技术特征:
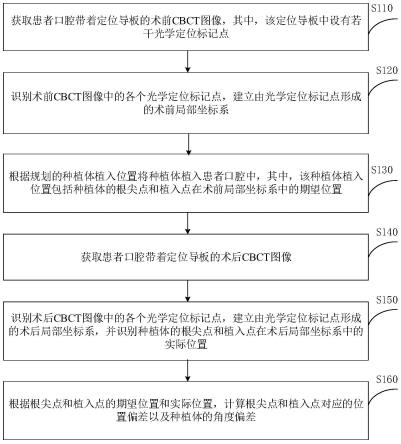
1.一种口腔种植精度评价方法,其特征在于,包括:获取患者口腔带着定位导板的术前cbct图像,所述定位导板中设有若干光学定位标记点;识别所述术前cbct图像中的各个所述光学定位标记点,建立由所述光学定位标记点形成的术前局部坐标系;根据规划的种植体植入位置将种植体植入患者口腔中,所述种植体植入位置包括种植体的根尖点和植入点在所述术前局部坐标系中的期望位置;获取患者口腔带着所述定位导板的术后cbct图像;识别所述术后cbct图像中的各个所述光学定位标记点,建立由所述光学定位标记点形成的术后局部坐标系,并识别所述种植体的根尖点和植入点在所述术后局部坐标系中的实际位置;根据所述根尖点和所述植入点的所述期望位置和所述实际位置,计算所述根尖点和所述植入点对应的位置偏差以及所述种植体的角度偏差。2.根据权利要求1所述的口腔种植精度评价方法,其特征在于,所述识别所述术前cbct图像中的各个所述光学定位标记点,建立由所述光学定位标记点形成的术前局部坐标系,包括:对所述术前cbct图像的不同断层图像进行格式转换,得到相应视图的横断面图像;根据所述光学定位标记点在所述术前cbct图像中的圆形直径,利用霍夫圆变换检测各个所述横断面图像中存在的圆形及各个圆形的圆心坐标;根据同一圆形在不同断层的所述圆心坐标以及对应断层的序号,获取当前圆形对应的球体中心在所述术前cbct图像中的三维坐标;根据所述三维坐标选取不在同一条直线上的三个球体中心,构建所述术前cbct图像中的术前局部坐标系。3.根据权利要求2所述的口腔种植精度评价方法,其特征在于,所述根据所述三维坐标选取不在同一条直线上的三个球体中心,之前还包括:若识别到的所述球体中心的数量超过所述定位导板中的所述光学定位标记点的数量,则通过聚类算法计算所有球体中心的质心,并从距离所述质心最远的球体中心开始删除,直到余下的球体中心的数量符合要求。4.根据权利要求1所述的口腔种植精度评价方法,其特征在于,所述识别所述种植体的根尖点和植入点在所述术后局部坐标系中的实际位置,包括:对所述术后cbct图像进行多平面重建,得到重新切片的不同断层图像;对每个所述断层图像分别进行转换,得到相应视图的横断面图像;利用轮廓检测算法查找各个所述横断面图像中的最大轮廓,并获得每个所述最大轮廓的包围盒大小;根据所述种植体的实际尺寸和所述最大轮廓的包围盒大小对所有横断面图像进行过滤,得到包含所述种植体的候选横断面图像;从所述候选横断面图像中筛选出最接近所述种植体的中心切面的目标横断面图像;检测所述目标横断面图像中的所述种植体的多个角点,并从所述多个角点中确定所述种植体的根尖点和植入点在所述术后局部坐标系中的实际位置。
5.根据权利要求4所述的口腔种植精度评价方法,其特征在于,所述从所述候选横断面图像中筛选出最接近所述种植体的中心切面的目标横断面图像,包括:提取各个所述候选横断面图像中的种植体区域,得到对应的局部图像;计算所述局部图像中的种植斜率,并根据所述种植体在口腔中的种植区域及所述种植斜率对所述局部图像进行旋转矫正,得到矫正图像;按照标准图像的大小对所述矫正图像进行放缩,计算放缩后的图像与所述标准图像的结构相似度;从各个所述结构相似度中选取出最大值对应的候选横断面图像,作为最接近所述种植体的中心切面的目标横断面图像。6.根据权利要求4所述的口腔种植精度评价方法,其特征在于,所述从所述多个角点中确定所述种植体的根尖点和植入点在所述术后局部坐标系中的实际位置,包括:计算各个所述角点到所述术后局部坐标系原点的欧式距离并选取出距离最远的若干点对;根据所述种植体的开口方向的不同,确定所述若干点对中最靠近所述植入点的第一点对及最靠近所述根尖点的第二点对;将所述第一点对和所述第二点对中靠近所述植入点的两个点的坐标均值作为所述植入点在所述局部坐标系中的坐标;将所述第一点对和所述第二点对中靠近所述根尖点的两个点的坐标均值作为所述根尖点在所述局部坐标系中的坐标。7.根据权利要求1所述的口腔种植精度评价方法,其特征在于,所述根据所述根尖点和所述植入点的所述期望位置和所述实际位置,计算各自对应的位置偏差以及所述种植体的角度偏差,包括:计算所述植入点的所述期望位置和所述实际位置之间的欧式距离,以作为所述植入点的位置偏差;计算所述根尖点的所述期望位置和所述实际位置之间的欧式距离,以作为所述根尖点的位置偏差;根据由所述植入点到所述根尖点在所述术前cbct图像中形成的第一向量以及由所述植入点到所述根尖点在所述术后cbct图像中形成的第二向量,计算所述第一向量与所述第二向量之间的夹角,以作为所述种植体的角度偏差。8.一种口腔种植精度评价系统,其特征在于,包括:图像获取模块,用于获取患者口腔带着定位导板的术前cbct图像,所述定位导板中设有若干光学定位标记点;坐标系建立模块,用于识别所述术前cbct图像中的各个所述光学定位标记点,建立由所述光学定位标记点形成的术前局部坐标系;种植控制模块,用于根据规划的种植体植入位置将种植体植入患者口腔中,所述种植体植入位置包括种植体的根尖点和植入点在所述术前局部坐标系中的期望位置;所述图像获取模块,还用于获取患者口腔带着所述定位导板的术后cbct图像;种植位置识别模块,用于识别所述术后cbct图像中的各个所述光学定位标记点,建立由所述光学定位标记点形成的术后局部坐标系,并识别所述种植体的根尖点和植入点在所
述术后局部坐标系中的实际位置;偏差计算模块,用于根据所述根尖点和所述植入点的所述期望位置和所述实际位置,计算所述根尖点和所述植入点对应的位置偏差以及所述种植体的角度偏差。9.一种终端设备,其特征在于,所述终端设备包括处理器和存储器,所述存储器存储有计算机程序,所述处理器用于执行所述计算机程序以实施权利要求1-7中任一项所述的口腔种植手术机器人种植精度的评价方法。10.一种可读存储介质,其特征在于,其存储有计算机程序,所述计算机程序在处理器上执行时,实施根据权利要求1-7中任一项所述的口腔种植手术机器人种植精度的评价方法。
技术总结
本申请实施例提供一种口腔种植精度评价方法、系统和终端设备,该方法包括:获取患者口腔带着定位导板的术前CBCT图像,识别所述术前CBCT图像中的光学定位标记点以建立术前局部坐标系;根据规划的种植体植入位置将种植体植入患者口腔中,所述种植体植入位置包括种植体的根尖点和植入点在术前局部坐标系中的期望位置;获取患者口腔带着定位导板的术后CBCT图像;识别术后CBCT图像中的光学定位标记点以建立术后局部坐标系,识别根尖点和植入点的实际位置;根据所述期望位置和所述实际位置,计算根尖点和植入点对应的位置偏差以及植体的角度偏差。该评价方法可以快速、准确且客观地评价种植体的植入精度。价种植体的植入精度。价种植体的植入精度。
技术研发人员:钱坤 黄志俊 刘金勇 陈家兴
受保护的技术使用者:杭州柳叶刀机器人有限公司
技术研发日:2022.03.16
技术公布日:2022/6/21
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。