1.本技术涉及管道检测技术领域,特别涉及一种高通过性管道变径检测及定位装置。
背景技术:
2.近年来,随着我国石油天然气行业的快速发展,长输油气管道长度已累计超过17万公里,预计2025年将达到24万公里。随着管道运营时间的延长,管道老化问题日益突出,管道运行安全问题越来越受到人们的重视。根据国内外管道事故统计资料分析,管道投入运行的早期和后期是事故的高发期,管道难免受到诸多例如天气、环境、第三方施工破坏以及管道老化等因素的影响,致使管道产生不同程度的损坏,为管道运行带来安全隐患,不仅会造成巨大的经济损失,对周边环境等也会产生严重的影响。管道事故发生的可能性是随着管道运行时间的增加而急剧增加的。所以,管道作为重要的能源运输工具,其运输的安全性尤为重要。
3.现有的变径检测器多为钢制骨架搭载变径检测探头来实现管道变径检测功能。变径检测探头多放置在检测支臂上,通过计算支臂通过管道时的夹角,计算变径大小。支臂由于为钢制结构,变形量较差,因此不宜排列过于密集,存在变径缺陷不能完全被检测的风险。
4.传统的管道变径检测装置多设计为以钢制骨架作载体,其通过能力较差,对检测管道环境要求较高,而且在传统钢制骨架变径检测器中,变径检测器没有对管道内壁污垢处理的智能控制功能,存在卡堵的风险,在使用前需进行多次清管作业,消耗大量人力物力;传统的管道变径检测装置搭载的变径检测探头通常与管壁直接接触,磨损量大,且采集信号不稳定,管道变径检测数据不够精准;在信号传输上,现有的变径检测器传输的信号只有位置信号,而没有经智能分析后的管道变径及内壁污垢的信息。
技术实现要素:
5.本技术提供了一种高通过性管道变径检测及定位装置,用于解决传统的管道变径检测装置没有对管道内壁污垢处理的智能控制功能,存在卡堵风险的问题。
6.本技术采用的技术方案如下:本技术提供了一种高通过性管道变径检测及定位装置,包括:外壳和内腔,所述外壳朝向行进方向的一端设置为圆头,另一端设置为平头;所述外壳的外圆周侧面与管道内壁相接触,所述外壳内部设有内腔,所述内腔中设有智能分析控制机构、定位机构、信号发射机、惯性测量机构、供电系统以及信息采集存储机构,所述惯性测量机构、供电系统以及信息采集存储机构之间相互电连接;所述智能分析控制机构、供电系统以及信息采集存储机构之间相互电连接;所述智能分析控制机构与信号发射机之间电连接;所述定位机构、供电系统以及信号发射机之间相互电连接;所述外壳内嵌有多个变径检测探头机构,所述变径检测探头机构与所述信息采集存储机构电连接,多个所述变径检测探头机构位于所述外
壳沿行进方向上的同一横截面上,且多个所述变径检测探头机构在所述外壳的周向上均匀布置;所述信息采集存储机构被配置为采集和存储所述变径检测探头机构采集的压力值信息和所述惯性测量机构采集的行进加速度信息及角度值信息;所述智能分析控制机构被配置为读取所述信息采集存储机构采集的压力值信息和行进加速度信息及角度值信息;所述智能分析控制机构被配置为对所述压力值信息进行分析,并将压力值信息发送给信号发射机;所述定位机构被配置为发送位置信息给信号发射机;所述供电系统被配置为向所述信息采集存储机构、惯性测量机构、智能分析控制机构、定位机构和变径检测探头机构供电;所述惯性测量机构被配置为获取行进加速度信息及角度值信息,并将所述行进加速度信息及角度值信息发送至所述信息采集存储机构;所述信号发射机被配置为获取所述定位机构发送的位置信息以及智能分析控制机构输出的分析数据,并将位置信息及分析数据发送给地面上的接收机构。
7.优选的,所述外壳的材料为全聚氨酯发泡材质。
8.优选的,所述外壳平头一侧设有里程轮法兰盘,所述里程轮法兰盘上设有3个里程轮机构,3个所述里程轮机构沿管道周向均匀布置;所述供电系统还被配置为向里程轮机构供电;所述里程轮机构与所述信息采集存储机构电连接,所述里程轮机构被配置为获取当前所述装置的里程信息,并将所述里程信息发送至所述信息采集存储机构。
9.所述信号发射机被配置为获取所述信息采集存储机构存储的里程信息,并将里程信息发送给地面上的接收机构。
10.优选的,所述供电系统为电池组。
11.优选的,所述外壳内部沿行进方向设有多个射流管,所述射流管沿所述外壳的周向均匀分布,所述射流管位于所述外壳圆头的一端设置有高压组合型扇形喷嘴;所述智能分析控制机构被配置为对压力值信息和行进加速度信息及角度值信息进行分析,得出管道内壁污垢量信息,并根据所述管道内壁污垢量信息控制高压组合型扇形喷嘴的喷射角度及开闭状态。
12.优选的,所述射流管数量设置为六个。
13.优选的,所述变径检测探头机构形状是长条状,所述变径检测探头机构的长条状延伸方向与装置行进方向平行。
14.优选的,所述变径检测探头机构与外壳的接触面经抛光处理。
15.本技术具有的有益效果:在投产前管道及管道环境较差或管道环境不明的在役管道内均可使用,降低卡堵风险并减少清管次数。本装置中的变径检测探头机构设置在外壳内部,不与管壁直接接触,不存在磨损情况,因此采集来的信号较为稳定,检测数据较为准确。本装置能够根据实时检测的压力值信息和行进加速度信息及角度值信息,智能分析判断出管道内壁是否存在污垢,并在判断出管道内壁存在污垢后,控制高压组合型扇形喷嘴喷射,以防止管道卡堵。本装置实时向地面上的接收机构传送管道位置信息及分析数据,传
送的信息种类丰富。
附图说明
16.为了更清楚地说明本技术的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,对于本领域普通技术人员而言,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
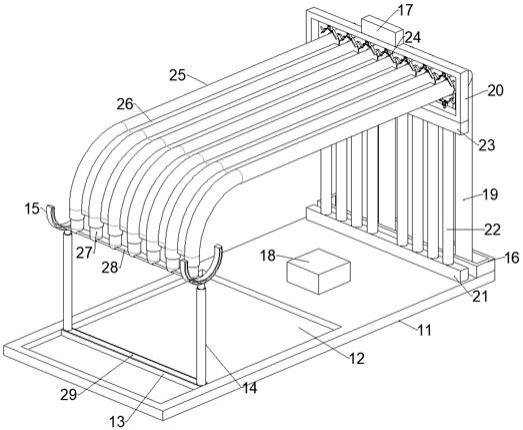
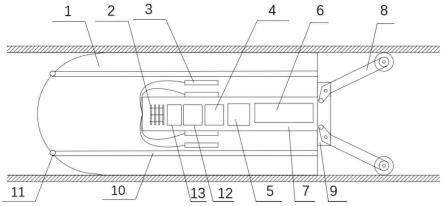
17.图1为本技术一种高通过性管道变径检测及定位装置的结构图;图2为本技术一种高通过性管道变径检测及定位装置的剖面图;图3为本技术一种高通过性管道变径检测及定位装置无变径情况下的示意图;图4为本技术一种高通过性管道变径检测及定位装置小变径情况下的示意图;图5为本技术一种高通过性管道变径检测及定位装置大变径情况下的示意图;图6为本技术一种高通过性管道变径检测及定位装置的智能分析控制机构工作流程示意图。
18.图中:1-外壳、2-信息采集存储机构、3-变径检测探头机构、4-供电系统、5-惯性测量机构、6-信号发射机、7-内腔、8-里程轮机构、9-里程轮法兰盘、10-射流管、11-高压组合型扇形喷嘴、12-智能分析控制机构、13-定位机构。
具体实施方式
19.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
20.本技术提供了一种高通过性管道变径检测及定位装置,由图1可知,所述装置包括:外壳1、信息采集存储机构2、变径检测探头机构3、供电系统4、惯性测量机构5、信号发射机6、内腔7、智能分析控制机构12、定位机构13。
21.所述外壳1朝向行进方向的一端设置为圆头,因为本装置在管道内行进的过程中会遇到很多情况,当管道内壁上的污垢特别多或者管道发生严重的变径情况时,所述外壳1使用圆弧形的结构可以减小阻力,更顺利地通过管道内部有阻碍的位置,此处也可设置为其他沿行进方向收缩的结构;而所述外壳1另一端设置为平头,首先是因为可以很好的贴合管道内壁,即使装置发生卡堵,也可利用管道内部压差行进;其次,所述外壳1的另一端为平头使安装设备更加方便,此处的形状还可以为贴合管道并且拥有平整安装面的形状;所述外壳1的外圆周侧面与管道内壁相接触并完全贴合。
22.所述外壳1内部设有内腔7,所述内腔7中设有智能分析控制机构12、定位机构13、信号发射机6、惯性测量机构5、供电系统4以及信息采集存储机构2,所述惯性测量机构5、供电系统4以及信息采集存储机构2之间互相电连接;所述智能分析控制机构12、供电系统4以及信息采集存储机构2之间相互电连接;所述智能分析控制机构12与信号发射机6之间电连接;所述定位机构13、供电系统4以及信号发射机6之间相互电连接。
23.所述外壳1内嵌有多个变径检测探头机构3,所述变径检测探头机构3与所述信息采集存储机构2电连接,所述信息采集存储机构2采集和存储所述变径检测探头机构3采集
的压力值信息和惯性测量机构5采集的行进加速度信息及角度值信息;多个所述变径检测探头机构3位于所述外壳1沿行进方向上的同一横截面上,且多个所述变径检测探头机构3在所述外壳1内部的周向上均匀布置,每个所述变径检测探头机构3上均搭载一组敏感压力传感芯片,且每个所述变径检测探头机构3之间间距比较小,检测的覆盖率与现有的机械式装备相比要高50%以上,通过所述变径检测探头机构3测量被测管道内壁对外壳1的压力值大小,判断当前位置变径情况,为管道后期的维修维护提供有力保障;所述智能分析控制机构12读取最近100组信息采集存储机构2中获取到的所述变径检测探头机构3采集的压力值信息和惯性测量机构5采集的行进加速度信息及角度值信息;所述智能分析控制机构12对100组信息采集存储机构2获取到的所述变径检测探头机构3采集的压力值信息进行分析,得出管道是否变径的结果,并将此结果发送给信号发射机6;所述供电系统4向所述信息采集存储机构2、惯性测量机构5、智能分析控制机构12、定位机构13和变径检测探头机构3供电;所述惯性测量机构5获取行进加速度信息及角度值信息,可以更好的判断管道走向,所述信息采集存储机构2获取所述惯性测量机构5获取行进加速度信息及角度值信息;所述信号发射机6获取所述定位机构13发送的位置信息以及智能分析控制机构12输出的分析数据,并将信息发送给地面上的接收机构。
24.在本技术中,由图2可知,所述变径检测探头机构3在所述外壳1内部的周向上均匀布置,而不是传统装置那样将检测探头放置在装置外部;在传统装置中检测探头设置在机械支臂上,与管道内壁直接接触,在管道内部条件极为恶劣的情况下有可能损坏探头,从而导致检测结果不准确,更有甚者会造成整个管道的堵塞;而在本技术中,将所述变径检测探头机构3在所述外壳1内部的周向上均匀布置,不会受到管道内壁的恶劣环境所影响,所述变径检测探头机构3可以根据管道内壁给外壳1的压力,测得准确数值;所述信息采集存储机构2获取所述变径检测探头机构3采集的压力值信息。
25.在本实施例中,因管道长期工作导致管道发生变径,而本技术所述一种高通过性管道变径检测及定位装置在管道内进行变径检测及定位工作。在本装置行进过程中,所述供电系统4向所述信息采集存储机构2、惯性测量机构5、智能分析控制机构12、定位机构13和变径检测探头机构3供电,本装置随着管道内的前后压差向前行进,所述外壳1外圆周侧面与管道内壁完全贴合,当本装置经过管道内无变径位置时,所述智能分析控制机构12读取最近100组信息采集存储机构2获取到的所述变径检测探头机构3采集的压力值信息,并分析采集的压力值信息,得出管道未发生变径的结果,并将所述压力值信息发送给信号发射机6;在经过管道内变径区域时,管道变径位置给予所述外壳1压力使其发生形变,所述外壳1形变位置与所述变径检测探头机构3接触,所述智能分析控制机构12读取最近100组信息采集存储机构2获取到的变径检测探头机构3采集的压力值信息,并分析采集的压力值信息,得出管道发生变径的结果,并将所述压力值信息发送给信号发射机6,以此类推,通过所测得的压力值大小进行相关计算,进而确定管道该位置的变径大小。所述智能分析控制机构12读取最近100组信息采集存储机构2获取到的惯性测量机构5采集的行进加速度信息及角度值信息,并根据所测得的数值信息进行定位,获取管道变径的准确位置,识别管道变径缺陷。
26.所述外壳1的材料为全聚氨酯发泡材质,采用全聚氨酯发泡材质的所述外壳1变形量高达60%以上,有较高的弹性和韧性,在管道内通过能力极强,易于通过弯管,即使在发生
卡堵时,也可以通过提高管道内压力使所述外壳1破裂,自行解除堵管,且成本与普通钢制骨架相比要低60%以上。根据本技术上述内容可知,现有技术的载体为钢制骨架,在管道内行进时,遇到极其恶劣的环境时很容易造成管道堵塞;而本技术的所述外壳1采用全聚氨酯发泡材料,在管道内行进时可以产生一定程度的形变,并在遇到极其恶劣的管道内环境时,可以利用管道内壁对所述外壳1的巨大压力使所述外壳1破裂,从而解决管道内堵塞的问题,使本技术装置与使用钢支架的装置相比,通过性能提高40%。
27.所述外壳1平头一侧设有里程轮法兰盘9,所述里程轮法兰盘9连接使用方便,而且能够承受较大的压力,现有法兰盘按结构型式,分为:整体法兰、活套法兰和螺纹法兰,所述里程轮法兰盘9的结构形式在此处不做限定;所述里程轮法兰盘9上设有3个里程轮机构8,此处设置3个所述里程轮机构8可以在满足工作需要的同时,又可以保证本技术装置具有最佳的通过效率,若所述里程轮机构8设置过多,在管内环境极其恶劣的管道内部中会造成卡堵情况;所述里程轮机构8结构简单,可靠性和适应性强,3个所述里程轮机构8沿管道周向均匀布置,因为管道内壁的污垢有很多不确定性,将3个所述里程轮机构8沿管道周向360
°
均匀布置可以保证本装置在管道内壁上的任意方向都拥有良好的行进能力;所述供电系统4向所述里程轮机构8供电;所述里程轮机构8与所述信息采集存储机构2电连接,所述里程轮机构8被配置为获取当前所述装置的里程信息,并将所述里程信息发送至所述信息采集存储机构2,所述信号发射机6获取所述信息采集存储机构2发送的里程信息,并将信息发送给地面上的接收机构。
28.所述供电系统4为电池组,电池组有两种形式:串联和并联。并联的电池组要求每个电池电压相同,输出的电压等于一个电池的电压,并联电池组能提供更强的电流;串联电池组没有过多的要求,只要保证电池的容量差不多即可,串联电池组可以提供较高的电压。
29.所述外壳1内部沿行进方向设有多个射流管10,由图2可知,所述射流管10沿所述外壳1的周向均匀分布,所述射流管10位于所述外壳1圆头的一端设置有高压组合型扇形喷嘴11。当本装置在管道内行进时,从高压组合型扇形喷嘴11出来的高压水,在圆周方向上形成360
°
的环形高压冲击力,冲掉管道内壁上的污垢,并将污垢冲走,避免卡堵的同时,也减小了整个装置外壳1的磨损并提高了设备的通过性。
30.所述智能分析控制机构12对100组信息采集存储机构2获取到的所述变径检测探头机构3采集的压力值信息和惯性测量机构5采集的行进加速度信息及角度值信息进行分析,得出管道内壁污垢量信息,并根据所述管道内壁污垢量信息控制高压组合型扇形喷嘴11喷射角度及开闭状态;所述定位机构13发送位置信息给信号发射机6。
31.所述射流管10的数量设置为六个,经过试验得知,当射流管10为六个时,其六组高压组合型扇形喷嘴产生的喷雾对管壁的冲击力最均匀,可以达到最佳的清理管道内壁的效果,并使本装置顺利行进。高压组合型扇形喷嘴11与射流管10数量一致,由于高压组合型扇形喷嘴11结构特点,处于中间的水流冲击力大,冲击力沿中心向外递减,因此在本技术中合理布置了六个高压组合型扇形喷嘴,使喷射角有25%-30%的重叠,产生均匀、液滴大小相等的水流,从而使清理效率更高。
32.所述变径检测探头机构3形状是长条状,所述变径检测探头机构3的长条状延伸方向与本技术装置行进方向平行;将所述变径检测探头机构3沿本技术装置行进方向延伸一定长度,可以增加所述变径检测探头机构3与所述外壳1的接触面积,从而提升检测灵敏度。
33.所述变径检测探头机构3与外壳1的接触面经抛光处理;若不将所述变径检测探头机构3的外表面抛光,会导致所述变径检测探头机构3与所述外壳1之间产生不必要的摩擦力,导致检测结果不准确;抛光是指利用机械、化学或电化学的作用,使工件表面粗糙度降低,以获得光亮、平整表面的加工方法,是利用抛光工具和磨料颗粒或其他抛光介质对工件表面进行的修饰加工。
34.抛光不能提高工件的尺寸精度或几何形状精度,而是以得到光滑表面或镜面光泽为目的,有时也用以消除光泽(消光)。通常以抛光轮作为抛光工具,抛光轮一般用多层帆布、毛毡或皮革叠制而成,两侧用金属圆板夹紧,其轮缘涂敷由微粉磨料和油脂等均匀混合而成的抛光剂。抛光时,高速旋转的抛光轮(圆周速度在20米/秒以上)压向工件,使磨料对工件表面产生滚压和微量切削,从而获得光亮的加工表面,当采用非油脂性的消光抛光剂时,可对光亮表面消光以改善外观。
35.抛光的方式包括:机械抛光、化学抛光、电解抛光、超声波抛光、流体抛光以及磁研磨抛光。其中,机械抛光和化学抛光应用的比较广泛。
36.机械抛光,所述机械抛光是通过切削的方法和将材料表面塑性变形去掉被抛光后的凸部的方法从而得到平滑面,一般使用油石条、羊毛轮、砂纸等,以手工操作为主,特殊零件如回转体表面,可使用转台等辅助工具,表面质量要求高的可采用超精研抛的方法。
37.化学抛光,所述化学抛光是让材料在化学介质中表面微观凸出的部分较凹部分优先溶解,从而得到平滑面。这种方法的主要优点是不需复杂设备,可以抛光形状复杂的工件,可以同时抛光很多工件,效率高。化学抛光的核心问题是抛光液的配制。
38.在本技术中对抛光的方式不做限制。
39.由图3-5可知本技术提供的一种高通过性管道变径检测及定位装置在不同情况下的工作状态以及在发生不同变径时管道内壁给予外壳1的压力状态。由上述内容可知,所述变径检测探头机构3设置在外壳1内部,当管道发生变径的情况时,所述管道发生变径的位置会给予本装置外壳1一定的压力;当管道未发生变径时,如图3所示,所述外壳1没有发生形变;如图4所示,当管道内壁发生小变径时,所述外壳1产生较小的形变,所述变径检测探头机构3受到外壳1的压力,并测量压力值;如图5所示,当管道内壁发生大变径时,所述外壳1产生较大形变,所述变径检测探头机构3受到外壳1的压力,并测量压力值。
40.由图6可知,智能分析控制机构12采用st公司生产的stm32单片机芯片作为中央处理单元。采用外部时钟电路,为单片机提供时钟,采用典型的复位电路实现单片机的启动及复位;采用典型的dcdc电源芯片,将高通过性管道变径检测及定位装置电源转换为单片机所需要的3.3v直流电源;采用rs485芯片实现rs485总线的通讯。单片机通过rs485通讯接口与信息采集存储机构2相连接,读取信息采集存储机构2采集的变径检测探头机构3采集的压力值信息和惯性测量机构5采集的行进加速度信息及角度值信息;单片机通过rs485通讯接口与信号发射机6相连接,将经过智能分析控制机构12分析处理的数据发送给信号发射机6。单片机通过rs485通讯接口与高压喷嘴控制机构相连接,将喷嘴角度控制信号发送给高压喷嘴控制机构,并通过高压喷嘴控制机构控制高压组合型扇形喷嘴11喷射。
41.本技术提供一种高通过性管道变径检测及定位装置,实现对管道沿途变径情况的检测及定位功能。在本技术中,本装置随着管道内部前后的压差实现行进动作,所述外壳1采用全聚氨酯发泡材质,所述外壳1外圆周侧面与管道内壁完全贴合,所述变径检测探头机
构3在所述外壳1内部的周向上均匀布置,当本装置经过管道内无变径位置时,所述智能分析控制机构12读取最近100组信息采集存储机构2获取到的所述变径检测探头机构3采集的压力值信息,并分析采集的压力值信息,得出管道未发生变径的结果,并将所述压力值信息发送给信号发射机6;在经过管道内变径区域时,管道变径位置给予所述外壳1压力使其发生形变,所述外壳1形变位置与所述变径检测探头机构3接触,所述智能分析控制机构12读取最近100组信息采集存储机构2获取到的变径检测探头机构3采集的压力值信息,并分析采集的压力值信息,得出管道发生变径的结果,并将所述压力值信息发送给信号发射机6,以此类推,通过所测得的压力值大小进行相关计算,进而确定管道该位置的变径大小。所述智能分析控制机构12读取最近100组信息采集存储机构2获取到的惯性测量机构5采集的行进加速度信息及角度值信息,并根据所测得的数值信息进行定位,获取管道变径的准确位置,识别管道变径缺陷。并且在装置行进过程中,利用射流管10及高压组合型扇形喷嘴11,冲走管道内污垢,而且本装置外壳1采用全聚氨酯发泡材质,即使本装置在遇到及其恶劣的环境时发生卡堵,也会利用此时管道内部对外壳1的巨大压强破坏其结构,大大降低了卡堵风险,保证管道检测的安全性。
42.本技术提供一种高通过性管道变径检测及定位装置,装置采用全聚氨酯发泡材质,具有60%变形的高通过性能,对进管环境要求低,并利用射流管10及高压组合型扇形喷嘴11冲走管壁污垢,即使本装置在遇到及其恶劣的环境时发生卡堵,也会利用此时管道内部对外壳1的巨大压强破坏其结构,大大降低了卡堵风险,保证管道检测的安全性。所述变径检测探头机构3环形布置在装置内部,所述多个变径检测探头机构3之间间距较小,因此采集数据较为完整,且所述变径检测探头机构3不与管道内壁直接接触,不存在磨损情况,对管道的变径信息检测精度高,检测结果准确,并能精准定位变径位置,为后期管道修理维护提供有力保障。
43.本技术提供一种高通过性管道变径检测及定位的检测方法,包括以下步骤:步骤一:采用本发明的高通过性管道变径检测及定位装置,可在管道介质的推力下在管内快速前进。当本装置在管道内行进时,管道介质通过射流管10从高压组合型扇形喷嘴11出来的高压水,在圆周方向上形成360
°
的环形高压冲击力,强力冲击清洗管壁污垢,减小了外壳1的磨损的同时也提高了设备的通过性。
44.步骤二:在装置内部布置若干个变径检测探头机构3,所述变径检测探头机构3环形布置在装置内部,当本装置在管道内行进时,变径检测探头机构3测定管壁对外壳1产生的挤压力,并把压力值信息发送给信息采集存储机构2,所述智能分析控制机构12通过对信息采集存储机构2中的压力值信息变化,实时了解管道是否有变径情况。
45.步骤三:在本装置外壳平头一端设置三个里程轮机构8,当本装置在管道内行进时,里程轮机构8一直沿着管壁前进,里程轮机构8测得的里程信息发送给信息采集存储机构2,所述智能分析控制机构12实时分析所述信息采集存储机构2中的里程信息,实时了解变径缺陷的位置信息。
46.最后应说明的是:以上实施例仅用以说明本技术的技术方案,而非对其限制;尽管参照前述实施例对本技术进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本技术各实施例技术方案的精神和
范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。