃有底管的内部插入模具而对该玻璃有底管进行加热成型的玻璃比色皿的制造方法,其包括将加热成型后的玻璃有底管缓慢冷却的工序,通过使模具的线性膨胀率大于玻璃有底管的线性膨胀率而在缓慢冷却工序中使玻璃有底管与模具相互脱离。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开2006-193375号公报
技术实现要素:
6.发明所要解决的课题
7.在专利文献1的技术中存在下述情况:发生了收缩变形的玻璃有底管与作为内形模的模具过度密合,在缓慢冷却工序中在使玻璃有底管与模具相互脱离时,玻璃有底管发生破损。
8.因此,本发明的目的在于,在玻璃比色皿的制造中容易从变形后的有底管中取出内形模。
9.用于解决课题的手段
10.本发明提供一种用于制造有底的以硼硅酸玻璃或石英玻璃作为材料的方形比色皿的制造装置,该方形比色皿安装在基于测光的分析装置中,收纳被检试样的一端面开口,其中,该制造装置具备:管;连结部,其与上述管连通,连结于在内部收纳有内形模的状态的以硼硅酸玻璃或石英玻璃作为材料的有底管的开口部;注入机构,其藉由上述管和上述连结部将促进上述有底管从上述内形模脱模的特定种类的气体注入到上述有底管的内部;加热部,其对于在内部收纳有上述内形模且在内部注入有上述特定种类的气体的状态的上述有底管进行加热;以及排出机构,其从在内部收纳有上述内形模、在内部注入有上述特定种类的气体且被加热至特定温度的上述有底管的内部藉由上述管和上述连结部将气体排出到外部,使上述有底管的内部相对于大气压成为负压。
11.另外,可以具有自转机构,在上述加热部对上述有底管进行加热的期间,使上述连结部沿上述有底管的周向旋转。
12.另外,可以具备复数个上述连结部,上述自转机构具有:分别安装在复数个上述连结部的链轮;架设在复数个上述链轮上的驱动链;以及藉由上述驱动链使复数个上述链轮旋转的原动机。
13.另外,上述驱动链可以按照在从复数个上述链轮中的彼此相邻的2个上述链轮的旋转轴观察为相互不同的侧咬合在上述链轮上的方式交错地架设在复数个上述链轮上。
14.另外,上述自转机构可以以在特定范围内任意设定的旋转速度使上述有底管沿周向旋转。
15.另外,可以具备密封材料,将上述连结部与连结于上述连结部的上述有底管之间气密地密封,在从上述开口部将上述连结部插入到上述有底管的状态下保持上述连结部与上述有底管的连结。
16.另外,可以具备机器人,通过移动上述有底管将上述连结部插入到上述有底管中而使上述有底管连结于上述连结部,通过移动上述有底管从上述有底管拔出上述连结部而解除上述有底管对于上述连结部的连结。
17.另外,可以具备改变上述连结部与上述加热部的距离的致动器。
18.另外,可以具备在圆周上排列配置的复数个上述连结部。
19.另外,可以具备公转机构,使复数个上述连结部绕着通过上述圆的中心点的轴旋转。
20.另外,可以具备在相互平行的复数条直线上排列配置的复数个上述连结部。
21.另外,可以具备移动机构,对于上述复数条直线中的各条直线,使在该直线上排列配置的复数个上述连结部在该直线的延伸方向上移动。
22.另外,可以具备与复数个上述连结部分别相对应地设置的复数个上述加热部,对于与相对应的上述连结部连结的上述有底管进行加热。
23.本发明提供一种用于制造有底的以硼硅酸玻璃或石英玻璃作为材料的方形比色皿的制造方法,该方形比色皿安装在基于测光的分析装置中,收纳被检试样的一端面开口,其中,该制造方法具备:从以硼硅酸玻璃或石英玻璃作为材料的有底管的开口部将内形模投入到上述有底管的内部的处理;从在内部收纳有上述内形模的状态的上述有底管的开口部将促进上述有底管从上述内形模脱模的特定种类的气体注入到上述有底管的内部的处理;对于在内部收纳有上述内形模且在内部注入有上述特定种类的气体的状态的上述有底管进行加热的处理;以及从在内部收纳有上述内形模、在内部注入有上述特定种类的气体且被加热至特定温度的上述有底管的内部将气体排出到外部而使上述有底管的内部相对于大气压成为负压的处理。
24.另外,在投入上述内形模的处理中,可以将在表面未进行脱模剂的涂布或脱模膜的贴附的上述内形模投入到上述有底管的内部。
25.另外,可以具备在投入到上述有底管的内部之前的上述内形模的表面形成不是dnf(alcrn)覆膜的金属覆膜的处理,在投入上述内形模的处理中,将在表面形成有不是dnf(alcrn)覆膜的金属覆膜的状态的上述内形模投入到上述有底管的内部。
26.另外,可以具备在对上述有底管进行加热的期间使上述有底管沿周向旋转的处理。
27.发明效果
28.根据本发明,在玻璃比色皿的制造中能够从变形后的有底管中容易地取出内形模。
附图说明
29.图1是示出实施例的玻璃比色皿制造装置的外观的图。
30.图2是示出有底管的图。
31.图3是详细地示出气体通过的部分的图。
32.图4是示出玻璃比色皿制造装置的框图的图。
33.图5是示出上下移动的臂部的图。
34.图6是放大示出旋转机构的图。
35.图7是用于说明使旋转机构旋转的构造的图。
36.图8是示出有底管与旋转机构的连结方法的图。
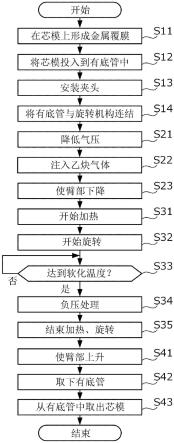
37.图9是示出玻璃比色皿的制造方法中的动作过程的一例的图。
38.图10是示出变形例的复数个旋转机构的配置的一例的图。
39.图11是示出到对有底管进行加热为止的过程的一例的图。
具体实施方式
40.[1]实施例
[0041]
图1示出实施例的玻璃比色皿制造装置1的外观。玻璃比色皿制造装置1是用于制造玻璃比色皿的装置,是本发明的“制造装置”的一例。玻璃比色皿是收纳被检试样、安装在基于测光的分析装置中的比色皿。玻璃比色皿形成为一端面开口的有底且为方形的形状。玻璃比色皿以硼硅酸玻璃或石英玻璃作为材料而形成。
[0042]
玻璃比色皿制造装置1具备中央支承部10、复数个臂部20、以及复数个炉30。臂部20和炉30为相同数目,在图1中,为了容易对图进行观察,仅图示出复数个臂部20中的一个臂部20。中央支承部10是对复数个臂部20进行支承的部分。臂部20支承作为玻璃比色皿的材料的有底管2。
[0043]
炉30具有圆柱状的加热空间31,在加热空间31中对利用臂部20支承的有底管2进行加热。炉30是本发明的“加热部”的一例。有底管2通过利用炉30进行加热而发生软化,被加工成方形。
[0044]
图2示出有底管2。有底管2形成为一端面开口的有底且为圆筒形的形状,以硼硅酸玻璃或石英玻璃作为材料而形成。
[0045]
有底管2被臂部20支承时,如图2的(a)、(b)所示,在有底管2的内部收纳方形的芯模3。芯模3是本发明的“内形模”的一例。对有底管2施加将利用炉30进行加热而软化的有底管2按压至芯模3的方向的力,由此使有底管2变形为与芯模3密合的形状,被加工成方形。关于该施加力的方法在下文详细说明。
[0046]
图1所示的臂部20具备臂21、旋转机构22、以及通气用管23。臂21是一端由中央支承部10支承、在另一端侧设置有旋转机构22的棒状部件。旋转机构22是利用未图示的驱动手段(关于驱动手段在下文叙述)进行旋转的机构。在玻璃比色皿制造装置1中,复数个旋转机构22如图1所示在圆周上排列配置。
[0047]
旋转机构22的铅直下方侧与在内部收纳有芯模3的状态的有底管2的开口部连结,通过机构自身旋转而使有底管2旋转。旋转机构22是本发明的“连结部”的一例。炉30与复数个旋转机构22分别相对应地设置,对于与相对应的旋转机构22连结的有底管2进行加热。通气用管23藉由旋转机构22与有底管2相连,是从有底管2的内部排出的气体以及注入到有底管2的内部的气体所通过的管。通气用管23是本发明的“管”的一例。
[0048]
图3详细示出了气体所通过的部分。图3的(a)中示出了从水平方向观察的旋转机构22的周边的截面。图3的(b)中示出了从铅直上方观察的旋转机构22的周边的截面。通气用管23与l字型的连接管25连接。连接管25与设置于臂21的通气部26连接。设置于旋转机构22的通气部222面向通气部26。
[0049]
通气部222与设置于旋转机构22的内部的通气部223连接。通气部26、222、223均是为了使气体通过而设置的孔。在旋转机构22中,如图3的(b)所示,按照无论在哪个方向停止均与通气部26连接的方式设置有复数个通气部222。通气部223与连结于旋转机构22的有底管2的内部空间4连接。
[0050]
这样,旋转机构22的通气部222藉由连接管25和通气部26与通气用管23的内部空间相连。另外,旋转机构22的通气部223与有底管2的内部空间4相连。即,旋转机构22藉由连接管25和通气部26与通气用管23连通且与有底管2的内部空间4直接连通。
[0051]
由此,有底管2的内部空间4的气体藉由通气用管23、连接管25、通气部26和旋转机构22而排出或注入。
[0052]
图4示出玻璃比色皿制造装置1的框图。玻璃比色皿制造装置1具备:真空泵11、第1阀12、储气瓶13、第2阀14、流量计15、压力计16、温度计17、控制装置18、旋转机构22、通气用管23、以及第3阀24。
[0053]
真空泵11是将空气排出到大气中而形成接近真空的状态的泵。真空泵11藉由第1阀12与通气用管23连接。第1阀12对于真空泵11与通气用管23之间是否可通气进行切换。第1阀12打开时,能够通气,第1阀12关闭时,不能通气(第2阀14和第3阀24也是同样的)。
[0054]
储气瓶13是填充有气体的储瓶,将所填充的气体排出到外部。在储气瓶13中填充有乙炔气体,该乙炔气体是促进与芯模3密合的有底管2从芯模3脱模的特定种类的气体。储气瓶13藉由第2阀14和流量计15与通气用管23连接。第2阀14对于储气瓶13与通气用管23之间是否可通气进行切换。流量计15是对于从储气瓶13中排出的气体的量进行测定的计量器。
[0055]
压力计16与通气用管23的内部空间连接,对于该内部空间的气压进行测定。第3阀24对于通气用管23与大气之间是否可通气进行切换。温度计17例如是以非接触方式对物体的温度进行测定的机器,对有底管2的温度进行测定。控制装置18对于玻璃比色皿制造装置1所具备的各部分(除了图4所示的各部以外,还包括旋转机构22和炉30等)的动作进行控制。
[0056]
控制装置18是具备处理器、内存和存储器等的计算机。处理器例如由包含与周边装置的接口、控制装置、运算装置、电阻器等的中央处理装置(cpu:central processing unit,中央处理单元)构成,在内存和存储器中读取程序等执行各种处理。控制装置18执行预先设定的自律性控制(自动控制)、以及针对未图示的控件(可以为物理性控件、虚拟控件中的任一者)的与作业员的操作相应的控制(手动控制)中的任一种控制。
[0057]
在如上述那样有底管2与旋转机构22连结的状态下,有底管2的内部空间藉由旋转机构22等与通气用管23的内部空间连通。因此,控制装置18以关闭第2阀14和第3阀24且打开第1阀12的状态使真空泵11运转时,通气用管23和有底管2的内部空间的气压降低。控制装置18基于压力计16的测定值将有底管2的内部空间的气压调整为特定的气压。
[0058]
另外,在有底管2的内部空间的气压降低的状态下,控制装置18在第1阀12和第3阀
24关闭且第2阀14打开的状态时,将填充在储气瓶13中的乙炔气体注入到有底管2的内部空间中。控制装置18基于流量计15的测定值将特定量的乙炔气体注入到有底管2的内部空间。另外,控制装置18通过打开第3阀24而将注入到有底管2的内部空间的乙炔气体排出到大气中,使有底管2的内部空间与外气压相等。
[0059]
这样,藉由通气用管23和旋转机构22向有底管2的内部注入乙炔气体的第2阀14和储气瓶13是本发明的“注入机构”的一例。在内部收纳有芯模3且在内部注入有乙炔气体的状态的有底管2如上所述利用炉30进行加热。为了将有底管2插入到炉30的加热空间31中,使臂部20沿上下移动。
[0060]
图5示出了上下移动的臂部20。支承臂部20的中央支承部10具备使臂部20上下移动的升降机构19。升降机构19具有螺线管、伺服电动机或气缸等部件,通过使臂部20沿铅直方向的上下移动而改变旋转机构22与炉30的距离。升降机构19是本发明的“致动器”的一例。升降机构19在本实施例中改变旋转机构22与炉30的铅直方向的距离。
[0061]
首先,升降机构19以臂部20移动至铅直上方的状态进行有底管2与旋转机构22的连结。在有底管2与旋转机构22连结的状态下,升降机构19使臂部20向铅直下方移动,将有底管2插入到炉30的加热空间31中。这样,升降机构19改变旋转机构22与炉30的距离,由此与该距离不变的情况相比,能够容易地进行有底管2的装卸。在炉30对有底管2进行加热的期间,旋转机构22沿有底管2的周向旋转。
[0062]
图6放大示出了旋转机构22。旋转机构22具备链轮部221、通气部222、前端部224、以及密封部225。链轮部221是设置于旋转机构22的铅直上方侧(在设置时成为铅直上方的一侧)的圆盘状的齿轮。旋转机构22通过向链轮部221传递驱动力而进行旋转。参照图7对于向链轮部221传递驱动力而使旋转机构22旋转的构造进行说明。
[0063]
图7是用于说明使旋转机构22旋转的构造的图。图7中示出了使复数个旋转机构22旋转的链机构40。链机构40是本发明的“自转机构”的一例。图7中,为了使说明容易理解,减少使链机构40旋转的旋转机构22的数目而示意性地示出。链机构40具备链41、驱动齿轮42、以及电动机43。
[0064]
链41架设在分别安装于复数个旋转机构22的链轮部221。链41是本发明的“驱动链”的一例。驱动齿轮42是咬合在1个链轮部221的圆盘状的齿轮,通过由电动机43传递的驱动力进行旋转。电动机43产生藉由驱动齿轮42和链41使复数个链轮部221旋转的原动力。电动机43是本发明的“原动机”的一例。
[0065]
如图7所示,链41按照在从复数个链轮部221中的彼此相邻的2个链轮部221的旋转轴观察为相互不同的侧咬合在链轮部221上的方式交错地架设在复数个链轮部221上。需要说明的是,驱动齿轮42可以不直接咬合在链轮部221上而咬合在与链轮部221同轴地设置的齿轮上。
[0066]
另外,也可以使用带来代替链41。这种情况下,在各旋转机构22设置有带轮部(架设带而传递动力的部件)来代替链轮部221。通过图7所示的构成,例如与在复数个旋转机构22上分别设置原动机和齿轮等动力传递机构的情况相比,能够实现使复数个旋转机构22旋转的机构的小型化和节省空间化。
[0067]
另外,通过将链41如图7所示进行架设,例如与仅将链架设在从链轮部221的旋转轴观察的外侧的情况相比,能够使链不容易发生脱落。另外,通过如上所述在有底管2的加
热中使旋转机构22旋转,与旋转机构22连结的有底管2也旋转,与未进行这些旋转的情况相比,能够抑制从炉30施加至有底管2的热量的不均。
[0068]
图6所示的通气部222是将上述有底管2的内部空间与通气用管23的内部空间进行连接的通气用的孔。前端部224是设置于旋转机构22的铅直下方侧(在设置时为铅直下方的一侧)、且设置有与通气部222连通的孔的圆筒形的部分。有底管2与该前端部224连结。在前端部224的外周设置有密封部225。
[0069]
密封部225是用于在有底管2与旋转机构22连结时按照气体不会从有底管2的内部空间向外部漏出的方式进行隔断,并且使气体不会从有底管2的外部进入到内部空间中的部件。密封部225具有以橡胶等弹性部件作为材料形成的圆形环2251、2252、2253。在本实施例中,有底管2与旋转机构22的连结由作业员通过手工作业进行。
[0070]
图8示出有底管2与旋转机构22的连结方法。将有底管2与旋转机构22连结时,在有底管2的开口部5侧安装夹头50。如图6的(a)所示,夹头50安装于有底管2,是支承有底管2的部件。夹头50具有圆筒支承部51、以及把手部52。圆筒支承部51是与形成为圆筒形的有底管2接触并支承有底管2的部分。
[0071]
把手部52是在将有底管2相对于旋转机构22装卸时成为把手的部分。在本实施例中,有底管2的装卸由作业人员进行。作业员如图6的(b)所示把持安装于有底管2的夹头50的把手部52,如图6的(c)所示安装于旋转机构22的前端部224。密封部225均如图8的(d)所示与有底管2的内周面7密合,将旋转机构22与连接于旋转机构22的有底管2之间气密地密封。
[0072]
另外,密封部225中,圆形环2251、2252、2253与有底管2的内周面7密合而产生摩擦力,由此在将旋转机构22由开口部5插入到有底管2的状态下保持旋转机构22与有底管2的连结。密封部225是本发明的“密封材料”的一例。通过使用密封部225,能够仅通过拔插有底管2而进行气密的保持和连结的保持。
[0073]
在有底管2的开口部5侧形成有厚壁部6。如图6的(b)所示,圆筒支承部51形成为与厚壁部6密合的形式。因此,圆筒支承部51在连结有底管2、卸下有底管2时均与厚壁部6卡接,如图6的(c)和的(d)所示,能够将朝向使有底管2移动的方向的力施加至厚壁部6。其结果,例如与圆筒支承部51的内周面为单纯的圆筒内周面的情况相比,能够容易地进行有底管2的装卸。
[0074]
将有底管2安装于旋转机构22时,开始有底管2的加工。首先,如图4的说明中所述,通过真空泵11、储气瓶13、第1阀12、第2阀14和第3阀24的动作,将乙炔气体注入到有底管2的内部空间4中。另外,图5所示的升降机构19使臂部20下降,开始利用炉30对有底管2进行加热。
[0075]
将有底管2加热至有底管2发生软化的温度时,在第1阀12打开的状态下,真空泵11运转,使有底管2的内部空间4相对于大气压成为负压。这样,第1阀12和真空泵11从在内部收纳有芯模3、在内部注入有乙炔气体且被加热至软化温度的有底管2的内部藉由通气用管23和旋转机构22将气体排出到外部,使有底管2的内部相对于大气压成为负压。第1阀12和真空泵11是本发明的“排出机构”的一例。
[0076]
通过使内部空间4成为负压,有底管2被大气压按压至芯模3,变形成为玻璃比色皿的形状。当完成向玻璃比色皿的变形时,炉30结束加热,升降机构19使臂部20上升。并且,通
过将第3阀24打开,玻璃比色皿的内部空间与大气压成为一体,作业员容易将玻璃比色皿从旋转机构22卸下。
[0077]
在空气进入了内部空间4中的状态下进行变形时,与芯模3密合的有底管2会贴附于芯模3,有时难于取出芯模3。本实施例中,在变形前的有底管2的内部空间4中注入了乙炔气体,该乙炔气体是促进与芯模3密合的有底管2从芯模3脱模的特定种类的气体。由此,在玻璃比色皿的制造中,与未注入乙炔气体的情况相比,能够容易地从变形后的有底管2取出芯模3。
[0078]
对于玻璃比色皿制造装置1制造玻璃比色皿的制造方法进行说明。
[0079]
图9示出玻璃比色皿的制造方法中的动作过程的一例。首先,未图示的覆膜形成装置对于投入到有底管2的内部空间4之前的芯模3的表面进行形成金属覆膜的处理(步骤s11)。金属覆膜的形成是为了提高芯模3的硬度、耐磨耗性、耐腐蚀性、耐氧化性和耐热性等而进行的。
[0080]
接着,作业员进行将形成有金属覆膜的状态的芯模3从有底管2的开口部5投入到有底管2的内部空间4中的处理(步骤s12)。通常,为了在加工成玻璃比色皿后容易将芯模3从有底管2中取出,有时在芯模3的表面进行脱模剂的涂布或脱模膜的贴附。但是,在玻璃比色皿制造装置1中,注入促进脱模的乙炔气体。
[0081]
因此,在步骤s11中,将在表面未进行脱模剂的涂布或脱模膜的贴附的芯模3投入到有底管2的内部空间4中。在进行脱模剂的涂布或脱模膜的贴附时,需要进行从所制造的玻璃比色皿和芯模3除去脱模剂或脱模膜的清洗,但在本实施例中,通过使用乙炔气体,能够不需要进行这样的清洗。
[0082]
另外,在芯模3上形成dnf(alcrn)覆膜也能够促进脱模,但是该覆膜比金属覆膜的价格昂贵。本实施例中,在步骤s11中,覆膜形成装置在芯模3的表面形成不是dnf(alcrn)覆膜的金属覆膜。即,通过使用乙炔气体,能够选择金属覆膜,与形成dnf(alcrn)覆膜的情况相比,能够抑制成本。
[0083]
接下来,作业员在将图8所示的夹头50安装于投入了芯模3的有底管2(步骤s13)。接着,作业员把持夹头50的把手部52将有底管2与旋转机构22连结(步骤s14)。从步骤s11到s14是针对复数个旋转机构22分别进行的。加工对象的有底管2全部与旋转机构22连结时,接下来,图4所示的控制装置18对真空泵11等进行控制,进行降低通气用管23和有底管2的内部空间的气压的处理(步骤s21)。
[0084]
之后,控制装置18对储气瓶13等进行控制,进行藉由通气用管23向有底管2的内部空间4中注入乙炔气体的处理(步骤s22)。步骤s21和s22的处理是从在内部收纳有芯模3的状态的有底管2的开口部5向有底管2的内部注入乙炔气体的处理的一例。接着,控制装置18对图5所示的升降机构19进行控制,使臂部20下降(步骤s23)。
[0085]
接着,图1所示的控制装置18对炉30进行控制,开始进行插入到炉30的加热空间31中的有底管2的加热(步骤s31)。步骤s31的处理是对于在内部收纳有芯模3且在内部注入了乙炔气体的状态的有底管2进行加热的处理的一例。接着,控制装置18对旋转机构22等进行控制,开始进行与旋转机构22连结的有底管2的旋转(步骤s32)。步骤s32的处理是在对有底管2进行加热的期间使有底管2沿周向旋转的处理的一例。
[0086]
接着,图4所示的控制装置18判断温度计17所测定的有底管2的温度是否达到了软
化温度(步骤s33),重复进行步骤s33直至判断为达到了软化温度(是)为止。软化温度是作为个体的有底管2的流动性剧烈增加的温度。软化温度是本发明的“特定温度”的一例。控制装置18判断为达到了软化温度(是)时,对真空泵11等进行控制,进行使有底管2的内部空间相对于大气压为负压的处理(步骤s34)。
[0087]
步骤s34的处理是将气体从在内部收纳有芯模3、在内部注入了乙炔气体且被加热至软化温度的有底管2的内部排出到外部而使有底管2的内部相对于大气压成为负压的处理的一例。通过该处理,有底管2发生变形而被加工成方形。接下来,控制装置18结束利用炉30的加热和利用旋转机构22等的有底管2的旋转(步骤s35)。接着,控制装置18对升降机构19进行控制,使臂部20上升(步骤s41)。
[0088]
接着,作业员把持夹头50的把手部52,将有底管2从旋转机构22取下(步骤s42)。之后,作业员从有底管2取出芯模3(步骤s43)。由于乙炔气体促进脱模,因此容易取出芯模3。取出了芯模3的有底管2中,加入有芯模3的部分被加工成方形。将该加工成方形的部分以外切掉,则完成玻璃比色皿。以上为玻璃比色皿的制造方法。
[0089]
[2]变形例
[0090]
上述实施例只不过为本发明的一个实施例,可以如下进行变形。另外,上述实施例和以下所示的各变形例可以根据需要进行组合来实施。
[0091]
[2-1]自转机构
[0092]
实施例中,链机构40使复数个旋转机构22旋转,但也可以具备使复数个旋转机构22分别具有原动机等的自转机构。
[0093]
[2-2]旋转速度的调整
[0094]
图7所示的链机构40可以以在特定范围内任意设定的旋转速度使有底管2沿周向旋转。本变形例中,使用能够控制旋转速度的电动机作为电动机43。例如在将炉30延长进行使用时,有时会由于劣化等而产生发热量的不均。
[0095]
另外,有底管2被倾斜地安装于旋转机构22,与炉30的距离变得不均匀,加热的热量有时会产生偏差。任一情况均会成为有底管2的温度产生不均、在变形时产生应变的原因。这些情况下,有底管2的旋转速度越慢,进行不均匀加热的时间越增加,有底管2的温度不均越会增大。换言之,有底管2的旋转速度越加快,有底管2的温度不均越减小,因而优选。
[0096]
例如在有底管2产生温度不均的情况下,作业者操作控制装置18使旋转速度比之前高,由此与旋转速度不变的情况相比,能够减小有底管2的温度不均。另外,在复数个旋转机构22分别具备自转机构的情况下,可以仅提高产生有底管2的温度不均的炉30的旋转速度。
[0097]
[2-3]装卸用机器人
[0098]
实施例中,有底管2的装卸由作业员进行,但也可以由机器人进行该装卸。本变形例的玻璃比色皿制造装置1具备机器人,通过移动有底管2将旋转机构22插入到有底管2而使有底管2连结于旋转机构22,通过移动有底管2从有底管2拔出旋转机构22而解除有底管2对于旋转机构22的连结。
[0099]
上述机器人例如具有:能够夹持保持图8所示的夹头50的把手部52的保持机构、以及能够使保持机构上下移动的臂机构。机器人在由保持机构保持把手部52的状态下通过臂机构使保持机构上下移动,由此进行有底管2的连结和连结的解除。根据本变形例,与人工
进行有底管2的装卸的情况相比,能够减少玻璃比色皿制造时的人工工时。
[0100]
[2-4]公转机构
[0101]
实施例中,复数个旋转机构22在圆周上排列配置,但除了铅直方向的位置以外,各旋转机构22的位置是固定的。因此,作业员在进行有底管2的装卸作业时,需要绕着玻璃比色皿制造装置1移动。因此,本变形例中,中央支承部10使复数个旋转机构22绕着通过圆的中心点的轴旋转。本变形例的中央支承部10是本发明的“公转机构”的一例。
[0102]
中央支承部10具备可旋转地支承臂部20的旋转轴、以及利用控制装置18进行控制而使旋转轴旋转的原动机。控制装置18控制原动机使臂部20旋转,由此使复数个旋转机构22和与旋转机构22连结的有底管2绕轴旋转。由此,即使作业员不移动,也能够进行有底管2的装卸作业。
[0103]
[2-5]致动器
[0104]
实施例中,升降机构19使臂部20向铅直下方移动,由此成为有底管2被炉30加热的状态,但相反地,也可以通过利用升降机构19使臂部20向铅直上方移动而成为有底管2被炉30加热的状态。这种情况下,旋转机构22与实施例上下相反地设置,有底管2连结在旋转机构22的铅直上方侧。
[0105]
另外,也可以通过利用升降机构19使臂部20沿水平方向移动而成为有底管2被炉30加热的状态。这种情况下,旋转机构22和炉30与实施例相比倾斜90度进行设置,有底管2连结在旋转机构22的水平方向且为炉30侧的一端。在任一情况下,升降机构19均按照改变旋转机构22与炉30的距离的方式动作即可。
[0106]
[2-6]旋转机构的配置
[0107]
复数个旋转机构22的配置方法可以与实施例不同。例如,可以在圆周上排列配置比实施例更少的旋转机构22或比其更多的旋转机构22。另外,也可以使复数个旋转机构22在直线上排列配置。
[0108]
图10示出本变形例的复数个旋转机构的配置的一例。图10中示出了从铅直上方观察的复数个炉30a。复数个炉30a在相互平行的复数条直线上排列配置。在对有底管2进行加热时,将连结了有底管2的本变形例的旋转机构配置在各炉30a的铅直上方。即,本变形例的旋转机构在相互平行的复数条直线上排列配置。
[0109]
通过如图10那样进行配置,与如实施例那样在圆周上排列配置的情况相比,能够增多每单位面积所配置的有底管2的个数。需要说明的是,在如实施例那样在圆周上排列配置旋转机构22的情况下,与在直线上排列的情况相比,容易使从真空泵或储气瓶到连结于旋转机构的各有底管2的距离固定,其结果,容易使各有底管2的内部空间的气压固定一致。
[0110]
图11示出了到对有底管2进行加热为止的过程的一例。图11的(a)、(b)中示出了从铅直上方观察的臂部20a、以及复数个炉30a。另外,图11的(c)、(d)中示出了在水平方向观察的臂部20a、以及复数个炉30a。需要说明的是,图11中,为了容易对图进行观察,减少复数个炉30a的数目且仅示出1列。
[0111]
臂部20a具备:复数个臂21a、复数个旋转机构22a、轨道23a、以及移动机构24a。轨道23a是细长的板状部件,沿着其长度方向a1排列固定有复数个臂21a。各臂21a为细长的棒状部件,一个端部固定于轨道23a,在另一端部设置有旋转机构22a。
[0112]
复数个炉30a和复数个旋转机构22a均沿着长度方向a1以直线状排列配置。轨道
23a被升降机构19a支承为能够沿铅直方向移动。另外,轨道23a利用移动机构24a支承为能够沿长度方向a1移动。移动机构24a例如具有固定有轨道23a的环形带、以及使带旋转的驱动机构,通过使带旋转,轨道23a沿长度方向a1移动。
[0113]
移动机构24a还设置有省略了图示的其他轨道23a。即,对于复数条直线中的各条直线,移动机构24a使在这些直线上排列配置的复数个旋转机构22a在该直线的延伸方向(相当于长度方向a1)上移动。移动机构24a是本发明的“移动机构”的一例。移动机构24a与升降机构19a同样地利用图4所示的控制装置18对动作进行控制。
[0114]
首先,如图11的(a)所示,控制装置18使轨道23a移动至全部旋转机构22a位于沿长度方向a1排列的复数个炉30a的端部的外侧的位置。在图11的(a)的状态下,在全部旋转机构22a的铅直下方存在没有炉30a的空间,因此与旋转机构22a处于炉30a的铅直上方的情况相比,能够容易地进行有底管2的连结作业。
[0115]
加工对象的有底管2全部连结时,如图11的(b)所示,控制装置18使轨道23a移动至各炉30a位于复数个旋转机构22a各自的铅直下方的位置。并且,如图11的(c)、(d)所示,控制装置18使轨道23a移动至有底管2被插入到炉30a的加热空间31a的位置。在图11的(d)所示的状态下,复数个炉30a将有底管2加热,与实施例同样地对有底管2进行加工。
[0116]
需要说明的是,在实施例和本变形例中,玻璃比色皿制造装置均具备复数个旋转机构、以及与旋转机构相同数目的炉,但并不限于此。例如,玻璃比色皿制造装置可以具备能够对所有与复数个旋转机构分别连结的有底管2进行加热的1个大的炉(将其称为“一体型的加热部”),也可以仅具备1个旋转机构和1个炉。
[0117]
但是,在炉与复数个旋转机构分别对应地设置的情况下,例如即使在炉发生故障时,与一体型的加热部相比,也能够容易地进行更换。另外,在由于生产数管理等理由而使有底管2并非与复数个旋转机构全部而仅与一部分连结的情况下,能够仅使所需要的炉运转。
[0118]
[2-7]发明的范畴
[0119]
本发明除了玻璃比色皿制造装置1那样的制造装置以外,还可以看作是使用该制造装置按图9所示的过程制造玻璃比色皿的制造方法。另外,本发明也可以看作用于使控制装置18那样的对信息处理装置进行控制的计算机发挥功能的程序。该程序可以以存储其的光盘等记录介质的形态进行提供,也可以以经由互联网等网络下载到计算机中并可将其安装利用等的形态进行提供。
[0120]
符号说明
[0121]1…
玻璃比色皿制造装置(制造装置)、2
…
有底管、3
…
芯模(内形模)、10
…
中央支承部、11
…
真空泵(排出机构)、12
…
第1阀(排出机构)、13
…
储气瓶(注入机构)、14
…
第2阀(注入机构)、15
…
流量计、16
…
压力计、17
…
温度计、18
…
控制装置、19
…
升降机构、20
…
臂部、21
…
臂、22
…
旋转机构(连结部)、23
…
通气用管(管)、24
…
第3阀、25
…
连接管、26
…
通气部、30
…
炉(加热部)、31
…
加热空间、40
…
链机构(自转机构)、41
…
链(驱动链)、42
…
驱动齿轮、43
…
电动机(原动机)、50
…
夹头、51
…
圆筒支承部、52
…
把手部、221
…
链轮部(链轮)、222、223
…
通气部、224
…
前端部、225
…
密封部(密封材料)。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。