用于对组织进行消融的医疗系统
相关申请的交叉引用
1.本技术要求2019年11月5日提交的美国临时专利申请第62/930,721号的优先权,该临时专利申请的全部内容以引用的方式并入本文中。
技术领域
2.本公开的各种方面总体上涉及组织消融,包括组织的射频消融。更具体地,在其他方面,本公开的至少某些实施方案涉及用于对组织进行消融的系统、装置、及相关方法。
背景技术:
3.技术发展已给医疗系统、装置的用户、及方法提供了在受试者上执行越来越复杂手术的能力。例如,组织的消融常常牵涉到传输射频能量从而对组织进行消融的装置的使用。在一些实例中,用户可执行通过设定恒定的功率和消融时间段来管理的射频消融治疗算法,以对所需组织进行治疗。来自此方法的组织消融区可以是对需要治疗的组织的粗略估计,因为在治疗期间医生会不具有直接可视化,而是在治疗期间和治疗后可具有有限的反馈用于确认靶向组织的精确治疗。在一些实例中,这种治疗算法会导致与电外科手术相关的损伤数量的增加。例如,一部分的健康组织会被无意中消融。对于克服此和/或其他困难的电手术装置和系统存在着需求。
技术实现要素:
4.另外,本公开的各方面涉及用于对组织进行消融的系统、装置、和方法。本文中所公开方面的每个方面可包括结合任何其他所公开方面而描述的一个或多个特征。
5.医疗系统可包括用于对组织进行消融的导管;该导管包括:包括远端的柔性纵向主体、和从纵向主体的远端向远侧延伸的远侧部。远侧部可包括多个电极。该医疗系统也可包括一个或多个控制单元,这些控制单元联接到导管并且构造成(1)控制向多个电极的每个电极的电能供给及(2)自动地控制导管的远侧部的位置。
6.本文中公开的任何系统和装置可具有以下特征中的任一特征。驱动系统可构造成使导管向近侧和向远侧移动,并且驱动系统可与一个或多个控制单元通信并且由一个或多个控制单元控制。功率发生器可联接到一个或多个控制单元并且被一个或多个控制单元所控制,用于提供电能给多个电极的每个电极;并且扫描仪可构造成产生患者解剖结构的图像。一个或多个控制单元可构造成对多个电极的每个电极的阻抗进行监测,并且基于所检测的阻抗而调节提供给多个电极的每个电极的电能。图形用户界面可构造成允许用户选择用于被多个电极消融的靶向组织的区域。一个或多个控制单元可构造成基于由扫描仪所产生的至少一个图像而调节提供给多个电极的至少一个电极的电能的量。一个或多个控制单元可包含多个存储的消融图案,并且各存储的消融图案可包含用于多个电极的每个电极的输出能量水平。导管可包括从导管的近侧部延伸至远侧部的内部元件。内部元件可包括远侧凸起部(其中径向最外表面与远侧部的径向内表面接触),内部元件可位于远侧部和纵向
主体的内部并且可相对于远侧部和纵向主体而移动,并且内部元件可构造成独立于多个电极的其他电极而传递电能至多个电极的每个电极。导管可包括位于远侧部内部的超声探头。扫描仪可构造成对超声探头的位置进行检测。导管的远侧部可以是可膨胀的并且可包括内部和外表面,其中多个电极的每个电极从内部延伸至外表面。导管的远侧部可呈圆柱形并且可包括圆锥形的远侧部和圆锥形的近侧部;并且多个电极可在远侧部的径向最外部周围形成网格图案。远侧凸起部可构造成当与各电极接触时独立地激活多个电极的每个电极,远侧凸起部可构造成纵向地平移并且相对于远侧部而旋转。多个电极的每个电极可不连接到近侧导线,并且远侧凸起部可以是弯曲的。驱动系统可包括多个电机,用以使导管纵向地平移并且使导管围绕导管的纵向轴线而旋转。一个或多个控制单元可构造成独立地提供电能给多个电极的每个电极。
7.在另一个实例中,医疗系统可包括用于对组织进行消融的导管;该导管包括柔性纵向主体(其包括远端)、和从纵向主体的远端向远侧延伸的远侧部(该远侧部包括多个电极)。该医疗系统也可包括一个或多个控制单元,这些控制单元联接到导管并且构造成(1)独立地提供电能至多个电极的每个电极、及(2)自动地控制导管的远侧部的位置。该医疗系统还可包括构造成使导管向近侧和向远侧移动的驱动系统。该驱动系统可与一个或多个控制单元通信并且由一个或多个控制单元所控制。另外,该医疗系统可包括功率发生器,该功率发生器联接到一个或多个控制单元并且由一个或多个控制单元所控制,用于提供电功率至多个电极的每个电极。
8.本文中所公开的任何系统或装置可具有任何的以下特征。导管的远侧部可以是可膨胀的并且可包括内部和外表面,并且多个电极的每个电极可从内部延伸至外表面。
9.对组织进行治疗的方法可包括将导管的远侧部定位在靠近治疗区的位置,使得远侧部的多个电极的至少一个电极与治疗区相邻。该方法也可包括利用控制单元激活多个电极中的至少一个电极,以对治疗区的组织进行治疗。该方法还可包括自动地使导管的远侧部相对于治疗区而移动;及利用控制单元激活多个电极中的至少一个其他电极,以对治疗区的组织进行治疗。
10.本文中公开的任何方法可包括任何的以下步骤或特征。该方法还可包括基于多个电极中的至少一个电极的所测量阻抗而调节提供给多个电极中的至少一个电极的电能的量。该方法也可包括使导管的内部部件相对于远侧部而移动,以激活多个电极中的另一个电极。
11.可以理解的是,前面的概述和以下的详细描述两者都只是示例性和解释性的,而不是对如要求专利保护的本发明的限制。附图标记
12.并入本说明书中且构成本说明书的一部分的附图图解说明了本公开的各示例性方面,并且连同描述内容是用来解释本公开的原理。
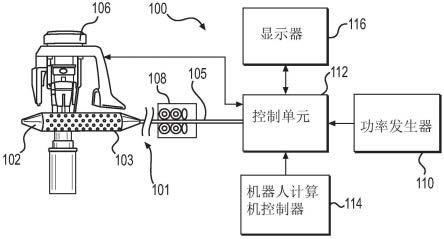
13.图1是根据本公开各方面的示例性医疗消融系统的示意图。
14.图2a-图2d是根据本公开各方面的示例性医疗装置的一部分的侧视图和各种消融形状。
15.图3是根据本公开各方面的位于体腔内部的示意性医疗装置的一部分的侧视图。
16.图4是根据本公开各方面的示意性医疗装置的一部分的侧视图。
17.图5是根据本公开各方面的示意性医疗装置的一部分的前剖视图。
18.图6是根据本公开各方面的示意性医疗装置的一部分的侧视图。
具体实施方式
19.在其他方面,本公开是关于用于对组织进行消融、切割、磨除、蒸发、或者损伤或破坏的系统、装置、和方法。现在将详细地参考本公开的各方面,在附图中对这些方面的实例进行图示说明。只要有可能,在全部附图中,相同或相似的附图标记将用于指代相同或类似的部件。术语“远侧”是指当把装置导入患者中时最远离使用者的部分。相反,术语“近侧”是指当把装置置入患者中时最接近使用者的部分。如本文中使用的词语“包括(comprise)”、“包括(comprising)”或其任何其他变体意图涵盖非排他性包含,使得包括一系列要素的过程、方法、物件、或装置不必只包括这些要素,而且可包括未明确地列出的或者这种过程、方法、物件、或装置所固有的其他因素。术语“示例性的”是以“示例”而不是“理想”的含义而使用。
20.本公开的实施方案可用于对在腔内空间中的组织进行消融,或者促进其过程。具体地,一些实施方案包括可膨胀或可冲胀的装置(其包括多个电极)。可经过内窥镜工作通道或用于引导装置的其他结构将该装置输送至靶组织,或者可在没有内窥镜的情况下独立地输送至靶组织部位。在一些实例中,在将装置插入患者的身体中之前,可将该装置从近侧端口经过内窥镜、胃镜、结肠镜、柔性导管、或其他医疗装置工作通道向远侧输送或回送。本文中描述的装置的全部或部分可以是金属、复合材料、塑料,或者包含形状记忆金属(如镍钛合金)、形状记忆聚合物、聚合物、或者生物相容性材料的任意组合。
21.图1示出了根据本公开一个实施方案的示例性手术系统100。系统100可包括导管器件101、扫描仪106、控制单元112、功率发生器110、机器人计算机控制器114、显示器116、和电机组件108。导管器件101构造成移动经过患者的体腔,并且利用在导管器件101的远侧部102的外表面上的一个或多个电极103对组织进行消融。在微创手术(如腹腔镜或内窥镜手术、或任何其他合适的医疗手术)期间,可使用导管器件101。导管器件101可用于射频消融并且可构造成将由无线电波产生的电流施加给组织。
22.如图1中所示,导管器件101可包括远侧部102、近侧细长部件105、及位于远侧部102的表面上的一个或多个电极103。远侧部102可呈圆柱形,并且可具有锥形的、圆锥形形状的近端和远端。远侧部102的近端可径向地向内变窄至最近侧端部,并且最近侧端部可联接到近侧细长部件。远侧部102可以是可膨胀或可冲胀的主体并且可包括近侧内腔(未图示),该近侧内腔将近侧细长部件105的内腔(未图示)连接到远侧部102的内腔。一个或多个电极103可位于远侧部102的外表面上。在一些实例中,多个电极103可位于远侧部102的表面上,并且可各自经过位于近侧细长部件105内部的一条或多条线(导线)而连接到控制单元112。在一些实例中,各电极103可经过一条或多条线或者印在远侧部102内表面上的其他导电体而连接到控制单元112。在一些实例中,各电极103可独立地被控制,并且在远侧部102上的交替的电极103可连接到相反的正极或负极。例如,远侧部102可以正电极103与负电极103相邻的双极器件。在一些实例中,电极103可在远侧部102的表面上形成网格。电极103可在远侧部102的表面上形成图案,该远侧部102可围绕远侧部102的纵向轴线而周向地延伸。该图案可包括例如多个纵向排的电极103、及多个周向环的间隔电极103。在一些实例
中,电极103可呈圆形,并且/或者远侧部102可包括至少5、10、15、20、24、50、或100个电极103。在一些实例中,电极103可以以网格图案均匀地间隔,例如以跨越相对于远侧部102的纵向中心轴线的远侧部102的部分或整个径向外表面的网格图案均匀地间隔。在一些实例中,电极103可以以仅跨越相对于远侧部102的纵向中心轴线的远侧部102的径向最外表面的网格图案均均匀地间隔。在一些实例中,各电极103可从远侧部102的外表面突出,并且在其他实例中各电极可与远侧部102的外表面齐平。远侧部102的外表面可以是柔性的、可压缩的、和/或可弯曲的,并且可构造成与患者解剖结构的不规则表面一致。各电极103可与控制单元112通信,使得控制单元112可对各电极103的阻抗和其他电特性进行监测并控制提供给各电极103的功率/电流。
23.远侧部102可以是可冲胀的或者可膨胀的,可包含柔顺和/或非柔顺的材料,并且可流体地连接到延伸经过近侧细长部件105的内腔(未图示)。可将空气、盐水、或另一种流体输入该内腔中,以使远侧部102充胀。在其他实例中,远侧部102可以是刚性的。近侧细长部件105可呈圆筒形,并且可构造成使远侧部102平移、旋转、或移动经过体腔。例如,近侧细长部件105可以是柔性的并且构造成能弯曲经过体腔的曲折路径,并且也可具有充分的刚性以便当使近侧细长部件105向远侧平移时使远侧部102平移经过体腔。近侧细长部件105的近侧部可联接到控制单元112。
24.控制单元112可能够与导管器件101相互连接,以提供电流给一个或多个电极103并且对各电极103的阻抗进行监测。控制单元112可联接到扫描仪106、显示器116、功率发生器110、机器人计算机控制器114、电机108、和/或导管器件101,并且与它们通信。控制单元112可由外接电源(如电插座)和/或功率发生器110提供动力。控制单元112可包括按钮、旋钮、触摸屏、一个或多个图形用户界面、或其他用户界面,用以控制控制单元112的一个或多个处理器。在一些实例中,显示器116可提供用于控制单元112的图形用户界面,并且显示器116可由一个或多个监测器所组成,用于显示从控制单元112或系统100的其他装置所接收的数据。控制单元112可构造成使使用者能够设定提供给导管器件101的电刺激的图案,如通过改变被充电的电极103、利用电机组件108调节导管器件101的定位、和/或将预先设定的电刺激图案提供给导管器件101。例如,控制单元112可构造成根据用户的或算法的选择而激活各组的电极103并提供电功率给各组的电极103。在一些实例中,控制单元112可构造成独立地调节提供给各电极103的电功率。控制单元112可构造成接收并监测关于导管器件101或导管器件101的一些部件(如一个或多个电极103)的温度、阻抗、位置、或其他参数的信息。
25.电机组件108可包括一个或多个电机,并且可构造成使导管器件101移动经过患者的体腔。电机组件108可包括一个或多个旋转电机及一个或多个平动电机,并且可构造成接纳导管器件101的近侧部。电机组件108可构造成使导管器件101移动(包括平移和/或旋转)并且可接收来自控制单元112的指令。机器人计算机控制器114可以是控制单元112的部件或与之分离并且与之连接。在一些实例中,用户可与机器人计算机控制器114互动,例如经由鼠标、旋钮、触摸屏、或者的其他用户界面将指令直接地传递至电机组件108或者经过控制单元112传递至电机组件108。在一些实例中,在将导管器件101的近端联接到控制单元112之前,用户可将导管器件101的近侧部插入经过电机组件108。在一些实例中,电机组件108可提供用于将导管器件101自动地定位在患者身体的靶区内部的机构。
26.扫描仪106可以是三维计算机断层(ct)扫描仪、超声扫描仪,或者用于扫描患者解剖结构、获取患者解剖结构的图像、和/或存储患者解剖结构图像的任何其他类型扫描仪。扫描仪106可构造成使在患者身体内部的治疗区成像,并且将图像输出至控制单元112用于显示。在一些实例中,扫描仪106可构造成当导管器件101移动经过患者的身体时对导管器件101进行检测。扫描仪106可操作地联接到控制单元112,以便控制单元112在使用导管器件101的手术期间接收实时图像。在一些实例中,扫描仪106可构造成对患者组织的消融量成像。
27.在一些实例中,用户可使用系统100进行手术,首先利用扫描仪106使在患者身体内部的治疗区成像。例如,用户可利用计算机断层(ct)扫描对患者的身体进行扫描,并且可产生包含例如体腔的患者解剖结构的三维图像。然后用户可利用控制单元112和显示器116经由图形用户界面(gui)显示患者解剖结构的三维图像。一旦在各图像中确认(识别)了治疗区,用户便可利用gui来选择待治疗的组织的近似体积(大致体积),例如,在图像中显示的待消融组织的近似体积。在一些实例中,控制单元112然后可进行选择执行成像阈值处理(成像阈值化,imaging thresholding)、配准(registration)、和矩阵变换,以对所选择靶组织进行区域分隔。在一些实例中,成像阈值转换可包括这样的方法:识别在某个颜色强度(或阈值颜色强度)之间的体素,并根据用于识别形状的算法而确定体素的集。利用成像阈值转换连同本领域中已知的其他图象处理技术,基于体素和/或像素颜色强度而识别形状可促进对患者中患病组织的位置的识别。在一些实例中,体素和/或像素颜色强度可与由ct扫描仪所产生图像中的组织密度相关联。
28.图像配准可包括将三维空间中的坐标与各体素的图像联系起来的方法,例如通过使用来自初始扫描的图像。然后,可对产生随后图像的随后扫描与初始扫描进行比较,并且可对来自随后扫描的图像中各体素的坐标与来自初始扫描图像中各体素的坐标进行比较,这可允许用户识别在随后图像中各体素在三维空间中所处的位置。图像配准的方法也可包括应用矩阵变换,以获得从初始扫描图像中所示初始起始位置到来自随后扫描的图像中所示新位置在空间中各体素的平移和旋转的信息。此方法可通过本领域中已知的任何图像处理手段而执行。另外,图像配准可用于对患病组织的定位进行跟踪。
29.例如,控制单元112可生成在患者解剖结构的一个或多个图像内部所示的期望治疗区的图像叠加。一旦用户已选择了治疗区并且控制单元112已计算出待消融组织的体积,控制单元112便可计算消融计划。消融计划可以是如何使用系统100,具体地如何使用导管器件101,的手术计划,其通过规定导管器件101的待激活的特定电极103和规定在远侧部102位于靠近或位于治疗区时要施加至各电极的特定电能,以对治疗区进行消融。例如,消融计划可牵涉到变化的形状、深度和长度的多次叠加消融。在一些实例中,消融计划旨在包含全部的治疗区,同时使被消融健康组织的量最小化。例如,消融计划可包含指令,用以激活特定组的电极103从而形成以治疗区的不健康组织为目标的某种形状的消融区。在一些实例中,消融计划可包含用于电机组件108的特定指令,从而利用电机组件108将远侧部102定位在治疗区。该消融计划可包含指令,用于机器人计算机控制器114执行,以将导管器件101的远侧部102定位在治疗区。在一些实例中,视需要,用户可确认消融计划并且可经由图形用户界面做出对消融计划的调整。
30.当执行消融计划时,用户可将远侧部102定位成靠近和/或定位在所选择的治疗
区。例如,用户可使远侧部102的活动部分或者电极103所处部分与治疗区对准。用户可利用扫描仪106对远侧部102的定位进行监测,并且可利用显示器116使远侧部102在患者身体内部的定位可视化。在一些实例中,控制单元112可生成并存储远侧部102在治疗区的位置的参考点,其利用由扫描仪106所产生的图像计算出。该参考点或参考位置可以是利用来自治疗区的初始扫描的初始图像所生成的远侧部102的初始状态和/或初始位置。在一些实例中,参考点或参考位置可以是在对所选择的治疗区进行治疗之前供用户识别的起始位置。参考点可被控制单元112用来计算远侧部102相对于治疗区的所需移动。
31.一旦参考点已被确立并存储于控制单元112中,控制单元112便可根据前面所概述的消融计划利用电机组件108使导管器件101移动到治疗的起始点。在一些实例中,控制单元112可发送指令至电机组件108以使导管器件101自动地移动,例如在没有来自近侧手柄的人机械输入的情况下。一旦导管器件101(具体地远侧部102)位于起始点,控制单元112便可激活功率发生器110并且以预定的功率和电压限制设定向特定组的电极103提供能量。通过给特别地选定的电极103提供预定量的能量,系统100可形成类似于在消融计划中所确立的计划好的某种形状的消融。在一些实例中,控制单元112可对来自每个电极103的实时阻抗反馈进行测量,并且可基于所测量的阻抗反馈而主动地调节供给给每个电极103的能量。在一些实例中,在将初始的某种形状的消融施加给治疗区之后,可使导管器件101的远侧部102移动,然后控制单元112可给不同的特别地选定组的电极103提供预定量的能量。可重复此过程,直到整个治疗区已被消融。在一些实例中,控制单元112可基于来自每个电极103的测量的阻抗反馈而自动地计算新的消融计划。
32.在使用导管器件101的消融之后,用户然后可利用扫描仪106获得ct或其他医学图像,并且可对新近获得的图像与用于创建消融计划的图像进行比较。然后,可将显示靶向组织(如患病组织)的图像与显示被消融组织的图像相互配准并进行比较以对消融治疗的程度进行定量,并且确认是否全部的所需组织已被消融。如果靶组织的各部分仍然存在,那么用户可创建新的消融计划以对剩余的组织进行消融。
33.图2a-图2d示出了通过选择导管器件201的特定电极203用以激活而形成的各种消融图案。各消融区214、215、220、225、230可代表被消融组织的各部分,并且各消融区214、215、220、225、230可通过对供给各电极203的电能的调节和远侧部202的移动而形成。图2a示出了导管器件201,该导管器件201包括远侧部202、电极203、近侧细长部件205、和消融图案213。消融图案213包括中心区214和两个侧向区215,其中该中心区214具有相对于侧向区215的最大消融深度。消融图案213的径向最外边缘是弯曲的。可改变提供给各电极203的电能,并且可使远侧部202移动,以形成消融图案213。
34.图2b示出了导管器件201和消融图案219,该消融图案219包括在导管器件201的相反侧上的偏心消融区220。消融区220可包括位于远侧部202的相反侧上的两个圆形形状并且包括弯曲的径向最外边缘。消融区220的各部分可由远侧部202的不同组的电极203所形成。消融区220的各部分可呈半圆形的形状。
35.图2c示出了导管器件201、及包括螺旋状形状消融区225的消融图案224。消融区225可由围绕远侧部202表面定位的多个电极203所形成。消融区225可环绕远侧部202,并且在一些实例中,可对沿体腔周向地延伸的组织部分进行消融。消融图案224可呈螺旋状和/或拔塞器螺杆(cork-screw)状。
36.图2d示出了导管器件201和消融图案229,该消融图案229包括梯度控制的消融区230,随着消融区230从远侧部202的近端延伸至远侧部202的远端,该消融区230从导管器件211的纵向轴线径向地向外增大。消融区230的远侧部可大于消融区230的近侧部,并且消融区230可形成一个或多个三角形形状。在一些实例中,消融区230可在其一个或多个最近侧端部逐渐变窄至一个点。施加给最远侧电极203的能量可大于施加给最近侧电极203的能量,以形成消融区230。在其他实例中,消融图案可包括近侧部大于远侧部的消融图案,并且随着消融图案向远端延伸,消融图案可朝向导管器件的纵向中心轴线而径向地向内变窄。
37.图2a-图2d是示例性的,并且可通过使用导管器件201的多个电极203并调节来自各电极203的能量输出而形成多种不同的消融图案。另外,导管器件201的移动(如向近侧、向远侧、或侧向的平移,或者围绕其纵向轴线的旋转)可允许导管器件201形成另外的和变化的消融图案。例如,消融计划的部分可包括使导管器件201围绕其纵向轴线顺时针旋转90度和逆时针旋转90度、或者在任一方向上旋转其他度数。
38.图3示出了导管器件301,该导管器件301包括远侧部302、电极303、和近侧细长部件305(全部的这些部件均位于患者的体腔345内部)。在内腔345附近的组织350包括靶区330。与治疗区330的中间部332和近侧部333相比,治疗区330的远侧部331需要不同深度和形状的消融。通过调节施加给各电极303的能量并且使导管器件301在内腔345内部移动,用户可形成消融图案,该消融图案与治疗区330对齐并且将治疗区330的组织作为目标而不损伤与治疗区330相邻的组织。图3描绘了不规则形状的治疗区的一个实例。选择性地激活并调节从导管器件301的多个电极303中放出的能量的能力,提供了基于用户和患者需求来调节消融图案的益处。
39.图4示出了导管器件401的一个替代实施方案,该导管器件401包括远侧部402、多个电极403、和近侧细长部件405。导管器件401可具有本文中关于导管器件101、201、301所描述的任何特征。导管器件401大致类似于导管器件101,然而每个电极403不连接到通向控制单元的各个相应的导线。相反,各电极403通常由电极403共用的内部元件460供电/电流。内部元件460可呈圆柱形(例如,杆、线,等),可位于远侧部的内部,并且可延伸经过近侧细长部件405的内腔。内部元件460可包括远侧凸起部462,该凸起部在元件460的远端从内部元件460的纵向轴线径向地向外延伸。远侧凸起部462的径向最外表面463可构造成与远侧部402的内表面465接触并且可滑动地结合。例如,内部元件460围绕其纵向轴线的旋转和/或使内部元件460向近侧或向远侧平移可使远侧凸起部462的径向最外表面463沿远侧部402的内表面465而平移,使得径向最外表面463仍然保持与内表面465接触。
40.内部元件460的近端可构造成联接到控制单元112,并且可包含导电材料用以将电能从控制单元112传递至内部元件460的远侧凸起部462。当远侧凸起部462的径向最外表面463接触一个或多个电极403时,内部元件460可将由控制单元112供给的电能传递至一个或多个电极403。例如,当远侧凸起部与一个或多个电极403的内表面接触时,远侧凸起部462可与一个或多个电极403形成电连接。可使内部元件460向近侧或向远侧移动和围绕其纵向轴线旋转以定位至特定电极403以电激活。在一些实例中,内部元件460可连续地向近侧和/或向远侧平移并且/或者以特定频率旋转以形成用户期望的消融图案。在一些实例中(未图示),导管器件可包括内部元件(类似于内部元件460),该内部元件具有可同时地接触多个电极的多个凸起部(类似于凸起部462),并且在一些实例中,导管器件可包括可同时地接触
多个电极的多个内部元件(类似于内部元件460)。
41.图5示出了导管器件401的剖面c的前视图。箭头470示出了围绕内部元件460的纵向轴线而旋转的远侧凸起部462。远侧凸起部462可以是弯曲的,如图5中所示,并且可形成c形状。在一些实例中,远侧凸起部462可以是刚性的,并且在其他实例中,远侧凸起部462可以是柔性的。各电极403可包括径向地向内的表面,在导管器件401的操作期间该向内表面保持暴露于远侧部402的内部空间,以允许远侧凸起部462的径向最外表面463直接地接触各电极403。
42.导管器件401可以以大致与上文中所描述导管器件101大致相同的方式而操作。在一些实例中,内部元件460的近侧部可联接到电机组件,该电机组件独立于用于控制远侧部402和近侧细长部件405的位置的电机组件。通过用内部元件460激活各电极403,导管器件401可不需要来自各电极403的另外的接线并且可方便导管器件401的制造和微型化。
43.图6示出了导管器件601的另一个替代实施方案,该导管器件601包括远侧部602、多个电极603、和近侧细长部件605。导管器件601可具有本文中关于导管器件101、201、301、401所描述的任何特征。导管器件601可包括超声探头672,该超声探头672联接到位于导管器件601的内部中的内部构件670。超声探头672可位于远侧部602的内部中并且可发射超声信号。超声探头672可与控制单元112电性连接和通信,例如经过延伸经过内部部件670的内部的导线。在操作中,从超声探头672中发射的信号可允许用户通过超声成像而监测在患者的身体内部远侧部602的位置。例如,扫描仪106可包括超声扫描仪,并且可用于在手术期间对远侧部602在患者身体内部的位置进行监测。当把导管器件601的远侧部602定位在位于患者身体内部的治疗区时,通过使用超声探头672,用户可利用超声成像确定远侧部602的位置。在一些实例中,超声探头672可使用户能够利用超声成像技术形成患者组织的消融的三维视图。
44.通过提供用户可选择性地对组织进行消融并特定地调节施加给位于治疗区的多个电极的功率的导管器件,用户可减少对健康组织的损伤并且避免在射频消融术期间由组织的过度消融所造成的对患者身体的不必要损害。
45.对于本领域技术人员将显见的是,在不背离本公开范围的前提下,可在所公开的装置和方法中做出各种修改和变更。基于对本说明书的考量和本文中所公开特征的实施,本公开的其他方面对于本领域技术人员而言将是显而易见的。意图是本说明书和实例被认为是只是示例性的。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。