1.本发明属于多光谱测量技术领域,具体地说,是涉及一种利用光谱分析技术对海水溢油进行分类检测的装置和方法。
背景技术:
2.随着海上石油勘探、开采事业的兴起,海上石油泄漏和油船漏油事故屡有发生,使大量石油和各种类型的油制品流入海洋,对海洋环境造成了严重污染。由于开采原油和成品油监管往往属于不同的执法部门,在海水中出现油类污染物时,首先需要判断出溢油的类型,然后根据溢油类型确定相关的执法部门进行监督管理和溯源。因此,对海水溢油进行分类检测,对于某些执法部门来说是必须的。同时,对海水溢油进行快速、准确地分类,也有利于海上油污清除工作的高效开展。
3.现阶段,针对石油及其各种油制品的检测和分类,最常见的方法有液相色谱法和气相色谱法,这些方法需要对海水中的溢油进行取样后,送到实验室,利用实验室中的大型设备完成油品的分类检测工作,不仅耗费时间长,成本高,而且时效性差,导致后期追溯困难。
技术实现要素:
4.本发明的目的在于提供一种利用光谱分析技术对海水溢油进行分类检测的装置和方法,通过将荧光光谱和拉曼光谱相结合,以提高海水溢油分类检测的效率和准确度。
5.为达到上述技术目的,本发明采用以下技术方案予以实现:在一个方面,本发明提出了一种利用光谱分析技术对海水溢油进行分类检测的方法,包括:采集含有溢油的海水的荧光光谱数据;对荧光光谱数据进行光谱平滑去噪声处理,得到平滑荧光光谱图;对所述平滑荧光光谱图进行基线校正,去除本地基线;对去除本地基线后的荧光光谱图进行峰值拾取,拾取出所有特征峰的光谱位置和强度;将拾取出的特征峰的光谱位置和强度,与汽油和柴油的荧光光谱图谱进行比对,识别出所述溢油是否为汽油或柴油;在所述溢油不是汽油和柴油时,采集所述含有溢油的海水的拉曼光谱数据;对拉曼光谱数据进行光谱平滑去噪声处理,得到平滑拉曼光谱图;对所述平滑拉曼光谱图进行基线校正,去除本地基线;对去除本地基线后的拉曼光谱图进行峰值拾取,拾取出所有特征峰的光谱位置和强度;将拾取出的特征峰的光谱位置和强度,与原油及成品油多环芳烃种类特征的拉曼光谱图谱进行比对,识别出溢油中所含的多环芳烃种类;
根据溢油中所含的多环芳烃种类及各类多环芳烃的含量占比,识别出溢油的类型。
6.在另一个方面,本发明提出了一种利用光谱分析技术对海水溢油进行分类检测的装置,包括:自动环流平台,其用于采集含有溢油的海水,并将所述海水与用于表面增强拉曼光谱检测所需的纳米材料进行恒温混合,将海水进样和恒温混合液体分时送入比色皿,以分别进行荧光光谱探测和拉曼光谱探测;光学检测系统,其利用可激发荧光信号的激光光源照射比色皿中的海水进样,以激发出荧光信号并进行收集,生成荧光光谱数据;或者利用可激发拉曼光信号的激光光源照射比色皿中的恒温混合液体,以激发出拉曼光信号并进行收集,生成拉曼光谱数据;自动控制单元,其接收所述荧光光谱数据和拉曼光谱数据,并执行以下海水溢油分类检测过程:采集含有溢油的海水的荧光光谱数据;对荧光光谱数据进行光谱平滑去噪声处理,得到平滑荧光光谱图;对所述平滑荧光光谱图进行基线校正,去除本地基线;对去除本地基线后的荧光光谱图进行峰值拾取,拾取出所有特征峰的光谱位置和强度;将拾取出的特征峰的光谱位置和强度,与汽油和柴油的荧光光谱图谱进行比对,识别出所述溢油是否为汽油或柴油;在所述溢油不是汽油和柴油时,采集所述含有溢油的海水的拉曼光谱数据;对拉曼光谱数据进行光谱平滑去噪声处理,得到平滑拉曼光谱图;对所述平滑拉曼光谱图进行基线校正,去除本地基线;对去除本地基线后的拉曼光谱图进行峰值拾取,拾取出所有特征峰的光谱位置和强度;将拾取出的特征峰的光谱位置和强度,与原油及成品油多环芳烃种类特征的拉曼光谱图谱进行比对,识别出溢油中所含的多环芳烃种类;根据溢油中所含的多环芳烃种类及各类多环芳烃的含量占比,识别出溢油的类型。
7.与现有技术相比,本发明的优点和积极效果主要体现在:本发明的海水溢油分类检测方法采用荧光光谱识别汽油和柴油,采用拉曼光谱识别原油、燃料油和轻质油,并采用差分拉曼的方式消除了拉曼光谱中的荧光干扰,通过对荧光光谱和拉曼光谱进行平滑去噪、基线校正和峰值拾取,实现了特征峰位置和强度的准确拾取,解决了因特征峰位置估计不准确所导致的油品识别易出现错误的问题,提高了海水溢油分类检测的准确性。
8.本发明的海水溢油分类检测装置在自动环流平台的基础上,将荧光光谱探测和拉曼光谱探测相结合,采用自动控制策略实现了拉曼光谱探测所需纳米材料和海水溢油的完全混合和恒温控制,并且实现了环流管路的自动清洗功能,由此可以自动完成从海水取样、混合、溢油激发、光信号采集、光谱处理到溢油分类识别的全过程,不仅提高了溢油分类检测的速度和准确度,而且可以对海水实现原位检测,解决了溢油溯源困难的问题。
9.结合附图阅读本发明实施方式的详细描述后,本发明的其他特点和优点将变得更加清楚。
附图说明
10.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图。
11.图1是本发明所提出的海水溢油分类检测装置中的自动环流平台的一种实施例的整体架构图;图2是本发明所提出的海水溢油分类检测装置中的光学检测系统的一种实施例的整体架构图;图3是本发明所提出的海水溢油分类检测方法的一种实施例的处理流程图;图4是对原始荧光光谱数据进行平滑去噪声处理后得到的平滑荧光光谱图;图5是对图4所示的平滑荧光光谱图进行基线校正后得到的光谱图;图中,10、比色皿;11、第一三通阀;12、第二三通阀;13、第三三通阀;14、第四三通阀;15、恒温混合环流管;16、蠕动泵;21、荧光激光光源;22、第一准直透镜;23、第一窄带滤光片;24、第一汇聚透镜;25、第二准直透镜;26第一长波通滤光片;27、第二汇聚透镜;28、荧光探测器;31、差分拉曼激光器;32、第三准直透镜;33、短波通二向色镜;34、第二窄带滤光片;35、反射镜;38、第三窄带滤光片;36、第一长波通二向色镜;37、第三汇聚透镜;39、第二长波通二向色镜;40、第二长波通滤光片;41、第四汇聚透镜;42、拉曼探测器。
具体实施方式
12.下面结合附图对本发明的具体实施方式进行详细地描述。
13.需要说明的是,在本发明的描述中,术语“前”、“后”等指示方向或位置关系的术语是基于附图所示的方向或位置关系,这仅仅是为了便于描述,而不是指示或暗示所述装置或元件必须具有特定的方位、以特定的方位构造和操作,因此,不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”、“第四”仅用于描述目的,而不能理解为指示或暗示相对重要性。
14.此外,还需要说明的是,在本发明的描述中,除非另有明确的规定和限定,术语
ꢀ“
相连”、“连接”应做广义理解。例如,可以是固定连接,也可以是可拆卸连接或一体地连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域技术人员而言,可根据具体情况理解上述术语在本发明中的具体含义。
15.海上溢油的一个重要特征是事件发生突然,少量溢油无法快速、精准地被发现,导致后期追溯困难。基于此,本实施例设计了一种自动环流分析平台,并结合光谱学手段,实现溢油现场的无人值守、快速分析测定,为海上溢油事故的快速追溯和准确分类提供依据。
16.光谱分析技术可以对海水中的油类进行测量,但是,单一的光谱分析技术不能达到高灵敏度地准确分类测定。而海水溢油的一个重要特征是溢油中含有多种多环芳烃,多环芳烃具有荧光和拉曼特性。对于汽油和柴油而言,其所含有的多环芳烃的荧光特征峰区分明显,可以通过荧光光谱的特征峰的位置识别出溢油是汽油还是柴油。而对于原油、燃料
油、轻质油等,由于其所含有的某些多环芳烃的荧光特征峰会出现重合的情况,因此,仅利用荧光光谱是无法准确地区分开该类溢油的种类的。但是,这类溢油的多环芳烃的拉曼特征峰位置不同,因此,可以通过测定拉曼特征峰的峰位和强度来实现不同多环芳烃的定量和定性,进而识别出该类溢油的种类。
17.基于此,本实施例在自动环流分析平台上,将荧光光谱技术和拉曼光谱技术联合应用于溢油污染物的分类检测中,不仅能够节约人力,提高溢油分类检测的效率和准确度,而且可以弥补实验室方法和单一光谱分析方法的不足,成为一种快速检测环境中有机污染物的新方法。
18.由于在测定拉曼光谱时,通常会伴随有荧光干扰,影响拉曼测量结果的准确性,因此,本实施例采用差分拉曼光谱技术实现荧光干扰的去除,以完成拉曼光谱的精准测定。
19.基于上述设计思想,本实施例首先设计了一套海水溢油分类检测装置,以支持海水溢油的原位检测,具体包括自动环流平台、光学检测系统和自动控制单元等主要组成部分。
20.本实施例的自动环流平台所要完成的功能主要包括:(1)采集含有溢油的海水,可以现场原位采集,也可以在实验室采集运送回来的海水样品;(2)将采集到的海水送入比色皿,进行荧光光谱探测;(3)将采集到的海水与用于拉曼光谱检测所需的纳米材料(例如金纳米粒子的溶液)进行恒温混合,然后,将恒温混合液体送入比色皿,以进行拉曼光谱探测;(4)自动清洗环流管路和比色皿。
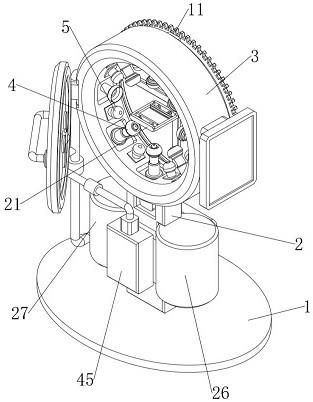
21.为实现上述功能,如图1所示,本实施例在自动环流平台中主要配置有四个三通阀11-14(分别定义为第一三通阀11、第二三通阀12、第三三通阀13、第四三通阀14)、一个恒温混合环流管15和一个蠕动泵16。
22.其中,第一三通阀11的第一选通口nc1用于进样拉曼光谱检测所需的纳米材料,第二选通口no1用于接入管道清洗液,公共口com1连接第二三通阀12的第一选通口nc2。
23.第二三通阀12的第二选通口no2连通第四三通阀14的第一选通口nc4,第二三通阀12的公共口com2连通恒温混合环流管15的入水口。
24.第三三通阀13的第一选通口nc3用于进样含有溢油的海水,第二选通口no3连通恒温混合环流管15的出水口,第三三通阀13的公共口com3连通蠕动泵16的入水口。
25.第四三通阀14的公共口com4连通蠕动泵16的出水口,第四三通阀14的第二选通口no4连通比色皿10,结合图2所示。
26.在本实施例中,比色皿10优选采用耐腐蚀的石英比色皿,下端为进样入口,连通所述第四三通阀14的第二选通口no4,上端为出样口,这样可有效避免气体干扰。
27.作为一种优选实施例,可以将四个三通阀11-14的常闭端口作为第一选通口,将常开端口作为第二选通口,以简化控制流程,避免对阀体进行频繁地切换控制。
28.本实施例的光学检测系统所要完成的功能主要包括:(1)利用可激发荧光信号的激光光源照射比色皿中的海水进样,以激发出荧光信号并进行收集,生成荧光光谱数据;(2)利用可激发拉曼光信号的激光光源照射比色皿中的恒温混合液体,以激发出
拉曼光信号并进行收集,生成拉曼光谱数据。
29.为实现上述功能,如图2所示,本实施例在光学检测系统中主要配置有荧光光路系统和拉曼光路系统。其中,荧光光路系统主要包括荧光激光光源21、第一准直透镜22、第一窄带滤光片23、第一汇聚透镜24、第二准直透镜25、第一长波通滤光片26、第二汇聚透镜27和荧光探测器28。拉曼光路系统主要包括差分拉曼激光器31、第三准直透镜32、短波通二向色镜33、第二窄带滤光片34、反射镜35、第三窄带滤光片38、第一长波通二向色镜36、第三汇聚透镜37、第二长波通二向色镜39、第二长波通滤光片40、第四汇聚透镜41和拉曼探测器42。
30.其中,荧光激光光源21优选采用超高亮度的led光源,光谱范围在355nm~365nm之间,发散角为60
°
,光功率为0.5w。本实施例以360nm的激光为例进行说明。功率可达0.5w的超高亮度的360nm激光可以有效激发探测物发出荧光信号,发散角60
°
可以满足后续透镜对光线准直处理的要求。
31.第一准直透镜22位于荧光激光光源21的后方(以光线的传输方向定义前方和后方),用于对荧光激光光源21发射的360nm的激光进行准直处理,以实现光束的平行出射,保证光线在光纤中平行传输。
32.第一窄带滤光片23位于第一准直透镜22的后方,用于消除波长在360nm以外的杂散光,激发光的单色性,有效避免宽光谱激发带来的荧光信号复杂、不易分辨等问题。
33.第一汇聚透镜24位于第一窄带滤光片23的后方,用于将360nm的激光汇聚到石英比色皿10内,利用小光斑、高能量的360nm的激光激发含有溢油的海水,以保证溢油发出荧光信号。
34.第二准直透镜25用于收集激发出的荧光信号。鉴于激发出的荧光信号是无特定方向的散射光,因此需要特定焦距和直径的透镜将荧光信号进行收集,以使荧光信号尽可能地以平行光通过第一长波通滤光片26,实现杂散光的滤除。
35.第一长波通滤光片26位于第二准直透镜25的后方,用于滤除荧光信号以外的杂散光。在荧光信号中往往会伴随有360nm的反射光和其它干扰光,采用长波通滤光片可以滤除其它光对荧光探测的干扰。
36.第二汇聚透镜27位于第一长波通滤光片26后方,用于将荧光信号汇聚于荧光探测器28,通过荧光探测器28实现荧光的有效探测。
37.在本实施例中,所述荧光探测器28可以选择用于荧光信号检测的光谱仪,光谱范围在200nm~600nm之间,主要用于荧光信号的接收和光电转换,实现荧光光谱数据的输出。
38.差分拉曼激光器31优选采用785nm/830nm差分拉曼激光器,即,可发射785nm和830nm两种波长的激光,线宽最大0.1nm,最大输出功率600mw,输出光纤接口fc/pc,外接光纤,以保证光输出效率,便于后方透镜对光线进行准直处理。
39.第三准直透镜32位于差分拉曼激光器31的后方,用于激光的准直,实现光束的平行出射。
40.短波通二向色镜33位于第三准直透镜32的后方,45
°
角放置,用于785nm激光的透光和830nm激光的反射,实现两束激光的分路传输。
41.第二窄带滤光片34位于短波通二向色镜33的后方,用于透过785nm的激光,并滤除掉785nm激光以外的杂散光,实现光束的单色性,以满足拉曼信号激发的要求。
42.反射镜35位于第二窄带滤光片34的后方,呈45
°
角放置,用于反射785nm的激光,实现光路的转向,以缩短光路长度,实现后向探测。
43.第一长波通二向色镜36位于反射镜35的下方,呈45
°
角放置,用于对785nm的激光进行反射,同时可以透射大于785nm所属拉曼光,实现785nm激光光束的转向,并对收集到的拉曼信号中的杂散光进行滤除。
44.第三汇聚透镜37位于第一长波通二向色镜36与石英比色皿10之间,用于对785nm和830nm的激光进行汇聚,形成小光斑,以提高光束单位面积的能量,使两束激光可以激发比色皿中的恒温混合液体发出拉曼散射光。同时,还用于收集两束激光激发产生的拉曼散射光,以使拉曼散射光尽可能地以平行光通过后续的光学器件,实现杂散光的滤除。
45.第三窄带滤光片38用于将通过短波通二向色镜33反射的830nm激光透过,并滤除掉830nm以外的杂散光,实现光束的单色性,以满足拉曼光信号激发的要求。
46.第二长波通二向色镜39呈45
°
角放置,将830nm的激光反射至第一长波通二向色镜36,通过第一长波通二向色镜36透射至第三汇聚透镜37,以形成小光斑、高能量的830nm激光照射比色皿10中的恒温混合液体,以激发出830nm所属拉曼散射光。
47.第三汇聚透镜37收集785nm和830nm两束所属拉曼散射光,处理成平行光,依次透过所述第一长波通二向色镜36和第二长波通二向色镜39。所述第一长波通二向色镜36和第二长波通二向色镜39具有对拉曼光透射的特性,将两束拉曼光传输至第二长波通滤光片40。
48.第二长波通滤光片40用于滤除非拉曼光,主要是消除785nm和830nm反射光对拉曼探测的影响。
49.第四汇聚透镜41位于第二长波通滤光片40的后方,用于将拉曼光汇聚于拉曼探测器42,通过拉曼探测器42实现拉曼光的有效探测。
50.在本实施例中,所述拉曼探测器42可以选择用于拉曼信号检测的光谱仪,拉曼频移范围150cm-1
~3500cm-1
, 主要用于拉曼信号的接收和光电转换,实现拉曼光谱数据的输出。
51.作为一种优选实施例,优选采用表面增强拉曼光谱(sers)进行拉曼探测。使用表面增强拉曼光谱探测溢油污染物时,时常会伴随荧光的产生。荧光信号强于拉曼信号,会导致拉曼信号淹没在荧光里面,无法提取到有用的拉曼信号。溢油污染物在被785nm和830nm波长的激光激发出拉曼光谱时的荧光信号是不会发生明显位移的,而拉曼光谱的光谱特征峰会随激发光而会发生频移,与激发光保持一定的位置关系。因此,将785nm波长的激光激发的溢油拉曼特征光谱与830nm波长的激光激发的溢油拉曼特征光谱做差减,便可得到消除荧光的拉曼光谱信息,由此可提高拉曼探测的精确度。
52.自动控制单元主要用于控制自动环流平台中四个三通阀11-14的通路切换以及恒温混合环流管15和蠕动泵16的开关控制;同时,对光学检测系统中的荧光激光光源21和差分拉曼激光器31的开关时序进行控制,并接收荧光探测器28和拉曼探测器42输出的荧光光谱数据和拉曼光谱数据,以进行海水溢油的分类检测。
53.下面结合图1和图2所示的海水溢油分类检测装置,对本实施例所提出的海水溢油分类检测方法进行详细阐述。
54.首先,对采集到的含有溢油的海水进行荧光探测,具体包括以下过程:
自动控制单元首先控制自动环流平台中的第三三通阀13的公共口com3与其第一选通口nc3连通,并控制第四三通阀14的公共口com4与自身的第二选通口no4连通,启动蠕动泵16,向比色皿10中泵入含有溢油的海水,时间约为10s,以用于荧光光谱探测。
55.自动控制单元启动光学检测系统中的荧光激光光源21发射380nm的激光,并启动荧光探测器28采集海水溢油激发出的荧光信号,以生成荧光光谱数据。
56.自动控制单元采集荧光探测器28输出的荧光光谱数据,并执行以下处理过程,结合图3所示:s301、对荧光光谱数据进行光谱平滑去噪声处理,以得到平滑荧光光谱图。
57.由于采集到的荧光光谱中会含有很多噪音,如果直接提取荧光信息的话,这些噪音会影响提取效果。本实施例对荧光光谱数据的平滑去噪声处理可以采用savitzky-golay多项式平滑,通过加权平均,实现光谱去噪。
58.具体过程为:将采集到的光谱数据p[n]与平滑权重向量w[n]进行卷积运算,公式为:其中,ni为第i个光谱数据;z为光谱数据的总个数,且m取z/2的整数;wj为平滑权重因子;e[n]为平滑后的光谱数据,平滑后的效果如图4所示(图4中,横坐标表示光谱位置,纵坐标表示光强度)。
[0059]
s302、对平滑荧光光谱图进行基线校正,去除本地基线。
[0060]
在本实施例中,可以首先获取荧光暗背景光谱,然后从平滑荧光光谱图中扣除所述荧光暗背景光谱,得到去除本地基线后的荧光光谱图,完成基线校准。
[0061]
基线校准的基本过程为:首先,寻找光谱的baseline曲线b[n],方法为将原始光谱数据p[n]与通过savitzky-golay多项式平滑处理后的光谱数据e[n]中的每个点进行对比分析,即,对p[ni]与e[ni]作对比,取两者的较小值组合生成baseline曲线b[n];其次,将原始光谱数据p[n]与生成的baseline数据做差值,并采用梯形法求积分,形成新的矩阵c[n];接下来,寻找同时满足条件c[n
i-1
]《 c[n
i-2
]、c[n
i-1
]《 c[ni]的点n
i-1
,提取b[n
i-1
]生成最小基线b
min
[n];最后,将原始光谱数据p[n]与b
min
[n]做差值,得到基线校正后的光谱数据d[n]。基线校正后的效果图如图5所示(图5中,横坐标表示光谱位置,纵坐标表示光强度)。
[0062]
s303、对去除本地基线后的荧光光谱图进行峰值拾取,拾取出所有特征峰的光谱位置和强度。
[0063]
在本实施例中,平滑及基线校正后的光谱数据可表述为:d[n]={n1, n2, n3,
…
,nz}。
[0064]
为拾取荧光光谱中的特征峰,可以采用以下特征峰拾取过程:将光谱数据d[n]中每5个相邻数据点组成一组数据,可以记为ak{n
i-2
, n
i-1
, ni, n
i 1
, n
i 2
},其中,ni表示光谱坐标为i处的光强度,即,峰高;
对每一组数据中的5个数据点进行升序排序;若相邻的三组数据a
k-1
、ak、a
k 1
中,a
k-1
的光谱坐标升序,ak的光谱坐标乱序,a
k 1
的光谱坐标降序,则将ak位置判定为特征峰位置。
[0065]
举例说明:假设对a8、a9、a
10
三组数据进行升序排列后得到:a8{2643
742
,2784
743
,2832
744
,2903
745
,2923
746
}a9{3000
751
,3115
748
,3220
747
,3314
750
,3423
749
}a
10
{2822
752
,2713
753
,2590
754
,2345
755
,2212
756
}。
[0066]
其中,a8的光谱坐标为升序,a9的光谱坐标为乱序,a
10
的光谱坐标为降序,因此,可判定a9为一个特征峰的位置。
[0067]
s304、将拾取出的特征峰的光谱位置和强度,与汽油和柴油的荧光光谱图谱进行比对,以识别出所述溢油是否为汽油或柴油。若为汽油或柴油,则执行溢油浓度检测过程,即,跳转至步骤s311;否则,采用拉曼探测技术对海水溢油进行分类识别。
[0068]
对采集到的含有溢油的海水进行拉曼探测,具体包括以下过程:首先,自动控制单元控制自动环流平台中的第一三通阀11、第二三通阀12和第四三通阀14的公共口com1、com2、com4分别与其自身的第一选通口nc1、nc2、nc4连通,并控制第三三通阀13的公共口com3与其自身的第二选通口no3连通,将拉曼光谱探测所需的纳米材料泵入恒温混合环流管15,实现纳米材料的进样,时间约为10s。
[0069]
而后,自动控制单元控制第二三通阀12的公共口com2与其自身的第二选通口no2连通,并控制第三三通阀13的公共口com3与其自身的第一选通口nc3连通,泵入一定量含有溢油的海水,实现海水样本的进样。可以通过控制海水样本的进样时间调整海水样本的泵入量,满足拉曼光谱探测的要求。
[0070]
然后,自动控制单元控制第三三通阀13的公共口com3与其自身的第二选通口no3连通,形成混合环路,使海水样本与纳米材料通过恒温混合环流管15进行充分混合并保持恒温,以形成恒温混合液体。混合时间约为30s。
[0071]
最后,自动控制单元控制第四三通阀14的公共口com4与其第二选通口no4连通,将恒温混合液体泵入石英比色皿10,时间约为10s,以进行拉曼光谱探测。
[0072]
自动控制单元启动光学检测系统中的差分拉曼激光器31发射波长为785nm和830nm的激光,并启动拉曼探测器42采集海水溢油激发出的两路拉曼光信号,以生成两组拉曼光谱数据。
[0073]
自动控制单元采集拉曼探测器42输出的拉曼光谱数据,并执行以下处理过程,结合图3所示:s305、对采集到的785nm所属拉曼特征光谱和830nm所属拉曼特征光谱做差分,得到消除荧光后的拉曼光谱数据,即,差分表面增强拉曼光谱数据。
[0074]
s306、对差分表面增强拉曼光谱数据进行光谱平滑去噪声处理,以得到平滑的sers光谱图。
[0075]
在本实施例中,对差分表面增强拉曼光谱数据进行光谱平滑去噪声处理,可以采用对荧光光谱数据进行光谱平滑去噪声处理的相同方法,即,采用savitzky-golay多项式平滑处理法去除噪声,具体方法可参见步骤s301。
[0076]
s307、对平滑的sers光谱图进行基线校正,去除本地基线。
[0077]
在本实施例中,对平滑的sers光谱图进行基线校正,可以采用对平滑荧光光谱图进行基线校正的相同方法,具体过程可参见步骤s302。
[0078]
s308、对去除本地基线后的sers光谱图进行峰值拾取,拾取出所有特征峰的光谱位置和强度。
[0079]
在本实施例中,对去除本地基线后的sers光谱图进行峰值拾取,可以采用对去除本地基线后的荧光光谱图进行峰值拾取的相同方法,具体过程可参见步骤s303。
[0080]
s309、将拾取出的特征峰的光谱位置和强度,与原油及成品油多环芳烃种类特征的拉曼光谱图谱进行比对,识别出溢油中所含的多环芳烃种类。
[0081]
s310、根据溢油中所含的多环芳烃种类及各类多环芳烃的含量占比,识别出溢油的类型。
[0082]
在本实施例中,可以根据萘、菲、蒽、荧蒽、芘五种多环芳烃的占比判断溢油的类型。具体过程为:提取多环芳烃中萘、菲、蒽、荧蒽、芘五种物质所对应的特征峰的峰高;计算所述五种物质的峰高之和,形成总峰高;计算萘、菲两种物质所对应的特征峰的峰高之和相对所述总峰高的占比;若萘、菲两种物质的占比高于20%,则判定为轻质油;若萘、菲两种物质的占比在10%~20%之间,则判定为燃料油;若萘、菲两种物质的占比低于10%,则判定为原油。
[0083]
s311、检测溢油的浓度。
[0084]
由于光谱图中的特征峰与样品浓度之间存在线性关系,因此,可利用多元线性回归分析方法,实现溢油的定量检测。
[0085]
具体过程为:若识别出的溢油为汽油或柴油,则提取荧光光谱图中的所有特征峰强度;若识别出的溢油为原油、燃料油或者轻质油,则提取拉曼光谱图中的所有特征峰强度;利用以下多元线性回归模型,计算溢油浓度:y=b0 b1x1 b2x2
…
brxr e;其中,y表示溢油浓度;x1,x2,
…
,xr表示从荧光光谱图或拉曼光谱图中提取到的r个特征峰强度,r为特征峰的总个数;e为随机误差项;b0为常数项;b1,b2,
…
,br为回归系数,其中,b1为x2,x3,
…
,xr固定时,x1每增加一个单位对y的效应,即,x1对y的偏回归系数;同理,b2为x1,x3,
…
,xr固定时,x2每增加一个单位对y的效应,即,x2对y的偏回归系数;br为x1,x2,
…
,x
r-1
固定时,xr每增加一个单位对y的效应,即,xr对y的偏回归系数。
[0086]
由此,便实现了海水溢油的分类识别及浓度检测功能。
[0087]
需要说明的是,特征峰的检测是荧光-拉曼光谱数据分析的初始步骤,不能准确地估计出特征峰的位置,可能会在识别潜在油品时产生问题,并可能导致错误的预测。因此,准确估计特征峰的位置、峰高(光强度)等峰参数是非常重要。本实施例在峰值检测程序中,采用光谱平滑、基线校正、峰值拾取三个步骤,可以提高特征峰拾取的准确性,进而提高海水溢油分类识别及浓度检测的精准度。
[0088]
在拉曼光谱探测结束后,自动控制单元控制第一三通阀11的公共口com1与其第二
选通口no1连通,并控制第二三通阀12和第四三通阀14的公共口com2、com4与自身的第一选通口nc2、nc4连通,将管道清洗液泵入自动环流平台的管路中。通过控制泵入时间,调整管道清洗液的泵入量。
[0089]
在泵入适量的管道清洗液后,自动控制单元控制第二三通阀12的公共口com2与其第二选通口no2连通,以形成清洗环路,对自动环流平台的管路进行自动清洗。
[0090]
之后,自动控制单元控制第四三通阀14的公共口com4与其第二选通口no4连通,对石英比色皿10进行清洗。
[0091]
由此,完成了自动环流平台的管路自动清洗工作,为下次的溢油采样及检测工作做好准备。
[0092]
当然,以上所述仅是本发明的一种优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。